Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
ЛЕКЦИЯ №2
|
|
по дисциплине «РАДИОАВТОМАТИКА»
Тема: Уравнения систем автоматического управления
Вопросы занятия:
1.Уравнения динамики и статики.
2. Линеаризация уравнений систем радиоавтоматики.
3. Пример линеаризации дифференциального уравнения САУ
Вопрос 1. Уравнения динамики и статики
Для исследования САУ или ее элементов необходимо получить математическое описание протекающих в них процессов.
Характер этих процессов определяется теми илиинымифизическими законами, математическая формулировка которых для данной системы (или элемента) и определяет уравнение, которому подчиняются рассматриваемые процессы.
Уравнения САУ и ее элементов могут быть:
1. Алгебраические ( ,
,  ,
,  -коэффициенты А.у., n – степень А.у.), квадратное кубическое.
-коэффициенты А.у., n – степень А.у.), квадратное кубическое.
2. Дифференциальные:
– обычные 
– в частных производных  функция
функция  удовлетворяющая этому соотношению т. е
удовлетворяющая этому соотношению т. е 
3. Интегродифференциональные уравнения;
4. Конечно – разностные;
В дальнейшем будем преимущественно рассматривать системы, описываемые дифференциальными уравнениями. Обычно уравнение системы получают, составляя уравнения отдельныхееэлементов.
Рассмотрим схему системы, изображенную на рис.1.
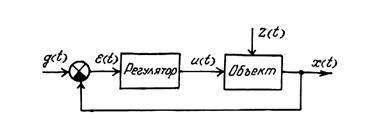
Рисунок 1
Предположим, что регулируемая величина х (t) может быть представлена ввиде
 (1)
(1)
а регулятор описывается двумя уравнениями

Уравнение (3) называют уравнением ошибки.
Система, представленная на рис.1, полностью описывается совокупностью уравнений (1), (2), (3).
Исключая в этих уравнениях " внутренние" переменные u (t) и  , можно получить уравнение, связывающее регулируемую величину x (t) с внешними воздействиями g (t) и z (t):
, можно получить уравнение, связывающее регулируемую величину x (t) с внешними воздействиями g (t) и z (t):
 (4)
(4)
Уравнение(4) определяет закон изменения во времени регулируемой величины под влиянием управляющих и возмущающих воздействий и называется уравнением динамики.
Допустим, что к системе в некоторый момент времени t 0 приложены неизменные во времени (постоянные) воздействия g (t)= g 0 и z (t)= z 0. Если с течением времени выходной процесс системы стремится к некоторому установившемуся значению
 (5)
(5)
тоиз (4) можно получить так называемое уравнение статики:
 . (6)
. (6)
Статический режим можно описать графически, построивстатическую характеристику либоих семейство, если элементили система имеют несколько входов.
Семейство статических характеристик, соответствующее (6), может иметь вид, представленныйна рис.2.
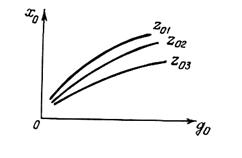
Рисунок 2
Статическую характеристику можно построить экспериментально, подавая на вход элемента или системы постоянную величину, после затухания переходных процессов.
Дифференциальное уравнение (4) может быть как линейным, так и нелинейным.
Вопрос 2. Линеаризация уравнений систем радиоавтоматики
Решение нелинейных дифференциальных уравнений высокого порядка представляет значительные трудности, поэтому стараются заменить в первом приближении нелинейное уравнение линейным.
Операция замены нелинейного дифференциального уравнения линейным называется линеаризацией.
Если функция F 3 в (4) является аналитической, то линеаризацию можно произвести с помощью разложения в ряд Тейлора в окрестности точки, соответствующей некоторому заданному режиму системы. В частности, в системах стабилизации заданный режим соответствует постоянным значениям входных и выходных величин. В общем случае они должны изменятьсяпо определенному закону, однако из-за наличия возмущений фактический режим отличается от заданного. В нормально функционирующей системе фактический режим отличается от заданного незначительно, отклонения переменных от требуемых значений малы. Это обстоятельство и позволяет произвести линеаризацию на основе разложения нелинейных функций в ряд Тейлора.
Линеаризация может быть проведена по отдельным звеньям. Произведем в общем виде линеаризацию уравнения (4), считая заданный режим в системе режимом стабилизации.
Отклонения воздействий  и
и  от постоянных значений g 0 и z 0 вызовут в соответствии с (4) отклонение
от постоянных значений g 0 и z 0 вызовут в соответствии с (4) отклонение  выходной координаты x:
выходной координаты x:
 (7)
(7)
Раскладывая правую часть (7) в ряд Тейлора в окрестности точек x 0, g 0, z 0 и удерживая в разложении только отклонения первой степени, получим
(8)
Вычитая из (8) почленно уравнение статики (6), находим:
 (9)
(9)
где 
Уравнение (9) является линейным дифференциальным уравнением с постоянными коэффициентами и называется уравнением первого приближения.
Уравнения первого приближения играют чрезвычайно большую роль в исследовании систем автоматического управления весьма широкого класса.
Эти уравнения положены A.M. Ляпуновым в основу создания теории устойчивости движения систем.
Геометрическая трактовка изложенного выше способа линеаризации заключается в следующем. Изобразим статическую характеристику системы x 0= F (g 0) при некотором значении z = z 0 (рис.3).

