Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Модели измерительного процесса
|
|
Всякая реальная система, материальный объект характеризуются бесконечным числом переменных. Когда мы описываем, характеризуем систему, то, исходя из своих предположений, делаем бесконечное число различных выборов из конечного числа переменных. Таким образом, фактически исследуем не подлинную систему, не подлинное физическое явление, а его модель, в определенном смысле подобную истинной системе.
Модель — система, которая не отличается от моделируемого объекта в отношении некоторых его свойств, именуемых «существенными», и отличается от него в отношении других свойств, называемых «несущественными».
В теории моделирования различают три принципиальных способа:
полное моделирование — способ, обеспечивающий подобие движения материи во времени и пространстве. Различие между объектом исследования и моделью количественное, масштабное;
неполное моделирование — способ, при котором протекание основных процессов, характеризующих изучаемое явление или процесс, подобно только частично;
приближенное моделирование — способ, применяемый наиболее часто, при котором некоторые факторы, влияющие на процесс, но не оказывающие на него решающего действия, либо вовсе не моделируются, либо моделируются приближенно, грубо.
Для проведения измерений необходимы объект измерения (измеряемая величина), средства и метод измерения, а также оператор. Кроме того, измерения выполняют в какой-либо среде и по определенным правилам. Принято объект измерения считать неизменным, т.е. всегда предполагается, что существует истинное (действительное) постоянное значение измеряемой величины. Остальные составляющие процесса измерений — средства, условия и даже оператор — все время меняются. Эти изменения могут быть случайными, их мы не в состоянии предвидеть, и не случайными, но такими, которые мы не смогли заранее предусмотреть, оценить и учесть. Если они влияют на результаты измерений, то при повторных измерениях одной и той же величины результаты будут отличаться один от другого тем сильнее, чем больше факторов не учтено и чем сильнее они меняются.
4. Механизмы и измерительные цепи электромеханических приборов.
Электромеханические измерительные приборы отличаются простотой, дешевизной, высокой надежностью, разнообразием применения, относительно высокой точностью.
Любой ЭИП состоит из ряда функциональных преобразователей, каждый из которых решает свою элементарную задачу в цепи преобразований.
Так, самый простейший прибор прямого преобразования (вольтметр, амперметр) состоит из трех основных преобразователей: измерительной цепи (ИЦ), измерительного механизма (ИМ) и отсчетного устройства (ОУ) (рис. 2.1).
Измерительная цепь обеспечивает преобразование электрической измеряемой величины X в промежуточную электрическую величину Y (ток или напряжение), функционально связанную с измеряемой величиной и непосредственно воздействующую на измерительный механизм.
Измерительный механизм является электромеханическим преобразователем, осуществляющим преобразование электрической величины Y в наглядное аналоговое показание α.
На магнитном воздействии электрического тока основаны: магнитоэлектрический, электромагнитный, индукционный, электродинамический и вибрационный ИМ; на тепловом воздействии электрического тока — биметаллический и тепловой ИМ. На взаимодействии заряженных электродов, находящихся под напряжением, основан принцип работы электростатического ИМ.
Отсчетное устройство состоит из указателя, жестко связанного с подвижной частью ИМ, и неподвижной шкалы. Указатели бывают стрелочные (механические) и световые. Шкала — совокупность отметок в виде штрихов, расположенных вдоль линии, по которым определяют числовое значение измеряемой величины. Шкалы градуируют в единицах измеряемой величины (именованная шкала), либо в делениях (неименованная шкала).
В общем случае на подвижную часть ИМ при ее движении воздействуют вращающий момент Мвр, моменты: противодействующий Мпр и успокоения Мусп
| X | ИЗМЕРИТЕЛЬНАЯ ЦЕПЬ | Y | ИЗМЕРИТЕЛЬНЫЙ МЕХАНИЗМ | α | ОТСЧЕТНОЕ УСТРОЙСТВО |
Рис. 4.1. Структурная схема электромеханического измерительного прибора
Вращающий момент для ИМ, использующих силы электромагнитного поля,
MBp = dWм/da, (4.1.)
