Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Термоелектричний перетворювач ТХК-1590В хромель-копелевий
|
|

Термоелектричний перетворювач ТХК-1590В хромель-копель (ТХК1590В, ТХК 1590В, ТХК-1590-В, txk-1590b, txk1590b, txk1590 b, txk-1590-b). Призначений для вимірювання температури теплоносія, бетонного ЗАХИСТУ та металоконструкцій реакторів, повітря, газоподібних середовищ і корпусу турбіни.
Технічні характеристики термоелектричного перетворювача ТХК-1590В хромель-копель:
| Робочий діапазон вимірюваних температур, º С | 50-400 |
| Умовно позначення | НСХ – L |
| Показники теплової інерції виробу, с | не Більше 3 |
| Клас | |
| Кількість робочих спайок | 1, 2 |
| Умовний тиск вимірюваного середовища, МПа | 0.63, 18 |
| Ресурс, років | |
| Клас безпеки | 2Н |
| Стійкість до горіння | вогнестійкий, не поширює горіння |
| Габарити, мм | Довжина - від 120 до 16000. |
OLC-200 - датчик газоаналітичний стаціонарний
Даний прилад OLC-200 - це одноканальний або двоканальний стаціонарний точковий датчик. На вхід пристрою подаються сигнали від електрохімічних сенсорів токсичних газів або кисню, сенсорів горючих газів з шаром каталізатора, інфрачервоних і фотоіонізаціонний сенсорів. Сенсор, що поставляється виробником, оснащується 8-провідним інтерфейсом Smart Sensor, який дає можливість завантажувати в OLCT 200 дані конфігурації. Завдяки передовим мікроконтроллерам і інтерфейсу оператора з першокласним рідкокристалічним дисплеєм, даний пристрій забезпечує розширені функції діагностики та аналізу несправностей. 
Технічні характеристики стаціонарного газоаналітичного датчика OLC-200, OLCT-200
| Характеристики | Значения |
| Корпус | алюміній з епоксидним покриттям, нержавіюча сталь |
| Дисплей | рідкокристалічний з підсвічуванням (не всі модифікації мають підсвічування) |
| Аварійні сигнали | встановлювані користувачем пороги спрацьовування, можливість оснащення звуковою та світловою сигналізацією |
| Вихідні сигнали | (4 - 20) мА, RS-485 ModBus по протоколу HART 900 МГц/ 2, 4 ГГц |
| Источник питания: | |
| Принцип ідентифікації газа | термокаталітичний, електрохімічний, інфрачервоний, фотоіонізаціонний |
| Реєстрація данних | безперервна, із збереженням в пам'яті пікових значень |
| Зв'язок з ПК | є |
| Температурний діапазон, °C: | |
| - стандартна версія | от -40 до +55 |
| - арктична версія | от -55 до +60 |
| Діапазон вологості без конденсату, % | 10 - 95 |
| Захист | IP 66 |
| розміри, мм, не більше | 127× 197× 130 |
| Масса, кг, не більше | 3, 2 |
Ротаметри РЭВ
Ротаметри типу РЭВ призначені для виміру об'ємної витрати однорідних потоків, що плавно змінюються, чистих і слабозабруднених рідин з дисперсними включеннями сторонніх часток.

Рис. Ротаметри типу РЭВ
Призначення приладу: вимір об'ємної витрати рідин нейтральних до сталі 12Х18Н9Т ДСТ 5632-72 і перетворення його в електричний сигнал.
Верхня межа виміру (м3/год): 0, 1, 0, 16, 0, 25, 0, 4.
Нижня межа виміру: не більше 20% від верхньої межі виміру.
Діаметр умовного проходу (мм): 10(0, 1), 15.
Погрішність виміру (%): ±2, 5; ±4; Робочий тиск (кгс/див2): 6, 16, 64.
Ротаметри електричні РЭВ виконані у вибухозахищеному виконанні. Ротаметри електричні вибухозахищеного виконання РЭВ призначені для роботи у вибухонебезпечних приміщеннях і мають вибухозахист датчиків (по градації ПИВЭ) ВЗГ. Вихідний сигнал 4-20 мА. Конец формы
Вимірювальний перетворювач тиску типу «Сафір 22ДД».