Рисунок 3
Отметим на ней точку, соответствующую рабочемурежиму, и проведем в этой точке касательную. Тогда
где  - угол наклона касательной к статической характеристике в точке
- угол наклона касательной к статической характеристике в точке 
 .
.
Отсюда наглядно видно, что малое приращение выходной переменной вызывает линейное изменение выходной координаты

а для приращенийимеем уравнение
 .
.
Аналогичные геометрические представления справедливы и относительно других переменных правой части уравнения(4).
Таким образом, проведенная аналитически линеаризация соответствует замене нелинейной кривой, связывающей входные и выходные величины, а также их производные прямой линией, и переносу начала координат в точку, соответствующую рабочему режиму.
Аналогичным образом могут быть получены уравнения первого приближения для случая, когда заданный режим в системе не является режимом стабилизации.
Вопрос 3. Пример линеаризации дифференциального уравнения САУ.
Рассмотрим в качестве примера процесс составления и линеаризации дифференциального уравнения системы ФАПЧ, функциональная схема которой приведена на рис.3.1.
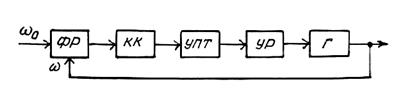
Рисунок 3.1
Запишем уравнения отдельных элементов системы.
Фазовый различитель (фазовый детектор). На него поступают колебанияэталонного и стабилизируемого генераторов 
 , (3.1)
, (3.1)
 . (3.2)
. (3.2)
Будем полагать, что среднее значение выходного напряжения фазового различителя меняется по косинусоидальному закону в зависимости от сдвига фаз между колебаниями:
 . (3.3)
. (3.3)
Данный элемент является нелинейным.
Линеаризацию произведем в окрестности точки устойчивого равновесия в системе.
Угол  , соответствующий данной точке, обозначим через
, соответствующий данной точке, обозначим через  .
.
Разложим косинусоидальную функцию в ряд около точки и ограничимся двумя членами:
 ,
,
где обозначено -  .
.
Тогда уравнение (3.3) можно заменить линейным
 . (3.4)
. (3.4)
Корректирующий контур обычно выполняется на RС - элементах и может иметь вид (рис.3.1).
Найдем уравнение, связывающее выходное напряжение корректирующего контура с входным.
Для этого воспользуемся вторым законом Кирхгофа и запишем равенство, считая контур работающим на холостом ходу:
 (3.5)
(3.5)
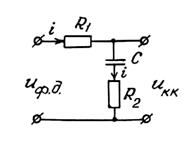
Рисунок 3.2
Из (3.5) имеем
 (3.6)
(3.6)
Поскольку
то
 (3.7)
(3.7)
Подставляя (3.6) в (3.7), находим

После несложных преобразований получаем
 (3.8)
(3.8)
Как видноиз (3.8), корректирующий контур, схема которого изображена на рис. 3.2, описывается линейным дифференциальным уравнением первого порядка.
|