Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
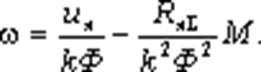
Регулирование скорости ДПТ с н.в. ослаблением поля двигателя. Электромеханическая и механическая характеристики.
|
|
 Регулирование по посредством ослабления поля производится либо путем шунтирования обмотки возбуждения некоторым сопротивлением, либо уменьшением числа включенных в работу витков обмотки возбуждения. В последнем случае должны быть предусмотрены соответствующие выводы из обмотки возбуждения. Уравнения электромеханической характеристики в осях α, β имеют вид:
Регулирование по посредством ослабления поля производится либо путем шунтирования обмотки возбуждения некоторым сопротивлением, либо уменьшением числа включенных в работу витков обмотки возбуждения. В последнем случае должны быть предусмотрены соответствующие выводы из обмотки возбуждения. Уравнения электромеханической характеристики в осях α, β имеют вид:

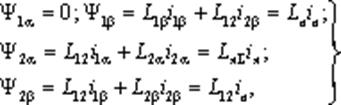 Обмотка дополнительных полюсов и компенсационная обмотка в процессе электромеханического преобразования энергии не участвуют. Компенсационная обмотка (КО) компенсирует МДС поперечной реакции якоря, а обмотка дополнительных полюсов (ДП) создает в зоне коммутации тока в проводниках обмотки якоря магнитное поле такой величины и направления, при которых процесс коммутации протекает благоприятно. Выражения для потокосцеплений имеют вид:
Обмотка дополнительных полюсов и компенсационная обмотка в процессе электромеханического преобразования энергии не участвуют. Компенсационная обмотка (КО) компенсирует МДС поперечной реакции якоря, а обмотка дополнительных полюсов (ДП) создает в зоне коммутации тока в проводниках обмотки якоря магнитное поле такой величины и направления, при которых процесс коммутации протекает благоприятно. Выражения для потокосцеплений имеют вид:
Lв–индуктивность обм.возбужд.;
Lя Σ –суммарная индуктивность рассеяния обмоток якоря (ОЯ),
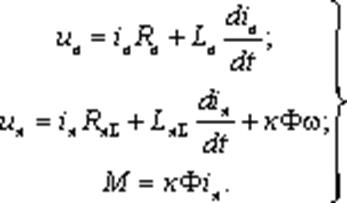 R я Σ –сопротивление, включающее в себя все сопротивления якорной цепи машины. С учетом последних выражений, система уравнений механической характеристики будет иметь вид: ----------------------------------à
R я Σ –сопротивление, включающее в себя все сопротивления якорной цепи машины. С учетом последних выражений, система уравнений механической характеристики будет иметь вид: ----------------------------------à
Для машины пт с н.в.м уравнения статических электромеханической и механической характеристик получим, полагая: