Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Хід роботи. Тема: Розрахунок регулятора в лінійних системах управління (ч.3)
|
|
ЛАБОРАТОРНА РОБОТА №3
Тема: Розрахунок регулятора в лінійних системах управління (ч.3)
Мета: навчитися виконувати розрахунок параметрів регулятора за заданими умовами; навчитися моделювати лінійні технологічні процеси та знаходити оптимальні налаштування регулятора, що задовольняють умовам управління.
Обладнання і матеріали:
¾ персональний комп’ютер з операційною системою Windows;
¾ програмне забезпечення Matlab;
¾ офісний пакет програм Microsoft Office.
Контрольні питання:
1. Що таке закон регулювання?
2. Що таке якість управління?
3. Обґрунтувати класифікацію регуляторів?
4. Що таке насоси та вказати основні технологічні характеристики насосів?
5. Вказати види насосів та обґрунтувати їх.
Хід роботи
1. Дані для виконання лабораторної роботи беремо з ЛР№2 згідно варіанту.
Задачу формування бажаної ЛАЧХ формулюємо наступним чином: забезпечити максимально широку полосу пропускання (максимальна швидкодія) при відсутності коливань рівня води.
2. В пакеті Matlab задаємо перехідну функцію об’єкта управління висотою води в баку, ввівши в командну строчку
3. Who = tf ([Кho], [Tho 1 0]),
та попередньо, регулятора
Kph = tf(1).
4. В командний рядок введемо команду Sisotool.
5. Для контролю перерегулювання та тривалості перехідного процесу відкриємо вікно Step Response для LTI Viewer for SISO Design Task.
6. У вікні Open-Loop Bode Editor (рис.3.1) корегуємо ЛАЧХ розімкнутого контуру так, щоб забезпечити максимальну швидкодію при відсутності перерегулювання (рис.3.2).
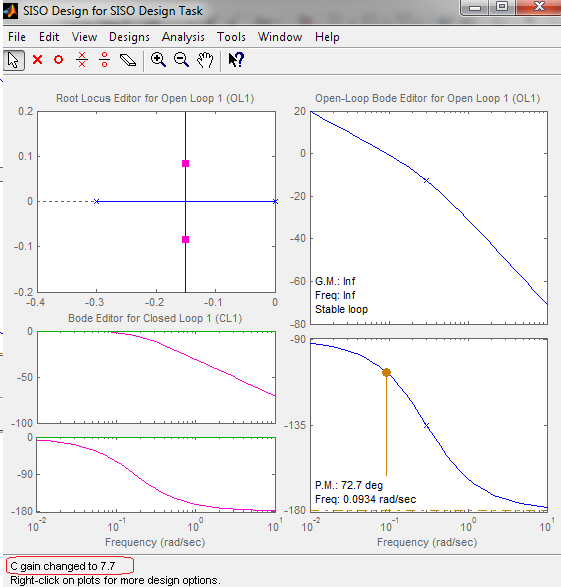
Рисунок 3.1 Формування бажаної ЛАЧХ контуру регулювання висоти води в баку.
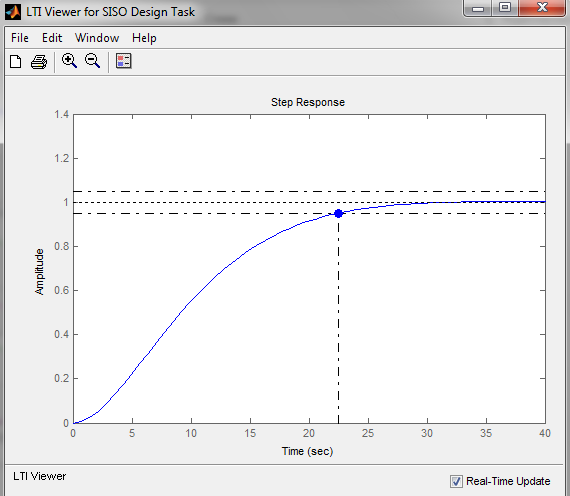
Рисунок 3.2 Перехідна функція контуру регулювання висоти види в баку.
7. Після корекції ЛАЧХ розімкнутого контуру за допомогою додатка Sisotool (рис.3.1, рис.3.2) отримаємо коефіцієнт передачі регулятора рівня води в баку Kph = 7.7 (рис.3.1).
На рис.3.2 представлений графік перехідного процесу в системі. Як видно з графіку, час заповнення баку водою до заданого рівня відбувається приблизно за 30-35с. Коливання відсутні.
8. При моделюванні не було враховано, що кут відкриття засувки не може перевищувати  тобто в системі є важлива нелінійна ланка типу обмежувача.
тобто в системі є важлива нелінійна ланка типу обмежувача.
Додаємо таку ланку в структурну схему системи, обмежуючи вихід регулятора рівня води в баку Kph, та подивимося, як це позначиться на тривалості перехідного процесу.
9. Структурна схема моделі системи заповнення баку водою з обмежувачем кута повороту заслінки представлена на рис.3.3.

Рисунок 3.3 Структурна схема моделі системи заповнення бака речовиною з обмеженням кута повороту заслінки.
На рис.3.4 зображений графік перехідного процесу в контурах регулювання положення заслінки jр та рівня води в баку h при обмеженні кута повороту заслінки на рівні.

Рисунок 3.4 Графік перехідного процесу в системі заповнення бака речовиною з урахуванням обмеження кута повороту заслінки.
10. Система, синтезована подібним чином, стійка, забезпечує заповнення бака водою без переливу. Навіть з урахуванням часу відкриття заслінки, бак заповнюється водою на 99% протягом 200 с, що відповідає вимогам завдання.
11. Скласти звіт та зробити висновки.
|