Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Порядок проведення роботи
|
|
Стенд №1
1. Увімкнути кнопку 15 «Вентилятор» (рис. 1.5). і регулятором 18 установити мінімальну швидкість обертів крильчатки.
2. Включити два пакетні вимикачі живлення стенду (із середини щита).
3. Увімкнути кнопку 14 на щиті «ТРМ 138».
4. Натиснути кнопку  , на панелі приладу «ТРМ 138» (рис. 1.6), прилад почне опитувати почергово вісім каналів. По черзі будуть говіти один з восьми світлових індикаторів 5, а в цей час інші світлові індикатори будуть миготіти.
, на панелі приладу «ТРМ 138» (рис. 1.6), прилад почне опитувати почергово вісім каналів. По черзі будуть говіти один з восьми світлових індикаторів 5, а в цей час інші світлові індикатори будуть миготіти.
5. Коли з восьми індикаторів на певний час буде постійно горіти індикатор з цифрою «2» повторно натиснути кнопку . На індикаторі 1 висвітиться поточне значення температури в об’єкті, на індикаторі 2 – задане її значення, а другий індикатор каналів 5 горітиме постійним свіченням.
6. Натиснути кнопку  і тримати 3-5 с., поки на табло 2 висвітиться «PL-0». Ми зашли в меню конфігурування приладу.
і тримати 3-5 с., поки на табло 2 висвітиться «PL-0». Ми зашли в меню конфігурування приладу.
7. Натиснути два рази кнопку  на табло 2 повинно висвітиться «PL-2». Після цього короткочасно натиснути кнопку (далі всюди на кнопки натискати короткочасно). На табло 2 повинно висвітиться «CPr 1» - ми зайшли в пункт налаштування виконавчих механізмів.
на табло 2 повинно висвітиться «PL-2». Після цього короткочасно натиснути кнопку (далі всюди на кнопки натискати короткочасно). На табло 2 повинно висвітиться «CPr 1» - ми зайшли в пункт налаштування виконавчих механізмів.
8. Натиснути кнопку  на табло 2 повинно висвітиться «CPr 2». Натиснути кнопку . На табло 1 висвітиться поточне задане значення, а на табло 2 буде мигати напис «C.SP».
на табло 2 повинно висвітиться «CPr 2». Натиснути кнопку . На табло 1 висвітиться поточне задане значення, а на табло 2 буде мигати напис «C.SP».
9. Натиснути кнопку - тепер буде мигати задане значення на табло 1. Кнопкою збільшити це значення до 70 0С і натиснути кнопку - почне знову мигати напис «C.SP».
10. Натиснути 2 рази кнопку  - вихід з меню конфігурування, до появи на табло 1 дійсного значення температури, а на табло 2 заданого значення температури.
- вихід з меню конфігурування, до появи на табло 1 дійсного значення температури, а на табло 2 заданого значення температури.
11. Увімкнути живлення комп’ютера. На робочому столі запустити ярлик програми «Монитор». В вікні, що відкрилося, під зображенням приладу ТРМ 138 натиснути на кнопку «Позиційне регулювання». На моніторі з’явиться розмітка графіка і значення температури: червоним свіченням для більшої ємності, а зеленим для меншої ємності.
12. Увімкнути кнопку 16 «Нагрів» (рис. 1.5).
13. Через кожні 20 с по табло 1 або монітору 7 комп’ютера визначати температури в об’єкті за двох його ємностей – більшої по червоному табло монітора, а меншої по – зеленому.
14. Результати записати в табл.1.1 і табл.1.2.
15. Якщо температура в об’єкті досягне максимального значення, експеримент закінчити.
16. Після завершення експерименту вимкнути кнопкою 16 «Нагрів».
17. Регулятором 18 установити максимальну швидкість крильчатки
вентилятора.
18. Після охолодження об’єкта досліджень до кімнатної температури повторити експеримент, починаючи з п.12 до п.16.
19. За результатами експериментів побудувати два графіка кривих розгону
за різних властивостей теплового об’єкта (навантаження та ємності).
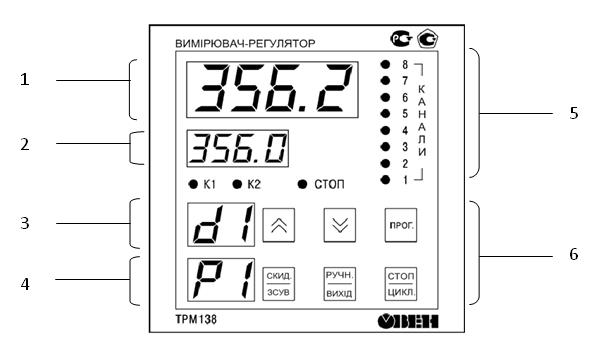
Рис. 1.6. Лицьова панель приладу ТРМ 138
Стенд №4
1. Увімкнути кнопку 15 «Вентилятор» і регулятором 18 установити мінімальну швидкість обертів крильчатки.