Перетворювач Сафір 22ДД призначений для безперервного перетворення значення вимірюваного параметра (рівня) в уніфікований струмовий сигнал 4-20 мА.
Перетворювач Сафір 22ДД використовується для роботи в системах автоматичного контролю, регулювання і управління технологічними процесами і для забезпечення неперервного перетворення значення вимірюваного параметру - рівня в ДП в уніфікований токовий сигнал дистанційної передачі.
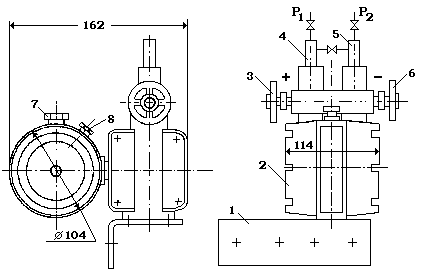
Рис. Зовнішній вигляд ПВ різниці тиску типу " Сафір ДД”:
1 – кронштейн; 2 – тензоперетворювач; 3, 6 – запірні вентилі; 4, 5 –запобіжні ніпелі; 7 – штуцер для підведення проводів; 8 – клема “Земля”.
Перетворювач складається із вимірювального блоку і електронного пристрою.
Вимірювальний параметр подається в камеру вимірювального блоку і лінійно перетворюється в деформацію чутливого елемента і зміну електричного опору тензоопорів тензоперетворювача, розташованого в вимірюючому блоці.
Електронний пристрій перетворювача перетворює цю зміну опору в токовий вихідний сигнал.
Чутливим елементом тензоперетворювача є пластина із монокристалічного сапфіра з кремнієвими плівчастими тензорезисторами (структура КНС), міцно з’єднана з металевою мембраною тензоперетворювача.
Блок живлення “Сафір” БП2-36.
Блоки живлення “Сафір” БП2 призначені для живлення стабілізованою напругою постійного струму 24V або 36V датчиків тиску, температури й інших приладів.
Технічні характеристики:
· номінальна вихідна напруга-24; 36В постійного струму;
· напруга живлення-змінна від 100 до 250В частотою 50 Гц;
· максимальний струм навантаження-45 мА;
· струм спрацювання захисту-від 60 до 65 мА;
· споживана потужність-5ВА, не більше;
· клас стабілізації вихідної напруги-0.1.
Принцип дії блоку заснований на подвійному перетворенні живильної напруги в необхідну вихідну стабілізовану напругу.
Блок має один вихідний канал, гальванічно розв'язаний з напругою живлення.
У блоці передбачена світлова сигналізація зеленого кольору про включений стан і червоного кольору про спрацьовування захисту від перевантаження й короткого замикання.
У нормальному режимі роботи блоку горить один із трьох зелених світлодіодів в залежності від струму навантаження.
У випадку підключення до блоку датчика з вихідним сигналом 4-20 мА дана сигналізація показує:
- “ 0 -3, 5 мА” - датчик відключений або обрив лінії зв'язку;
- “ 3, 5 - 25 мА” - датчик працює нормально;
- “ > 25 ма” - датчик несправний або підключене додаткове навантаження;
При спрацьовуванні захисту гасне зелений і загоряється червоний светлодіод.
Апаратура комплексу «Каскад-2».
Підсилювач тиристорний трипозиційний У23.
Підсилювач тиристорний трипозиційний У23 здійснює посилення потужності й перетворення вхідних сигналів постійного струму (24В) у керуючу асинхронним двигуном трифазну напругу 380В з прямою або реверсивною послідовністю фаз, а також формує постійний струм на виході для гальмування двигуна.
Підсилювач тиристорний трипозиційний У23 здійснює:
– заборону на пуск електродвигуна виконавчого механізму;
– сигналізацію про перевантаження електродвигуна виконавчого механізму;
– періодичне відключення електродвигуна виконавчого механізму при перевантаженні;
- захист електродвигуна виконавчого механізму від миттєвого реверса.
Блок регулюючий аналоговий з імпульсним вихідним сигналом (Р27).