где dWM — изменение запаса энергии магнитного поля; а — угол отклонения подвижной части.
Противодействующий момент в электромеханических приборах необходим для создания соответствия измеряемой величины определенному углу отклонения подвижной части. В аналоговых электрмеханических приборах противодействующий момент создается либо при помощи спиральных пружин (растяжек и подвесов), либо за счет энергии электромагнитного поля (в логометрах). В случае, когда противодействующий момент создается спиральной пружинкой,
Мпр = Wa, (4.2.)
где W — удельный противодействующий момент, зависящий от геометрических размеров и материала пружины (растяжек).
Момент успокоения является моментом сил сопротивления движению, направлен всегда навстречу движению подвижной части ИМ и пропорционален угловой скорости отклонения:
Mycn = P(da/dt), (4.3.)
где Р — коэффициент успокоения (демпфирования).
В ИМ наиболее часто применяют магнитоиндукционные и воздушные успокоители, а для создания очень большого успокоения — жидкостные успокоители.
Несмотря на большое разнообразие конструкций и типов приборов все они имеют ряд общих узлов и деталей. Такими деталями являются: корпус, шкала, указатель, устройства для установки и уравновешивания подвижной части, создания противодействующего момента и успокоения, корректор и в высокочувствительных приборах — арретир.
Магнитоэлектрические приборы. Магнитоэлектрические приборы (МЭП) состоят из измерительной цепи, измерительного механизма и отсчетного устройства (см. рис. 2.1). Конструктивно измерительный механизм может быть выполнен либо с подвижным магнитом, либо с подвижной катушкой. На рис. 2.2 показана конструкция прибора с подвижной катушкой. Постоянный магнит 1, магнитопровод с полюсными наконечниками 2и неподвижный сердечник 3составляют магнитную систему механизма. В зазоре между полюсными наконечниками и сердечником создается сильное равномерное радиальное магнитное поле, в котором находится подвижная прямоугольная катушка 9, намотанная медным или алюминиевым проводом на алюминиевый каркас (применяют и бескаркасные рамки).
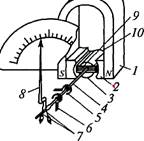 Рис. 2.2. Схема устройства магнитоэлектрического прибора:
Рис. 2.2. Схема устройства магнитоэлектрического прибора:
1 — постоянный магнит; 2 — полюсные наконечники; 3 — неподвижный сердечник; 4, 10 — полуоси; 5, 6 — спиральные пружины; 7 — передвижные грузики; 8 — стрелка; 9 — подвижная прямоугольная катушка
Катушка (рамка) может поворачиваться в зазоре на полуосях 4 и 10. Спиральные пружины 5 и 6создают противодействующий момент и используются для подачи измеряемого тока от выходных зажимов прибора в рамку (механические и электрические соединения на рисунке не показаны). Рамка жестко соединена со стрелкой 8. Для балансировки подвижной части имеются передвижные грузики 7.
Выражение для вращающего момента магнитоэлектрического прибора можно получить из (4.1). Запас электромагнитной энергии в контуре с током I, находящимся в поле постоянного магнита,
Из (4.9) следует, что угол отклонения подвижной части ИМ прямо пропорционален току в катушке, поэтому магнитоэлектрические приборы имеют равномерные шкалы.
В магнитоэлектрических приборах успокоение подвижной части магнитоиндукционное, т.е. создается взаимодействием магнитных полей от вихревых токов в каркасе катушки и поля постоянного магнита.
Достоинства: высокий класс точности — 0, 05 и ниже, равномерная шкала, высокая и стабильная чувствительность, малое собственное потребление мощности, большой диапазон измерений, на показания МЭП не влияют внешние магнитные и электрические поля.
Недостатки: без преобразователей МЭП используют только в цепях постоянного тока, имеют малую нагрузочную способность, сложны и дороги, на их показания влияют колебания температуры.
Применение: магнитоэлектрические ИМ используют в амперметрах, вольтметрах, гальванометрах (обычных, баллистических и вибрационных) и омметрах.