2. Включити два пакетні вимикачі живлення стенду (із зворотного боку щита).
3. Натиснути кнопку 13 на щиті «Позиційний регулятор» (рис. 1.5).
4. На верхньому табло (рис. 1.7) з’явиться поточне значення температури, а на нижньому табло - задане його значення (температура в приміщені).
5. Натиснути кнопку  на панелі регулятора, поки старша цифра завдання на табло 5 почне мерехтіти.
на панелі регулятора, поки старша цифра завдання на табло 5 почне мерехтіти.
6. Кнопкою збільшити це значення до 70 0С (використовувати кнопку для переходу між цифрами на табло).
7. Натиснути кнопку  на панелі регулятора, поки мерехтіння цифри значення завдання припиниться.
на панелі регулятора, поки мерехтіння цифри значення завдання припиниться.
8. Увімкнути живлення комп’ютера. На робочому столі запустити ярлик програми «Монитор». В вікні, що відкрилося, під зображенням приладу ТЭРА натиснути на кнопку «Позиційне регулювання». На моніторі з’явиться розмітка графіка і значення температури: червоним свіченням для більшої ємності, а зеленим для меншої ємності.
9. Увімкнути 16 «Нагрів».
10. Через кожні 20 с. по верхньому табло або монітору 7 комп’ютера визначати температури в об’єкті.
11. Завершення експерименту. Вимкнути кнопкою 16 «Нагрів».
12. Регулятором 18 установити максимальну швидкість крильчатки вентилятора.
13. Після охолодження об’єкта досліджень до кімнатної температури повторити експеримент, починаючи з п.9 до п.11 порядку проведення роботи.
За результатами експериментів побудувати на одній і тій же самій системі координат два графіка кривих розгону за різних властивостей теплового об’єкта (швидкості роботи вентилятора). Визначити сталі часу об’єкта Т0, коефіцієнти передачі  , самовирівнювання, час перехідного процесу. Записати рівняння динаміки з урахуванням одержаних результатів. Зробити висновок.
, самовирівнювання, час перехідного процесу. Записати рівняння динаміки з урахуванням одержаних результатів. Зробити висновок.
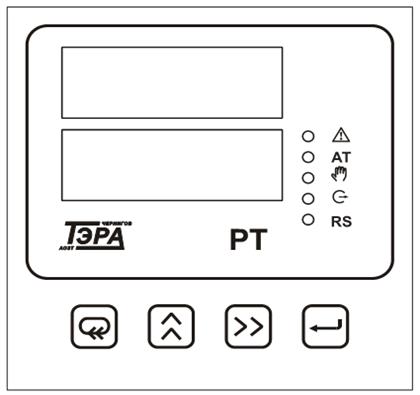
Рис. 1.7. Передня панель приладу РТ.
Табл. 1.1.
Результати зміни температури за мінімального навантаження теплового об’єкта з інтервалом у 20с.
| Ємність об’єкта менша | Температура, 0C | |||||||
| Ємність об’єкта більша | Температура, 0C | |||||||
Табл. 1.2.
Результати зміни температури за максимального навантаження теплового об’єкта з інтервалом у 20с.
| Ємність об’єкта менша | Температура, 0C | |||||||
| Ємність об’єкта більша | Температура, 0C | |||||||
Контрольні запитання:
1. Що таке об’єкт управління?
2. Що називається статичною характеристикою об’єкта, методика її одержання?
3. Що називається динамічною характеристикою об’єкта, методика одержання?
4. Як утворюється ємність об’єктів?
5. Що називається самовирівнюванням об’єкта?
6. Який вигляд мають рівняння динаміки статичного і астатичного об’єктів?
7. Які параметри об’єкта можна визначити за його статичною і динамічною характеристиками?
Лабораторна робота № 2
ВИВЧЕННЯ І ДОСЛІДЖЕННЯ АВТОМАТИЧНОЇ СИСТЕМИ ПОЗИЦІЙНОГО РЕГУЛЮВАННЯ
(Стенди № 1 і 4)
Мета роботи – вивчити і дослідити принцип позиційного регулювання автоматичних систем, вплив властивостей об’єкта управління та настроювань регулятора на показники якості регулювання.
