Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Определение путевой скорости и угла сноса по БРЛС
|
|
Определение путевой скорости. Все ориентиры на экране по мере движения ВС перемещаются в сторону, противоположную направлению движения ВС, то есть, на экране примерно вниз. Именно примерно, поскольку ВС летит не в направлении продольной оси (курсовой черты на экране), а в направлении вектора путевой скорости, с учетом УС.
Необходимо выбрать РЛО (или РЛТ) обязательно вблизи курсовой черты и в момент пересечения им какой-либо метки дальности включить секундомер. В момент пересечения им другой метки дальности секундомер останавливается. Расстояние между выбранными метками дальности должно быть не менее 40 км, иначе точность будет очень низкой (см. п. 1.4).
Очевидно, что расстояние, пройденное ВС за измеренное время, равно расстоянию, на которое сместился ориентир. Его определить нетрудно, поскольку интервал между метками дальности на каждом масштабе известен. Следовательно, разделив расстояние на время, можно легко определить путевую скорость. Расчет обычно выполняется на НЛ-10.
Теоретически «засекать» время можно при любой дальности ориентира, даже когда он находится между метками дальности. Но точность определения дальности и, следовательно, путевой скорости, будет гораздо ниже.
Если ориентир выбрать не вблизи курсовой черты, то при смещении на экране «вниз» он будет пересекать метки дальности не под прямым углом и пройдет расстояние, не равное интервалу между метками.
Определение угла сноса в режиме «Снос». В режиме «Снос» бортового радиолокатора сканирование антенны прекращается. Она останавливается в случайном положении и импульсы излучаются только в одном направлении. Изображение местности исчезает, экран становится темным и на нем видна только яркая линия развертки (рис. 9.12). Точки на этой линии мерцают из-за доплеровских биений частоты. Для наглядности это можно объяснить себе следующим образом (хотя это объяснение и не очень корректно). При движении ВС расположенные на земле РЛТ перемещаются в направлении, обратном направлению вектора путевой скорости, то есть, скорее всего, под каким-то углом к линии развертки, которая сама направлена случайным образом. Здесь под РЛТ понимаются вообще все точки на земной поверхности. Какие-то из них ярче, какие-то слабее. Эти РЛТ хаотично пересекают линию развертки, что и создает мерцания.
Клавишами управления антенной, которые расположены слева от экрана, линию развертки (направление антенны) можно направить в любую сторону. Задача пилота – подобрать такое положение антенны, чтобы мерцания на линии развертки стали как можно медленнее, желательно, чтобы почти остановились. Это положение антенны будет соответствовать направлению вектора путевой скорости. Ведь тогда ориентиры будут не пересекать линию, создавая мерцания, а довольно медленно двигаться вдоль нее.
Угол сноса – это угол между вектором истинной скорости, который направлен по курсовой черте, и вектором путевой скорости, который направлен по подобранному положению развертки. Его можно просто отсчитать по шкале курсовых углов на краю экрана.
Точность такого способа определения УС невелика, СКП составляет 2- 3°. Но на тех ВС, на которых не установлен ДИСС, но установлена БРЛС, это основной способ определения УС.
Способ половинной дальности. Существует способ, называемый базисным способом, с помощью которого можно определить одновременно W и УС по КУО и D любого ориентира, измеренным в два разных момента времени. Формулы расчета этим способом несколько громоздки для расчета на НЛ-10, поэтому в данном учебном пособии не приводятся. Но частный случай этого способа, называемый способом половинной дальности, может быть легко реализован на практике.
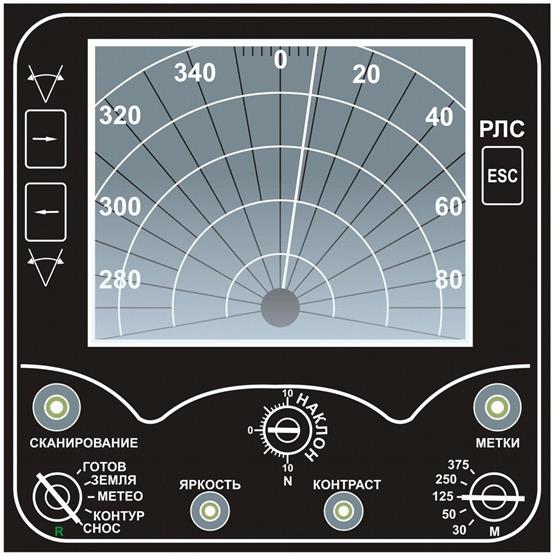
Рис. 9.12. Вид экрана в режиме «Снос»
«Частным» этот случай является потому, что ориентир должен находиться не в любом месте экрана, а вблизи курсовой черты. Кроме того, дальность D2 во второй момент времени должна быть вдвое меньше дальности D1 в первый момент времени. Эти допущения позволяют значительно упростить расчетные формулы.
Пилот должен выбрать подходящий ориентир и две метки дальности такие, что дальность второй метки равна половине первой (например, 100 км и 50 км).
При прохождении первой метки дальности включается секундомер и записывается курсовой угол ψ 1 и дальность D1. При прохождении ориентиром второй метки секундомер останавливается, и фиксируются ψ 2 и D2. За пройденное время изменится не только дальность, но и курсовой угол ориентира, поскольку ВС из-за угла сноса летит не в направлении курсовой черты.
Путевая скорость рассчитывается обычным способом по пройденному за измеренное время расстоянию на НЛ-10 или, с учетом того, что D1=2D2, по формуле
W=(D1-D2)/t = D2/t.
Угол сноса α определяется по простой формуле
α = 2ψ 1 - ψ 2. Приведем пример расчета УС таким способом.
Пусть ψ 1 = 358°= -2°, ψ 2=354°= -6°.
Тогда УС= 2(-2)-(-6)=+2°.