Амперметры. Магнитоэлектрический ИМ, включенный в электрическую цепь последовательно с нагрузкой, позволяет измерять силу тока порядка 20...50 мА. Для расширения пределов измерения используют шунты (манганиновый резистор), сопротивление которых мало зависит от температуры. Сопротивление шунта Rш меньше сопротивления прибора Rnp и выбирается из соотношения:
RШ = Rпр/(n-1), (4.10)
где п = I/Iпр — коэффициент шунтирования по току; I — измеряемая сила тока; Iпр — допустимое значение силы тока рамки прибора.
Вольтметры. Магнитоэлектрический механизм, включенный параллельно нагрузке, может использоваться в качестве милливольтметра.
Для расширения пределов измерения по напряжению последовательно с ИМ включают добавочный резистор Rдоб, сопротивление которого больше сопротивления Rnp:
Rдоб = Rnp (m - 1), (4.11)
где т = U/Unp — коэффициент шунтирования по напряжению.
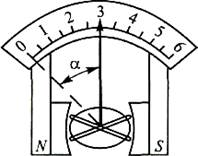
Логометры. Логометры — электромеханические приборы, измеряющие отношение двух электрических величин, обычно двух токов: a=f(I1/I2), что позволяет сделать их показания независимыми в известных пределах от напряжения источника питания. В логометрах вращающий и противодействующий моменты создаются электрическим путем и направлены навстречу друг другу. На рис. 4.3 приведена схема устройства магнитоэлектрического логометра.
В поле постоянного магнита помещена подвижная часть, состоящая из двух жестко закрепленных под определенным углом рамок. Особой формой полюсных наконечников и сердечника, находящегося между ними, искусственно создается в зазоре между ними неравномерное магнитное поле постоянного магнита. Токи к рамкам подводятся через безмоментные токоподводы, не создающие противодействующего момента. Направления токов в рамках логометра выбираются так, чтобы моменты Мвр и Мпр были направлены в разные стороны. Тогда в общем виде можно записать:
Мвр = I1 f1 (a); Мпр = I2 f2 (a), (4.12)
где I1 и I2 - токи в рамках; а — угол отклонения подвижной части от некоторого условного нулевого положения.
Равновесие подвижной части наступает при равенстве моментов Мвр и Мпр, действующих на рамку, т.е. при условии I1 f1 (a) = I2 f2 (a). Откуда
I1 / I2 = f2 (a)/ f1 (a) = f (a) или a = F(I1 / I2). (4.13)
 Омметры. Магнитоэлектрические логометры широко применяют в приборах для измерения сопротивления — омметрах и мегомметрах, в выпрямительных частотомерах и устройствах для измерения неэлектрических величин (температуры, давления, уровня жидкости и др.). На рис. 4.4 приведены схемы магнитоэлектрических омметров с последовательным (см. рис. 4.4, а) и параллельным (см. рис. 4.4, б) включением измеряемого сопротивления. Последовательное включение гх применяется при измерении средних и больших сопротивлений.
Омметры. Магнитоэлектрические логометры широко применяют в приборах для измерения сопротивления — омметрах и мегомметрах, в выпрямительных частотомерах и устройствах для измерения неэлектрических величин (температуры, давления, уровня жидкости и др.). На рис. 4.4 приведены схемы магнитоэлектрических омметров с последовательным (см. рис. 4.4, а) и параллельным (см. рис. 4.4, б) включением измеряемого сопротивления. Последовательное включение гх применяется при измерении средних и больших сопротивлений.
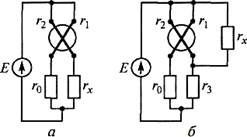 Рис. 4.3. Схема устройства магнито-
Рис. 4.3. Схема устройства магнито-
Электрического логометра.
Рис. 4.4. Схемы устройства магнито-
электрических омметров с логометри-
ческим механизмом для измерения
больших (а) и малых (б) сопротивлений.
r1 и r2 – сопротивления обмоток рамок;
r0 и r3 – известные сопротивления; rх – неизвестное сопротивление.