Блок Р27 виконує наступні функції:
- підсумовування уніфікованих вхідних сигналів постійного струму;
- введення інформації про задане значення регульованої величини, формування й посилення сигналу відхилення регульованої величини від заданого значення;
- формування вихідного імпульсного електричного сигналу для впливу на керований процес відповідно до одного з наступних законів регулювання:
1) пропорційним (П) разом з датчиком виконавчого механізму;
2) пропорційно-інтегральним (ПІ) разом з виконавчим механізмом;
3) інтегрально-диференціальним (ПІД) разом з виконавчим механізмом;
Блок динамічних перетворень Д05.
Блок динамічних перетворень виконує наступні функції:
- перетворення аналогових вхідних сигналів по диференціальному (Д), пропорційному (П) або аперіодичному (А) закону;
- перетворення вхідних сигналів по інтегральному (І) законі;
- демпфірування аналогових вхідних сигналів при виконанні функції диференціального перетворення;
- гальванічний поділ аналогових вхідних сигналів постійного струму по кожному із двох вхідних сигналів;
- підсумовування й масштабування аналогових вхідних сигналів постійного струму.
Блок прийому й розмноження струмових сигналів (ПСРТ).
Блок прийому й розмноження струмових сигналів ПСРТ-125 призначений для прийому й перетворення по двох каналах сигналів напруги або струму і видачі прийнятої інформації в будь-якому порядку в шість каналів перетворення струму або напруги, і обміну інформацією.
3. Розрахунок системи автоматизованого регулювання деаерації
3.1 Розрахунок параметрів контуру регулювання рівня в деаераторі підживлення
До складу САР, що розраховується входять наступні елементи:
1) об’єкт регулювання – резервуар;
2) регулюючий клапан (ТКС14);
3) виконавчий механізм (ТК14S02);
4) давач рівня;
5) регулятор рівня.
Для розрахунку параметрів передаточних функцій елементів САР використаємо наступні вихідні дані:
- діаметр резервуару – 2980 мм;
- висота резервуару – 3500 мм;
- відстань між врізками давача рівня в деаераторі – 2620 мм;
- діаметр вхідного трубопроводу – 100 мм;
- діаметр вихідного трубопроводу – 150 мм;
- оптимальне значення рівня – 2000 мм;
- початкове значення рівня – 1650 мм;
- коефіцієнт витрати клапана – 1;
- густина води – 955 кг/м3;
- хід штоку клапана 100 мм;
- максимальне значення напруги потенціометричного перетворювача – 10В;
- максимальне значення напруги давача рівня – 10В;
- постійна часу виконавчого механізму – 2, 5 с.
| ~ |
| LC |
| LT |
| Від насосів дистиляту |
Рис. Функціональна схема автоматизації рівня в деаераторі
Розглянемо питання вибору закону регулювання. Як об'єкт регулювання рівня, деаератор є герметичним баком з насосом на зливі, тобто не володіє самовирівнюванням. Його передаточна функція W(S) = K/S. Застосування ПІ-закону регулювання для такого об'єкту приводить до тривалого коливального процесу регулювання, що небажано. Крім того, для деаератора допускається нерівномірність регулювання.
Тому застосуємо П-закон регулювання, який реалізується обхватом ПІ-регулятора жорстким зворотним зв'язком по положенню регулюючого органу. Рівень в деаераторі вимірюється перетворювачем САФІР 22, сигнал від якого поступає на регулятор, де порівнюється з сигналом завдання.
Таким чином, на вхід регулятора поступають два сигнали: по рівню в деаераторі і по положенню клапана. Настройкою регулятора є " коефіцієнт пропорційності" для вказаних двох входів.
