Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Функциональная схема РЛС кругового обзора
|
|
Радиолокация – область радиотехники, обеспечивающая радиолокационное наблюдение различных объектов, то есть их обнаружение, измерение координат и параметров движения, а также выявление некоторых структурных или физических свойств путем использования отраженных или переизлученных объектами радиоволн либо их собственного радиоизлучения. Информация, получаемая в процессе радиолокационного наблюдения, называется радиолокационной. Радиотехнические устройства радиолокационного наблюдения называются радиолокационными станциями (РЛС) или радиолокаторами. Сами же объекты радиолокационного наблюдения именуются радиолокационными целями или просто целями. При использовании отраженных радиоволн радиолокационными целями являются любые неоднородности электрических параметров среды (диэлектрической и магнитной проницаемостей, проводимости), в которой распространяется первичная волна. Сюда относятся летательные аппараты (самолеты, вертолеты, метеорологические зонды и др.), гидрометеоры (дождь, снег, град, облака и т. д.), речные и морские суда, наземные объекты (строения, автомобили, самолеты в аэропортах и др.), всевозможные военные объекты и т. п. Особым видом радиолокационных целей являются астрономические объекты.
Источником радиолокационной информации является радиолокационный сигнал. В зависимости от способов его получения различают следующие виды радиолокационного наблюдения.
1. Радиолокация с пассивным ответом, основанная на том, что излучаемые РЛС колебания – зондирующий сигнал – отражаются от цели и попадают в приемник РЛС в виде отраженного сигнала. Такой вид наблюдения иногда называют также активной радиолокацией с пассивным ответом.
2. Радиолокация с активным ответом, именуемая активной радиолокацией с активным ответом, характеризуется тем, что ответный сигнал является не отраженным, а переизлученным с помощью специального ответчика – ретранслятора. При этом заметно повышается дальность и контрастность радиолокационного наблюдения.
3. Пассивная радиолокация основана на приеме собственного радиоизлучения целей, преимущественно миллиметрового и сантиметрового диапазонов. Если зондирующий сигнал в двух предыдущих случаях может быть использован как опорный, что обеспечивает принципиальную возможность измерения дальность и скорости, то в данном случае такая возможность отсутствует.
Систему РЛС можно рассматривать как радиолокационный канал наподобие радиоканалов связи или телеметрии. Основными составными частями РЛС являются передатчик, приемник, антенное устройство, оконечное устройство.
Главные этапы радиолокационного наблюдения – это обнаружение, измерение, разрешение и распознавание.
Обнаружением называется процесс принятия решения о наличии целей с допустимой вероятностью ошибочного решения.
Измерение позволяет оценить координаты целей и параметры их движения с допустимыми погрешностями.
Разрешение заключается в выполнении задач обнаружения и измерения координат одной цели при наличии других, близко расположенных по дальности, скорости и т. д.
Распознавание дает возможность установить некоторые характерные признаки цели: точечная она или групповая, движущаяся или групповая и т. д.
Радиолокационная информация, поступающая от РЛС, транслируется по радиоканалу или по кабелю на пункт управления. Процесс слежения РЛС за отдельными целями автоматизирован и осуществляется с помощью ЭВМ.
Навигация самолетов по трассе обеспечивается посредством таких же РЛС, которые применяются в УВД. Они используются как для контроля выдерживания заданной трассы, так и для определения местоположения в процессе полета.
Для выполнения посадки и ее автоматизации наряду с радиомаячными системами широко используются РЛС посадки, обеспечивающие слежение за отклонением самолета от курса и глиссады планирования.
В гражданской авиации используют также ряд бортовых радиолокационных устройств. Сюда, прежде всего, относится бортовая РЛС для обнаружения опасных метеообразований и препятствий. Обычно она же служит для обзора земли с целью обеспечения возможности автономной навигации по характерным наземным радиолокационным ориентирам.
Радиолокационные системы (РЛС) предназначены для обнаружения и определения текущих координат (дальности, скорости, угла места и азимута) отраженных объектов. РЛС излучает электромагнитную энергию и обнаруживает эхо-сигналы, приходящие от отраженных объектов, а так же определяет их характеристики.
Рассмотрим работу импульсной активной РЛС обнаружения воздушных целей для управления воздушным движением (УВД), структура которого приведена на рисунке 1. Устройство управления обзором (управление антенной) служит для просмотра пространства (обычно кругового) лучом антенны, узким в горизонтальной плоскости и широким в вертикальной.
В рассматриваемой РЛС используется импульсный режим излучения, поэтому в момент окончания очередного зондирующего радиоимпульса единственная антенна переключается от передатчика к приемнику и используется для приема до начала генерации следующего зондирующего радиоимпульса, после чего антенна снова подключается к передатчику и так далее.
Эта операция выполняется переключателем прием-передача (ППП). Пусковые импульсы, задающие период повторения зондирующих сигналов и синхронизирующие работу всех подсистем РЛС, генерирует синхронизатор. Сигнал с приемника после аналого-цифрового преобразователя (АЦП) поступает на аппаратуру обработки информации – процессор сигналов, где выполняется первичная обработка информации, состоящая в обнаружении сигнала и изменении координат цели. Отметки целей и трассы траекторий формируются при первичной обработке информации в процессоре данных.
Сформированные сигналы вместе с информацией об угловом положении антенны передаются для дальнейшей обработки на командный пункт, а также для контроля на индикатор кругового обзора (ИКО). При автономной работе радиолокатора ИКО служит основным элементом для наблюдения воздушной обстановки. Такая РЛС, обычно ведет обработку информации в цифровой форме. Для этого предусмотрено устройство преобразования сигнала в цифровой код (АЦП).
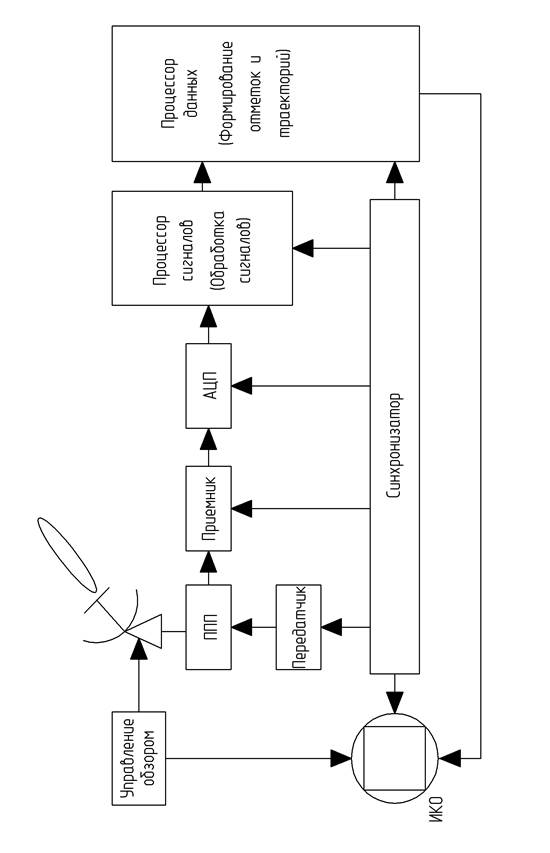
Рисунок 1. Функциональная схема РЛС кругового обзора [4, стр.16]