Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Апериодическое звено первого порядка.
|
|
Лабораторная работа №1
По дисциплине: Теория автоматического управления
Вариант №10
Выполнил: студ. ЭЭФ,
гр.ЭЭ-31 Кондратьев С.А.
Проверил: Волков С.В.
Йошкар–Ола, 2015г.
ХАРАКТЕРИСТИКИ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
Цель работы: приобретение практических навыков, необходимых при исследовании динамических характеристик, а также закрепление теоретических знаний по переходным процесса в звеньях систем регулирования.
С помощью средств Scilab (xCos) построить:
1) Переходную функцию h(t);
2) Функцию веса w(t).
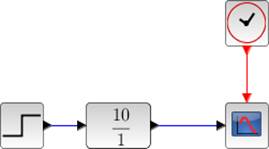
Безынерционное (пропорциональное) звено.
Передаточная функция звена имеет вид:

K = n, где n – номер варианта.
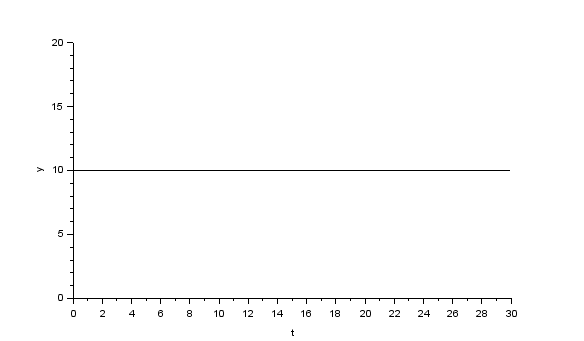
1) Переходная функция h(t):
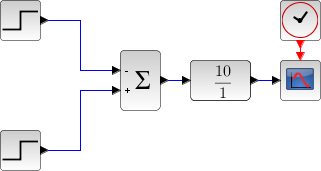
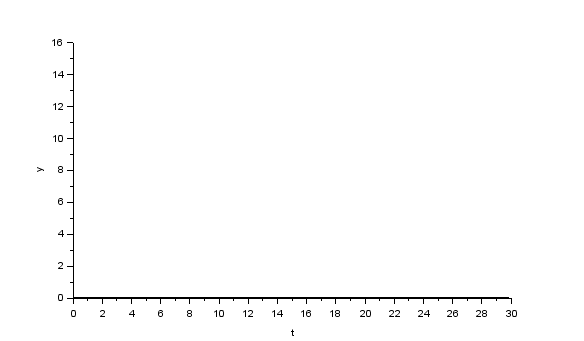
2) Функция веса w(t):
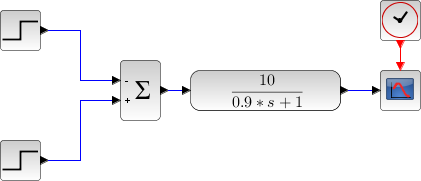
Апериодическое звено первого порядка.
Передаточная функция звена имеет вид:

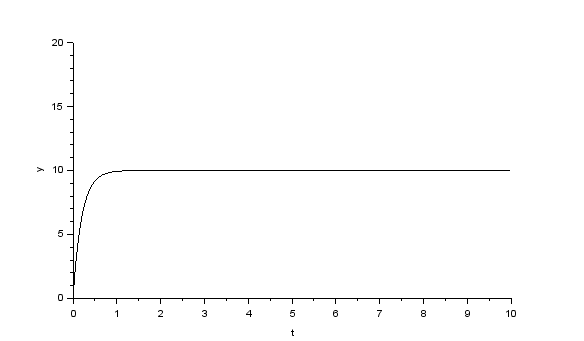
а) [K=n, T=0, 2],
1) Переходная функция h(t):
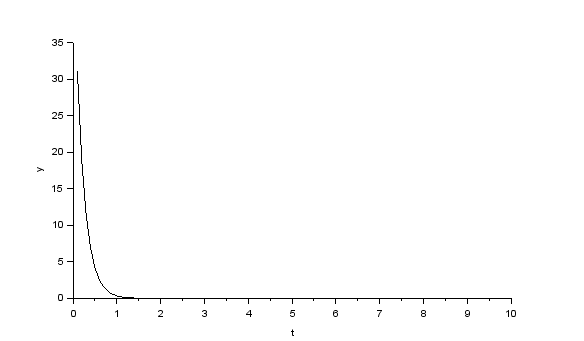
2) Функция веса w(t):

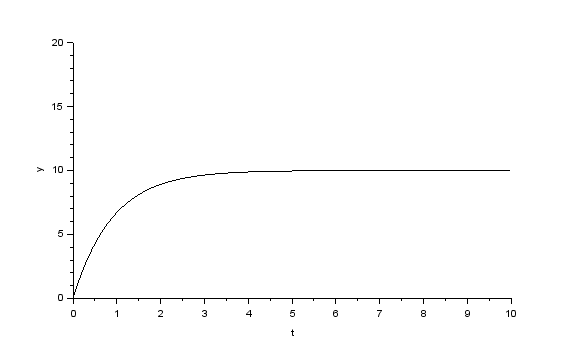
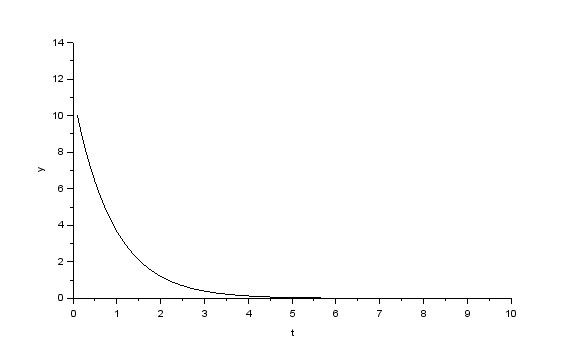
б) [K=n, T=0, 9], где n – номер варианта.

1) Переходная функция h(t):

2) Функция веса w(t):
|