Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Примеры решения задач первичной обработки данных.
|
|
Задача 1. Датчик давления имеет линейную шкалу в диапазоне 0-10 кГс/см2. Сигнал от датчика поступает на 12 разрядный АЦП. Необходимо создать закон трансляции.
Решение.Поскольку датчик имеет линейную шкалу, то выбираем закон трансляции линейный: 
Т.к. нулевому значению сигнала соответствует нулевое значение измеряемого параметра (давления), то М=0


Задача 2. Датчик давления измеряет избыточное давление в технологическом аппарате в диапазоне 0-1кГс/см2, имеет линейную шкалу и статическую погрешность 0, 05 кГс/см2. Сигнал с датчика имеет стандартный выход на 12-ти разрядный АЦП. Конечный результат должен быть представлен в кПа..
Решение. Поскольку нулевому значению кода АЦП соответствует нулевое значение измеряемого параметра и присутствует статическая ошибка, то закон трансляции имеет вид:
Задача 3. Датчик атмосферного давления имеет линейную шкалу в диапазоне 400-900 мм.рт.ст. и стандартный выход на 12-ти разрядный АЦП. Конечный результат должен быть представлен в кПа.
Решение. Минимальному значению кода АЦП (0) соответствует значение давления 400 мм.рт.ст.=53.3 кПа, а максимальному (4095) – 900 мм.рт.ст = 120 кПа. Формула для расчета реального значения атмосферного давления записывается следующим образом:
Задача вторичной обработки данных. Под вторичной обработкой данных понимают формирование регулирующих и управляющих воздействий на объект управления (ТП) в соответствии с его алгоритмом функционирования. Задачу вторичной обработки данных можно сформулировать следующим образом: известны восстановленные в результате решения задачи первичной обработки номинальные или действительные значения измеренных физических величин Х. Необходимо найти управляющие воздействия U, обеспечивающие состояние объекта управления в соответствии с его алгоритмом функционирования. Поиск управляющих воздействий осуществляется в соответствии алгоритмом управления. Таким образом, алгоритмом решения задачи вторичной обработки данных является алгоритм управления (Рисунок 2.4), где  погрешность метода решения задачи.
погрешность метода решения задачи.
Рисунок 2.4 - Алгоритм управления
На функциональной схеме решение задач первичной и вторичной обработки отражается так, как показано на рисунке 2.5.
Рисунок 2.5 - Отражение результатов решения задач первичной и вторичной обработки данных.
Данные с выхода датчика температуры ТЕ после первичной обработки выдаются на индикацию и сигнализацию. Сигнализация имеет место, если измеренная температура выходит за пределы допустимых значений. Сигнал с датчика уровня LE после первичной обработки поступает на вход регулятора, который вырабатывает управляющее воздействие U1, поступающее на вход исполнительного устройства (например, управляемого канала). Кроме того, сигнал с датчика LE поступает на вход схемы управления, которая работает по закону логического управления. Эта схема вырабатывает управляющее воздействие U2, поступающее на вход другого исполнительного устройства, которое включает или выключает некоторый технологический агрегат. Сигналы U1 и U2 являются результатами решения задач вторичной обработки данных. Сигнал с датчика LE индицируется. Если значение уровня выходит за допустимые пределы, то осуществляется сигнализация этого параметра и отражение его в журнале тревог (архивирование).
Обзор состава комплекса технических средств АСУТП. Комплекс технических средств (КТС) АСУТП представляет собой управляемую вычислительную систему, структура которой представлена на рисунке 2.6.
Рисунок 2.6. - Общая структура КТС АСУТП
КТС АСУТП отличается от КТС других АСУ блоком УСО (устройство сопряжения с объектом), который обеспечивает связь ЭВМ с датчиками и исполнительными устройствами, установленными на объекте управления ОБ. Другие компоненты, указанные на схеме Процессор (Проц.), Память (ЗУ), канал и устройства ввода/вывода (ВВ/ВЫВ), составляют ядро КТС, функционально идентичное ядру КТС любой другой АСУ. В качестве ЭВМ в современных АСУТП используются персональные ЭВМ или специальные микропроцессорные устройства.
ЭВМ обеспечивает выполнение следующих функций:
1. обработку информации,
2. контроль и управление состоянием ЭВМ,
3. ввод-вывод информации (клавиатура, дисплей, принтер).
Эти функции являются предметом изучения специальных дисциплин, поэтому их описание здесь опускается. Рассмотрим более подробно состав и функции УСО, которые во многом обеспечивают решение задач первичной и вторичной обработки информации.
