Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Алгоритм определения координат
|
|
Для определения координат потребителя необходимо знать координаты спутников (не менее 4) и дальность от потребителя до каждого видимого спутника. Для того, чтобы потребитель мог определить координаты спутников, излучаемые ими навигационные сигналы моделируются сообщениями о параметрах их движения. В аппаратуре потребителя происходит выделение этих сообщений и определение координат спутников на нужный момент времени.
Координаты и составляющие вектора скорости меняются очень быстро, поэтому сообщения о параметрах движения спутников содержат сведения не об их координатах и составляющих вектора скорости, а информацию о параметрах некоторой модели, аппроксимирующей траекторию движения КА на достаточно большом интервале времени (около 30 минут). Параметры аппроксимирующей модели меняются достаточно медленно, и их можно считать постоянными на интервале аппроксимации.
Параметры аппроксимирующей модели входят в состав навигационных сообщений спутников. В системе GPS используется Кеплеровская модель движения с оскулирующими элементами. В этом случае траектория полёта КА разбивается на участки аппроксимации длительностью в один час. В центре каждого участка задаётся узловой момент времени, значение которого сообщается потребителю навигационной информации. Помимо этого, потребителю сообщают параметры модели оскулирующих элементов на узловой момент времени, а также параметры функций, аппроксимирующих изменения параметров модели оскулирующих элементов во времени как предшествующем узловому элементу, так и следующем за ним.
В аппаратуре потребителя выделяется интервал времени между моментом времени, на который нужно определить положение спутника, и узловым моментом. Затем с помощью аппроксимирующих функций и их параметров, выделенных из навигационного сообщения, вычисляются значения параметров модели оскулирующих элементов на нужный момент времени. На последнем этапе с помощью обычных формул кеплеровской модели определяют координаты и составляющие вектора скорости спутника.
В системе Глонасс для определения точного положения спутника используются дифференциальные модели движения. В этих моделях координаты и составляющие вектора скорости спутника определяются численным интегрированием дифференциальных уравнений движения КА, учитывающих конечное число сил, действующих на КА. Начальные условия интегрирования задаются на узловой момент времени, располагающийся посередине интервала аппроксимации. Для определения координат потребителя необходимо знать координаты спутников и дальность от потребителя до каждого видимого спутника, которая определяется в навигационном приёмнике [4] с точностью около 1 м. Для удобства рассмотрим простейший " плоский" случай, представленный на рис. *.
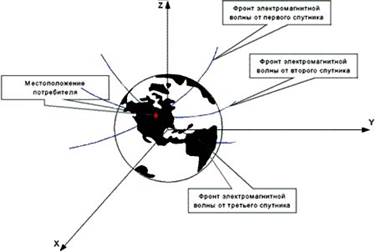
Рисунок 3 – Определение координат потребителя
Каждый спутник можно представить в виде точечного излучателя. В этом случае фронт электромагнитной волны будет сферическим. Точкой пересечения двух сфер будет та, в которой находится потребитель. Высота орбит спутников составляет порядок 20000 км. Следовательно, вторую точку пересечения окружностей можно отбросить из-за априорных сведений, так как она находится далеко в космосе. Спутниковые навигационные системы позволяют потребителю получить координаты с точностью порядка 10–15 м. Однако для многих задач, особенно для навигации в городах, требуется большая точность. Один из основных методов повышения точности определения местонахождения объекта основан на применении известного в радионавигации принципа дифференциальных навигационных измерений.
Дифференциальный режим DGPS (Differential GPS) позволяет установить координаты с точностью до 3 м в динамической навигационной обстановке и до 1 м - в стационарных условиях. Дифференциальный режим реализуется с помощью контрольного GPS-приёмника, называемого опорной станцией. Она располагается в пункте с известными координатами, в том же районе, что и основной GPS-приёмник. Сравнивая известные координаты (полученные в результате прецизионной геодезической съёмки) с измеренными, опорная станция вычисляет поправки, которые передаются потребителям по радиоканалу в заранее оговоренном формате.
Аппаратура потребителя принимает от опорной станции дифференциальные поправки и учитывает их при определении местонахождения потребителя. Результаты, полученные с помощью дифференциального метода, в значительной степени зависят от расстояния между объектом и опорной станцией. Применение этого метода наиболее эффективно, когда преобладающими являются систематические ошибки, обусловленные внешними (по отношению к приёмнику) причинами. По экспериментальным данным, опорную станцию рекомендуется располагать не далее 500 км от объекта. В настоящее время существуют множество широкозонных, региональных и локальных дифференциальных систем.