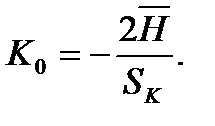
При регулюванні рівня води в деаераторі П-регулятором передаточна функція замкнутої системи регулювання за збурюючим (витрата води) каналом описується передаточною функцією, як було сказано вище (W(S) = K/S), об’єкта регулювання за каналом, зміна положення клапана на вході – зміна рівня на виході має вигляд:
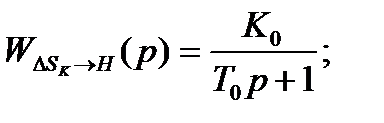
де: 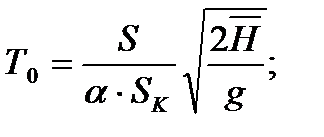
Обрахуємо площу дзеркала рідини в деаераторі. Оскільки деаератор має циліндричну форму і внутрішній радіус рівний DД= 2.98 м то після підстановки значень отримаємо:

Площа перерізу вхідного трубопроводу:

Стала об’єкта:
Коефіцієнт передачі клапана визначається як відношення зміни площі поперечного перетину до зміни ходу штока клапана:
Коефіцієнт передачі виконавчого механізму визначається як відношення зміни ходу вихідного штока до зміни керуючої напруги:
Коефіцієнт передачі датчика рівня визначається як відношення зміни вихідної напруги до зміни рівня в резервуарі:

Коефіцієнт передачі потенціометричного перетворювача положення клапана визначається як відношення зміни вихідної напруги до зміни положення штоку:

3.2 Вибір закону регулювання
Для систем регулювання, застосовуються регулятори, що реалізовують наступні закони регулювання:
· пропорційний (П);
· інтегральний (І);
· диференціальний (Д)
· пропорційно - інтегральний (ПІ);
· пропорційно-інтегрально-диференціальний (ПІД);
· позиційний.
П - регулятори можуть застосовуватися як для об'єктів з самовирівнюванням, так і без самовирівнювання в тих випадках коли необхідна висока точність регулювання при великих, але плавних змінах навантаження. Ці регулятори, відрізняючись простотою конструкції, дозволяють стійко і без залишкової нерівномірності регулювати роботу великого числа промислових об'єктів. З цієї причини вони набули найбільшого поширення на практиці.
Керуючись цим вибираємо для регулятора рівня в деаераторі П - закон регулювання.
Пропорційний закон регулювання.
При пропорційному законі регулювання (П - закон) регулюючий орган xр переміщується пропорційно відхиленню регульованої величини у від заданого значення уз, тобто пропорційно розузгодженню yр:

де kр - коефіцієнт посилення регулятора.
При пропорційному законі регулювання регулюючий орган переміщується пропорційно відхиленню регульованої величини від заданого значення, тобто пропорційно розузгодженню на вході регулятора. Це значить, що кожному значенню регульованого параметра в межах зони регулювання регулятора відповідає певне положення регулюючого органу. Тобто рівновага системи статичного регулювання може бути при різних значеннях регульованої величини.
| Объект |
| П - регулятор |
| y |
| yз |
| xр |
| x |
| kр1 < kр2 < kр3 |
| y(t) |
| t |
| kр1=0 |
| kр1 |
| kр2 |
| kр3 |
| Задане значеня yз |
| ∆ 0 |
| ∆ 1 |
| ∆ 2 |
| ∆ 3 |
| Регульований параметр |
Рис. Пропорційний регулятор
Особливістю П - регулятора є наявність помилки регулювання (статична помилка ∆ 0, ∆ 1, ∆ 2, ∆ 3), фізична природа якої пояснюється тим, що переміщення регулюючого органу можливо тільки за рахунок відхилення регульованої величини, яке і утворює цю помилку. При значному коефіцієнті посилення статична помилка може бути зменшена, але при цьому виникає небезпека виникнення коливального процесу в перехідних режимах.
Гідністю П - регулятора є швидкодія, відносна простота і зручність настроювання.
3.3 Моделювання перехідного процесу та оптимізація параметрів регулятора САР
Отримаємо перехідний процес в замкненій САР з використанням пакету Matlab та визначимо показники якості перехідного процесу. Структурна схема досліджуваної САР рівня в середовищі Simulink має вигляд на наступному рис.