Устройство сопряжения с объектом (УСО). УСО представляют собой наборы агрегатных модулей сбора, коммутации и преобразования сигналов контроля и выдачи сигналов управления на объектах, оснащенных датчиками, системами местной (локальной) автоматизации и исполнительными механизмами. Агрегатность позволяет легко наращивать количество каналов и типов функций, благодаря чему УСО можно оптимально согласовывать с требованиями конкретных систем. По типу сигналов, вызываемых датчиками, УСО делят на подсистемы, состоящие из модулей ввода-вывода аналоговых сигналов и на подсистемы, состоящие из модулей ввода вывода дискретных сигналов.
Модули аналогового ввода-вывода могут выполнять следующие функции:
1. Подключения. Сигналы с датчиков передаются на аналоговые входы по одиночным или парам проводов. Сигнальные провода должны оканчиваться в точке сопряжения с аналоговой подсистемой. Устройствами подключения, предназначенными для этой цели, могут служить клеммные колодки, кабельные разъемы и т.д.;
2. Нормализация сигнала, т.е. модификация сигнала (фильтрация, ослабление, смещение уровня, линейная или нелинейная компенсация, преобразование тока в напряжение (усиление исключается)).
3. Усиление сигнала. Осуществляется с помощью усилителей трех типов: а) усилители сигналов низкого уровня, коэффициент усиления которых может быть 100  1000; б) буферный усилитель, имеющий высокое входное и низкое выходное сопротивление, коэффициент усиления 1 или 2; в) усилитель слежения-запоминания, его выход пропорционален входу до тех пор, пока не последует команда запоминания, после чего выходной сигнал остается неизменным до конца действия команды.
1000; б) буферный усилитель, имеющий высокое входное и низкое выходное сопротивление, коэффициент усиления 1 или 2; в) усилитель слежения-запоминания, его выход пропорционален входу до тех пор, пока не последует команда запоминания, после чего выходной сигнал остается неизменным до конца действия команды.
4. Коммутации, коммутатор состоит из электронного или электромеханического переключателя, последовательно подключающего каждый отдельный вход или выход к ТП. Коммутация осуществляется до или после усиления. Коммутаторы различают по уровням сигналов, быстродействию и числу направлений коммутации.
5. Аналого-цифровое (или цифро-аналоговое) преобразование, которое осуществляется с помощью преобразователей АЦП. Основные характеристики АЦП: время преобразования и длина разрядной сетки, на рисунке 2.7 приведена схема УСО при вводе аналоговых сигналов.
Рисунок 2.7 блок-схема УСО для аналоговых сигналов
Модули дискретного ввода вывода также как и аналоговые выполняют функции подключения, нормализации, усиления и коммутации. Кроме того, они способны подсчитывать число импульсов, поступающих с датчиков за определенный промежуток времени, или " расширять" импульсы до заданной величины.
На вход модулей ввода-вывода дискретных сигналов могут поступать:
1. инициативные, т.е. уровневые сигналы, которые вырабатывает датчик, если его состояние изменяется из 0 в 1 (или из 1 в 0).
2. Дискретные сигналы, т.е. импульсные сигналы различной частоты следования и различной длительности.
3. Сигналы с датчиков типа " сухой контакт".
На рисунке 2.8 приведена блок-схема цифрового ввода.
Рисунок 2.8 - Блок-схема УСО для дискретных сигналов
Информационный процесс - преобразование информации. В результате чего информация может измениться как по форме, так и по содержанию. Обобщённая схема технологического процесса обработки информации (рисунок 2.9):
Рисунок 2.9- Обобщённая схема технологического процесса обработки информации
1 этап. Сбор и регистрация информации – это процесс перевода информации во входные данные, представленные в двоичных кодах. В разных системах сбор и регистрация различны, но можно выделить общие черты (рисунок 2.10):
Рисунок 2.10 - Сбор и регистрация информации
Сбор информации – это преобразование потока осведомляющей информации, поступающей от объекта управления путём восприятия и превращения в документ. Подготовка информации – это процесс выбора информации, так как модель предметной области накладывает ограничения на состав и формат вводимых данных.
Контроль – это этап, направленный на предупреждение, выявление и устранение ошибок в информации.
2 этап. Передача информации – это обмен данными между процессами в системе контроля и управления (или в системе информационных технологий - ИТ).
Передача может осуществляться:
· по каналам связи;
· с помощью сетевых процедур.
Операции сетевых процедур включают:
1. Коммутация
2. Адресация и маршрутизация потоков данных
3. Передача данных по каналам связи.
Передача данных по каналам связи включает:
1. Кодирование – декодирование
2. Модуляцию – демодуляцию
3. Согласование и усиление сигналов
Технология обмена данными строится на базе двух компонент:
1. Физическая: устройства ввода/вывода, модемы, усилители.
2. Программная: программное обеспечение (ПО) сетевого обмена, ПО кодирования – декодирования.
3этап. Обработка информации – преобразование информации. Модель обработки данных включает:
1. Модель организации вычислительного процесса. Это программы управления ресурсами. Представлены они программами системного управления компьютером. Комплексы таких алгоритмов и программ получили название ОС.