В первой схеме силы тока в катушках определяются по формулам
I1 = E/(r1 + r0); I2 = E/(r2 + rx), где E – напряжение питания; r1 и r2 – сопротивления обмоток рамок; r0 – известное сопротивление; rх – неизвестное сопротивление.
Тогда согласно (4.13) уравнение преобразования будет иметь вид
a = F[( r2 + rх)/(r1+ r0)]. (4.14)
Из (4.14) видно, что независимо от величины напряжения Е и при постоянных r1, r2 и r0 отклонение подвижной части является однозначной функцией rх и шкала прибора может быть проградуирована в единицах сопротивления.
В приборах с параллельным включением rх (см. рис. 4.4, б) при постоянном напряжении Е сила тока I1не зависит, а сила тока I2 зависит от rх. Отношение токов, а следовательно, и угол а не зависят от напряжения питания и являются однозначной функцией rх, т. е. и здесь шкала может быть проградуирована в омах. Обе схемы обычно объединяют в одном приборе — омметре; переход от одной схемы к другой осуществляется с помощью переключателя.
Логометрические омметры — приборы невысокого класса точности (1, 5; 2, 5; 4, 0). Погрешность омметра указывается в процентах от длины рабочей шкалы.
Аналогично рассмотренному принципу построения логометрического ИМ магнитоэлектрической системы выпускают логометры электромагнитной, электродинамической, ферродинамической и индукционной систем.
Гальванометры постоянного тока. На рис. 4.5 показана схема устройства магнитоэлектрического гальванометра постоянного тока.
Сильный постоянный магнит 2из высококоэрцитивного сплава, полюсные наконечники 5из магнитомягкой стали с цилиндрической расточкой концов и неподвижный стальной цилиндр 7, укрепленный в расточке, служат для создания в зазоре сильного равномерного магнитного поля. В этом зазоре находится рамка 4, укрепленная на подвесе 7, к которой через безмоментные токоподводы 6подводится ток. На оси рамки закреплено зеркальце 3для оптического отсчета угла отклонения рамки от нулевого положения.
На рамку при подаче тока I действуют моменты: вращающий Мвр, (4.1), противодействующий Мпр, создаваемый при закручивании подвеса (4.2), и успокоения Мусп (4.3).
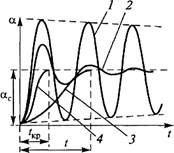
| Рис. 4.6. Режимы движения подвижной части гальванометра: 1 — колебательный; 2 — установившегося равновесия; 3 — апериодический; 4 — критический |
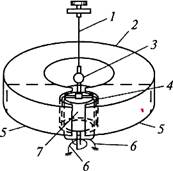
Рис. 4.5. Схема устройства магнитоэлектрического гальванометра:
1 — подвес; 2 — постоянный магнит; 3 — зеркальце; 4 — рамка; 5 — полюсные наконечники; 6 — безмоментные токоподводы; 7 — стальной цилиндр
График функции a = f (t) для различных значений сопротивления нагрузки приведен на рис. 4.6.
При RBH = ∞ колебания подвижной части гальванометра будут постепенно, хотя и медленно, затухать из-за трения подвижной рамки о воздух (кривая 1). Режим движения рамки для этого случая будет колебательным.
При RKp < RBH < ∞ подвижная часть совершает затухающие колебательные движения около положения установившегося равновесия, определяемого углом a с (кривая 2).
При RBH < RKp режим движения рамки гальванометра будет апериодическим (кривая 3).
При RBH ≈ RKp подвижная часть приходит в режим устойчивого равновесия без колебаний и за минимальное время (кривая 4). Этот режим называется критическим. Величина критического сопротивления RKp определяет возможность применения гальванометра и его всегда указывают на шкале прибора.
К метрологическим характеристикам относятся:
чувствительность, период собственных колебаний,
внешнее и полное критическое сопротивление.
Применение: гальванометры используют для измерения малых токов (10-5... 10-12 А) и
напряжений (до 10-4 В) в качестве нуль-индикаторов.