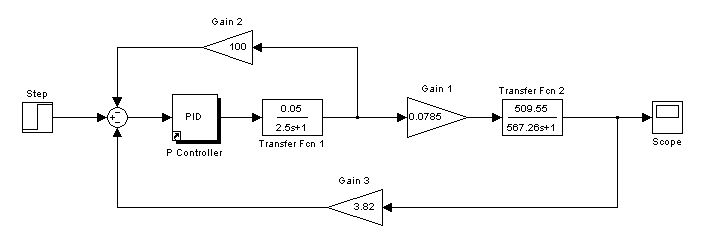
Рис. Simulink – модель САР рівня в деаераторі
Встановивши значення коефіцієнтів регулятора Кр=20 отримаємо перехідний наступний процес:
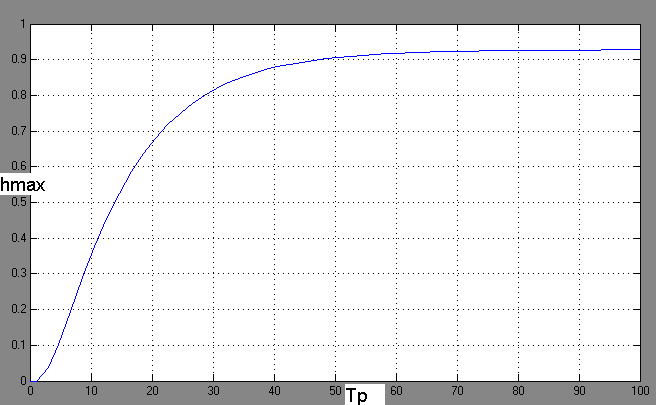
Рис. Перехідна характеристика АСР до оптимізації
З графіка знаходимо:
час регулювання Tр=94 с;
перерегулювання  ;
;
кількість коливань n=0
Для зменшення часу регулювання скористаємось процедурою оптимізації NCD-Blocksetпакету Matlab Simulink.
Інструментальний пакет Nonlinear Control Design Blockset (NCD-Blockset) надає в розпорядження користувача графічний інтерфейс для настройки параметрів динамічних об’єктів, які забезпечують оптимальність перехідних процесів.
За допомогою даного інструмента можна настроювати параметри нелінійної Simulink – моделі, в якості яких може бути задана будь-яка кількість змінних, включаючи вектори і матриці.
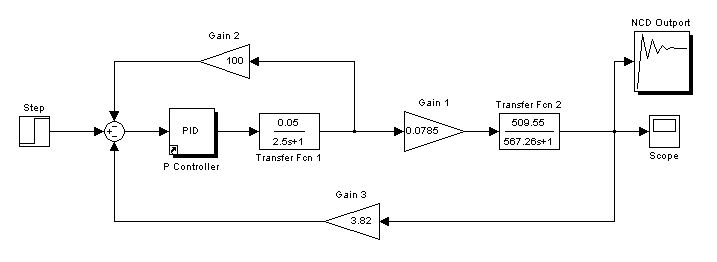
Рис. Simulink – модель САР температури в резервуарі з використанням NCD-блоку.
Задання динамічних обмежень здійснюється у візуальному режимі. На базі цих обмежень NCD-Blockset автоматично генерує задачу кінцевомірної оптимізації так, щоб точка екстремуму в просторі параметрів, які настроюються, відповідала виконанню всіх вимог, що ставляться до якості процесу. Ця задача вирішується із застосуванням спеціалізованої процедури квадратичного програмування із пакета Optimization Toolbox. Хід оптимізації контролюється на екрані з допомогою відображення графіка контрольованого процесу і поточних значень функції, що мінімізується. При завершенні процесу його результат фіксується в робочому просторі.
Задача оптимізації полягає в тому, щоб вибрати такий коефіцієнт передаточної функції П – регулятора, який би забезпечував вказані вимоги до якості перехідного процесу.Параметри блоку Kp задамо змінною величиною, а саме: Kp.У командному вікні MatLab задамо початкові значення змінних: Kp=1.
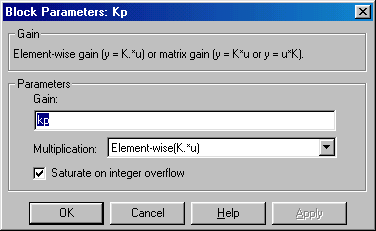
Рис. 4 Вікна встановлення параметрів П регулятора
Таким чином ми сформували Simulink-модель об’єкта управління і тепер можемо приступити до задання обмежень, які накладаються на вихід системи, тобто блок Transfer Fcn.
