Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Структурный принцип образования механизмов. Группы Ассура
|
|
ЛЕКЦИЯ 2
Краткое содержание
Структурная схема механизма. Кинематическая схема механизма. Определения степени подвижности механизма. Структурный принцип образования механизмов. Начальный механизм. Группы Ассура. Структурный анализ механизма. Примеры.
Структурная схема механизма – это безмасштабное графическое изображение механизма с применением условных обозначений звеньев и кинематических пар.
Кинематическая схема механизма – это структурная схема, выполненная в масщтабе.
Степень подвижности механизмов
Степень подвижности механизма W - это количество независимых движений, которые нужно подвести к механизму, чтобы на выходе получить одно или наоборот.
Для плоских механизмов применяется формула Чебышева:
W = 3n - 2p1 - p2, (2.1)
где n – число подвижных звеньев механизма;
p1 - число одноподвижных кинематических пар;
p2 - число двухподвижных кинематических пар.
В пространственных механизмах степень подвижности определяется по формуле Сомова-Малышева:
W = 6n - 5p1 - 4p2 - 3p3 - 2p4 - p5, (2.2)
где р3 - число трёхподвижных кинематических пар;
р4 - число четырёхподвижных кинематических пар;
р5 - число пятиподвижных кинематических пар.
Большинство механизмов имеют степень подвижности W=1. Их называют рациональными. Эти механизмы не чувствительны к погрешностям монтажа, изготовления и деформирования. Такие механизмы не требуют приработки.
У дифференциальных зубчатых механизмов W=2, у роботов и манипуляторов W=4-8, у основного механизма экскаватора W=4. Если W=0, то получим неподвижную конструкцию – ферму.
Структурный принцип образования механизмов. Группы Ассура
Основной принцип образования механизмов был впервые сформулирован в 1916 году русским учёным Леонидом Владимировичем Ассуром - профессором Петербургского политехнического института.
Согласно идее Л.В.Ассура любой механизм образуется последовательным присоединением к ведущим звеньям и стойке кинематических цепей, удовлетворяющих условию, что степень их подвижности W=0.
Ведущее звено, входящее в одноподвижную кинематическую пару со стойкой образует начальный механизм. (рис.2.1 а, б).
Ведущим звеном может быть как кривошип, так и ползун. Начальному механизму присваивается 1 класс. Степень подвижности начального механизма W =1.


а). б).
Рис.2.1
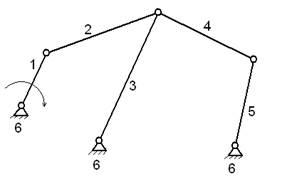
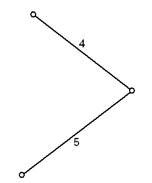
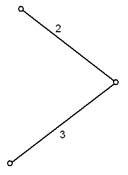 Кинематические цепи, у которых степень подвижности W=0, называются группами Ассура.
Кинематические цепи, у которых степень подвижности W=0, называются группами Ассура.
| |||||
| |||||
| |||||

Начальный Группа Ассура Группа Ассура Механизм
механизм II класс II класс
1 класс