Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Принцип частотного регулирования
|
|
Самостоятельная работа № 10
Тема занятия: «Управляемые инверторы и преобразователи»
Учебные вопросы
1. Преобразователь напряжения с регулируемой частотой для трехфазного асинхронного электродвигателя.
2. Принцип частотного регулирования.
3. Принцип работы регулируемого преобразователя.
Литература
1. Бушуев В. М., Деминский В. А. Электропитание устройств и сис-тем телекоммуникаций: учеб. пособие для вузов. - М.: Горячая линия - Телеком, 2011. - с. 224 – 281.
Преобразователь напряжения с регулируемой частотой для трехфазного асинхронного электродвигателя
В электроприводах технологических установок получили широкое применение асинхронные трехфазные двигатели. Если необходимо изменять частоту вращения ротора такого двигателя, то его следует питать трехфазным током с регулируемыми частотой и (по связному с ней закону) эффективным значением напряжения. В предлагаемой работе рассказывается о преобразователе, формирующем регулируемое по частоте и амплитуде трехфазное напряжение из однофазного, поступающего от сети 220В, 50 Гц. Задачи, решаемые модулем управления преобразователя, разделены между двумя микроконтроллерами серии PIC 16, а силовой модуль построен на микросхеме IR21131, специально предназначенной для использования в трехфазных инверторах, и мощных биполярных транзисторах с изолированным затвором (IGBT – Insulated Gate Bipolar Transistor).
Варианты подобных конструкций обладают сравнительно большим интервалом регулирования частоты вращения, а в конструкции для регулирования напряжения применен автотрансформатор. В предлагаемом преобразователе использован алгоритм формирования трехфазного напряжения по базовым векторам с регулированием выходного напряжения путем широтно-импульсной модуляции (ШИМ).
Принцип частотного регулирования
Трехфазная система обмоток статора двигателя создает магнитное поле, вращающееся с угловой частотой
 ,
,
где f – частота питающего напряжения, Гц;
р – число пар полюсов статора.
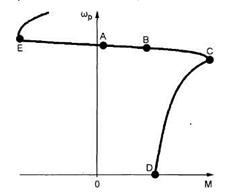
Поле пересекает витки обмоток ротора, наводя в них ЭДС, под воздействием которой в них протекает ток. Взаимодействуя с полем статора, он создает вращающий момент. При постоянной частоте вращения поля двигатель обладает механической характеристикой, изображенной на рисунке 1, где ω р 0 угловая скорость вращения ротора, М – момент вращения на валу. Буквами обозначены точки: А – режим холостого хода, В – номинальный режим, С – режим максимально возможного (критического) момента, D – начало пускового режима. Участок А-Е – рекуперативное торможение.
|
Рисунок 1 – Механическая характеристика асинхронного двигателя
Чтобы эффективно регулировать частоту вращения ротора, нужно изменять частоту вращения поля статора. Чтобы при этом сохранить момент, одновременно с частотой необходимо изменять и амплитуду приложенного к статорным обмоткам напряжения. Здесь частота – независимая переменная, а напряжение при данной частоте устанавливают исходя из того, как должна изменяться механическая характеристика двигателя в зависимости от частоты. Такой способ регулирования скорости электропривода а асинхронным двигателем называется частотным, а зависимость напряжения от частоты – законом частотного регулирования. В частности, чтобы обеспечить независимости момента от частоты, необходимо выдержать условие  . Но справедливо одно лишь при пренебрежении активным сопротивлением обмотки статора и приемлемо только для двигателей большой мощности. У двигателей малой и средней мощности пренебрежение активным сопротивлением статорной обмотки приводит к тому, что при изменении частоты постоянство момента не выдерживается.
. Но справедливо одно лишь при пренебрежении активным сопротивлением обмотки статора и приемлемо только для двигателей большой мощности. У двигателей малой и средней мощности пренебрежение активным сопротивлением статорной обмотки приводит к тому, что при изменении частоты постоянство момента не выдерживается.
Для поддержания момента близким к номинальному во всем интервале изменения частоты вращения применяют IR-компенсацию – завышают напряжение относительно закона , как показано на рисунке 2 –линией b. Компенсация носит такое название, потому что добавка напряжения пропорциональна активному сопротивлению статорной обмотки R и протекающему по ней току I.
Корректируя зависимости напряжения от частоты, можно обеспечить желаемую зависимость развиваемого двигателя момента от частоты питающего напряжения. Повышение жесткости механической характеристики в области малых значений частоты может быть достигнуто увеличением напряжения относительно линейного закона (линия а на рисунке 2). При частоте выше номинальной дальнейшее напряжение прекращают. В этой области его регулирование целесообразно в тех случаях, когда момент нагрузки уменьшается с ростом частоты вращения.
Рисунок 2 – Зависимости напряжения от частоты