Відкриваємо вікно блока NCD Outport, двічі клацнувши по ньому:
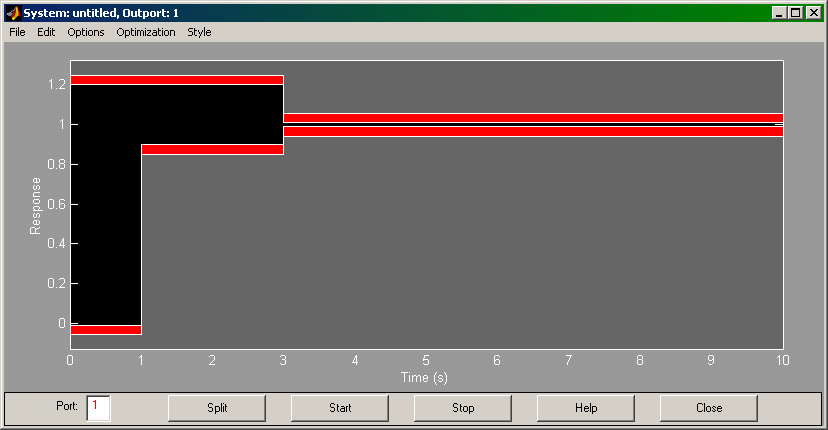
Рис. Вікно блоку NCD Outport
Встановимо коридор, в межах якого повинен знаходитись сигнал блока NCD Outport у відповідності з вимогами задачі.

Рис. Параметри коридору для обмеження системи
Наші вимоги:
- замкнута система має перерегулювання менше 30% (від 0, 9 до 1, 1);
- час перехідного процесу менше 30 секунд. Після 50 секунд встановлене значення коливається в межах 1% (від 0, 99 до 1, 01).
Далі вибираємо пункт меню Optimization\ Parameters. При цьому відкривається вікно, в якому необхідно вказати назви оптимізуючих параметрів: Kp в полі Tunable Variables. В цьому ж вікні змінимо значення поля Discretization interval на 0.1 і поставимо " галочку" напроти поля Stop optimization as soon as the constraints are achieved (для закінчення процесу оптимізації після того, як виконані всі обмеження).
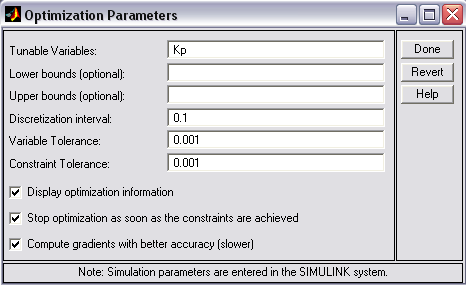
Рис. Вікно Optimization Parameters
Тепер все готове для процесу оптимізації. Натискаємо кнопку Start у вікні блока NCD Outport і спостерігаємо за розвитком процесу: для кожного етапу оптимізації у вікні відображаються графіки сигналу (рис. 4.11.), які відповідають початковим (білого кольору) і поточним (зеленого кольору) значенням параметрів, що настроюються, і відображається хід реакції.
Після закінчення процесу оптимізації, оптимальні значення параметрів, які відповідають зеленій кривій зберігаються в робочому просторі MatLab, в даному випадку, це: kp =57.