2.1. Загальні положення
Позиційними називаються такі системи регулювання, у яких регулюючий орган (клапан, заслінка тощо) може займати практично миттєво визначені фіксовані положення. В залежності від кількості таких положень розрізняють дво-, три- та багатопозиційні системи регулювання.
Позиційними називаються регулятори, у яких переміщення регулюючого органу відбувається тільки за відповідними відхиленнями значення регульованого параметра від заданої величини. Регулюючий орган позиційного регулятора може займати обмежену кількість фіксованих положень (позицій), причому його переміщення із одного положення в інше відбувається з такою високою швидкістю, що може вважатися миттєвим.
Позиційні регулятори є різновидом астатичних регуляторів, коли стала часу Тp регулятора досить мала порівняно із сталою часу Т0 об’єкта.
Найбільше поширення мають двопозиційні регулятори, у яких вихідна величина може приймати тільки два значення: мінімальне та максимальне. Інколи такі пристрої називають регуляторами релейної дії. Статичні характеристики релейного регулятора наведено на рис. 2.1.
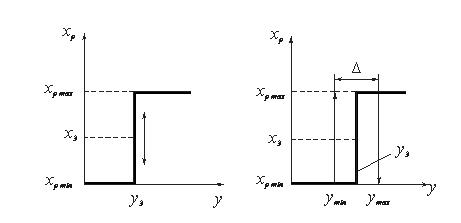
Рис. 2.1. Статичні характеристики двопозиційного регулятора: а - без зони нечутливості; б - із зоною нечутливості ∆
Коли регулятор працює без зони нечутливості (рис. 2.1, а), то переміщення регулюючого органу відбувається в момент переходу параметром заданого значення у3. Робота ідеального регулятора у цьому випадку подається у вигляді:
xp = 0 при у > у3;
xp = xp max при у < у3
Характеристика регулятора із зоною нечутливості Δ (рис. 2.1, б) описується так:
xp = 0 при у > у3 +Δ /2
xp = xp max при у < у3 –Δ /2.
В інтервалі у3 –Δ /2 < у < у3 + Δ /2 величина xp може приймати два значення (0 та xp max) залежно від попередніх значень y. Перехід з нижньої гілки на верхню відбувається за умовами:
y = у3 + Δ /2; xp = 0; dy / d τ > 0,
а з верхньої гілки на нижню – за умовами:
y = у3 –Δ /2; xp = xpmax; dy / d τ < 0.
Регулятор настроюється так, щоб у разі переключення регулюючого органу в положення xp.max регулююче діяння свідомо перевищувало б дію збурення. В результаті відхилення регульованого параметра починає зменшуватися, однак регулюючий орган залишається в тому самому положенні, поки відхилення регульованого параметра не досягне верхнього значення настройки регулятора уmax. Тоді регулююче діяння на об’єкт зменшиться до мінімального значення xp.min. Через переважаючу дію збурення відхилення регульованого параметра знов почне зростати.
Таким чином, в АСР із двопозиційним регулятором регульований параметр здійснює незатухаючі коливання.Амплітуда і період цих коливань залежать від діапазону настройки регулятора уmаx - уmin= Δ, а також від властивостей об’єкта регулювання і збільшуються із зростанням інерційності та запізнювання об’єкта.
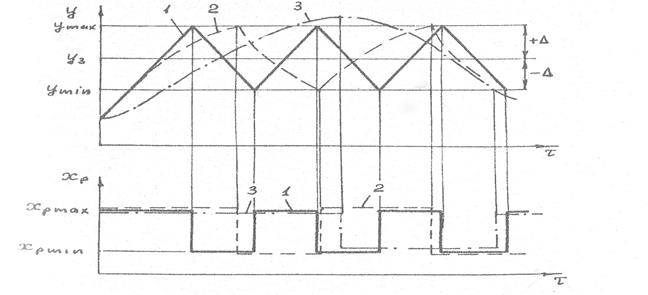
Рис. 2.2. Перехідні процеси в АСР з двопозиційним регулятором і зоною нечутливості ∆: 1- астатичним об’єктом першого порядку; 2- статичним об’єктом першого порядку; 3- статичним об’єктом із запізнюванням.
Релейні регулятори доцільно застосовувати на об'єктах з великою сталою часу То і малим запізнюванням τ 3, які задовольняють нерівність 0< τ 3/То < 0, 2. Ці регулятори нескладні в обслуговуванні, надійні в роботі, прості за конструкцією та настройкою. Але вибираючи тип регулятора, потрібно враховувати низьку якість позиційного регулювання.