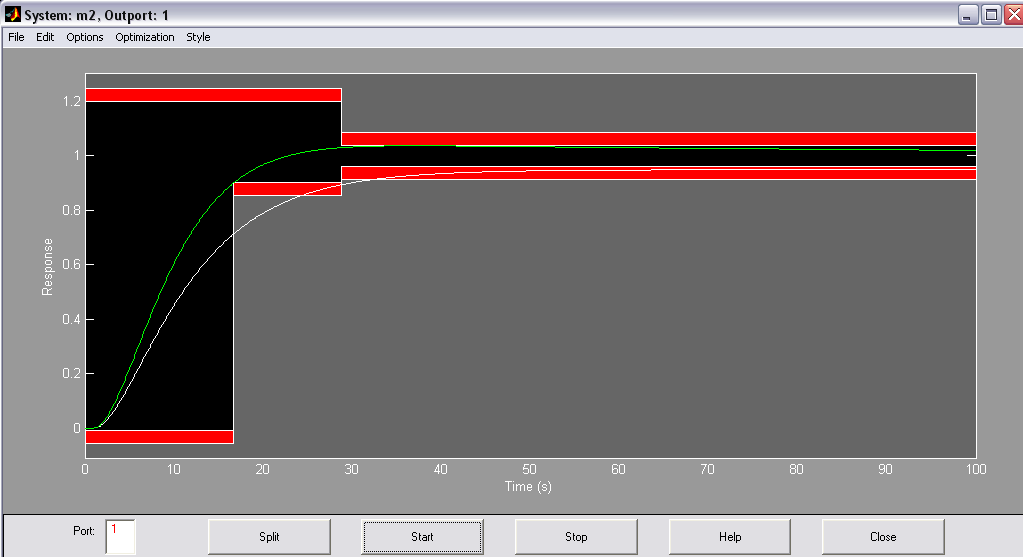
Рис. Етапи оптимізації
Встановивши оптимальні значення регулятора отримаємо перехідний процес з заданими показниками якості регулювання.
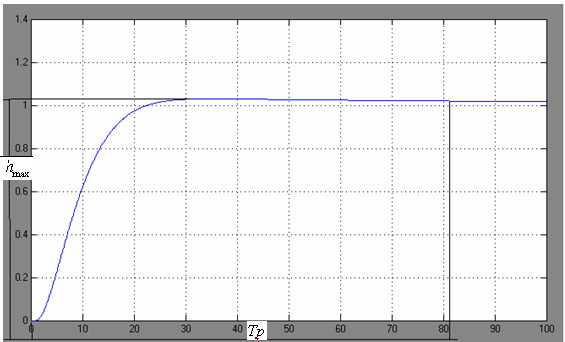
Рис. Перехідний процес системи з оптимальними параметрами налаштування П - регулятора
З графіка знаходимо: Tр hmax
час регулювання Tр=82 с;
перерегулювання  ;
;
кількість коливань n=0
Висновок: параметри якості перехідного процесу задовольняють вимогам до систем автоматичного регулювання.
4. Програмно-конфігураційна реалізація системи.
4.1. Загальні відомості про TRACE MODE
TRACE MODE призначена для розробки великих розподілених АСКТП широкого призначення. Ця система створена в 1992 році фірмою AdAstra Research Group Ltd.(Росія) і в наш час має дуже широке застосування. Системи які розроблені на базі ТРЕЙС МОУД працюють в енергетиці, металургії, нафтовій, газовій, хімічній і іншій галузях промисловості та у комунальному господарстві. По числу впроваджень ТРЕЙС МОУД значно випереджає закордонні пакети подібного класу.
ТРЕЙС МОУД - заснована на інноваційних, що не мають аналогів, технологіях. Серед них: розробка розподіленої АСУТП як єдиного проекту, автопобудова, оригінальні алгоритми обробки сигналів і керування, об'ємна векторна графіка мнемосхем, єдиний мережевий час. ТРЕЙС МОУД - це перша інтегрована SCADA- і softlogic-система, що підтримує наскрізне програмування операторських станцій і контролерів за допомогою єдиного інструменту.
Основними характеристиками ТРЕЙС МОУД являються наступні:
- Модульна структура - від 128 до 64000х16 I/O;
- Кількість тегів необмежена;
- Мінімальний цикл системи рівний 0.001 с;
- Відкритий формат драйвера для зв'язку з будь-яким УСО;
- Відкритість для програмування (Visual Basic, Visual C++ і т.д.);
- Вбудовані бібліотеки з більш ніж 150 алгоритмами обробки даних і керування в т.ч. фільтрація, PID, PDD, нечітке, адаптивне, позиційне регулювання, ШІМ, керування пристроями ( клапан, засувка, привод і т.д.), статистичні функції і довільні алгоритми;
- Засоби програмування контролерів і АРМ на основі міжнародного стандарту IEC 1131-3;
- Більш ніж 200 типів форм графічного відображення інформації в т.ч. тренди, мультиплікація на основі растрових і векторних зображень, Active;
- Мережа на основі Netbios, NetBEUI, IPX/SPX, TCP/IP;
- Автопобудова проекту і ін.