2.Модель автоматизированной обработки данных. Это совокупность программ для решения формализованного преобразования исходных данных в результат.
3. Модель процедуры отображения данных. Это ПО преобразования данных, представленных в виде машинных кодов в воспринимаемую человеком информацию, несущую смысловое содержание в виде текста, графики, звука и мультимедиа.
4 этап. Хранение информации – это создание, хранение и поддержка в актуальном состоянии информационного фонда, необходимого для решения функциональных задач системы управления. С хранением напрямую связан поиск данных – это выборка нужных данных. Хранение состоит из ряда основных процедур:
1.хранения (состоит в том, чтобы сформировать и поддерживать структуру хранения данных в памяти, в т.н. базе данных БД.);
2. выбор хранения;
3. актуализация (поддержка хранимых данных на уровне, соответствующем информационным потребностям решаемых задач в системе, где организовано ИТ.)
4. извлечение данных из базы (связано с процедурой выборки).
Для формирования физической реализации БД применяют 3-х уровневую систему моделей:
1) концептуальная схема информационной модели (описывает содержание предметной области, т.е. какая и в каком объёме должна храниться информация);
2) логическая схема информационной базы (описывает формализованную структуру информации);
3) физическая схема (методы размещения данных определяет и доступ к ним на машинных носителях).
5 этап. Приём – получение данных.
6 этап. Анализ данных – анализ информации вручную или с помощью ПО.
Как было отмечено в лекции №1, управление технологическим процессом представляет собой информационный процесс, обеспечивающий выполнение какого-либо материального процесса.
В наиболее общем случае АСУ ТП представляет собой замкнутую систему (рисунок 2.3), обеспечивающую автоматизированный сбор и обработку -информации, необходимой для оптимизации управления технологическим объектом в соответствии с принятым критерием, и реализацию управляющих воздействий на технологический объект. Технологический объект управления (ТОУ) — это совокупность технологического оборудования и реализованного на нем по соответствующим алгоритмам и регламентам технологического процесса. В зависимости от уровня АСУ ТП технологическим объектом управления могут быть технологические агрегаты и установки, группы станков, отдельные производства (цехи, участки), реализующие самостоятельный технологический процесс; производственный процесс всего предприятия, если управление им сводится к рациональному выбору и согласованию режимов работы агрегатов, участков и производств. Совместно функционирующие технологический объект управления и управляющая им АСУ ТП образуют АТК (автоматизированный технологический комплекс). Степень достижения поставленных целей в любой системе принято характеризовать с помощью, критерия управления. Критерием может быть технико-экономический показатель, например себестоимость выходного изделия при заданном качестве, производительность технологического объекта управления при заданном качестве выходного изделия, технологические показатели, например параметры технологического процесса, характеристики выходного изделия и т. п.
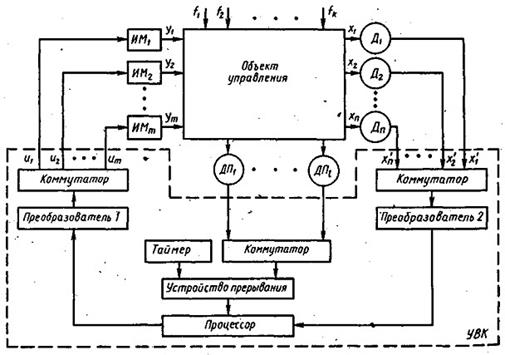
Рисунок 2.11 – Информационная структура АСУТП
В управляемом технологическом процессе можно выделить основные потоки информации, характеризуемые следующими группами параметров.
1. Измеряемые параметры Χ = (Χ 1, Χ 2,... Χ П), к которым относятся измеряемые, но неуправляемые параметры, зависящие от внешних факторов (параметры заготовок, характеристики технологического и вспомогательного оборудования, инструмента, оснастки и др.); выходные параметры, характеризующие качество выпускаемых изделий; выходные параметры, по которым непосредственно или путем вычислений определяют эффективность производственного процесса (производительность, экономичность и др.) или ограничения, наложенные на условия его протекания.
2. Управляемые параметры Υ = (Υ 1, Υ 2,..., Υ п), которые могут изменяться соответствующими исполнительными механизмами, уставками (заданиями) регуляторов и т. п.
3. Неизмеряемые и неуправляемые параметры ƒ = (ƒ 1, ƒ 2, …, ƒ п) — изменяющиеся со временем характеристики технологического оборудования, характеристики сырья, износ инструмента, отказ оборудования и др. Наличие подобных случайных факторов, воздействующих на объект управления, может значительно влиять на управляемую величину Υ и придают стохастический характер потокам требований на обслуживание. На вход управляющего вычислительного комплекса (УВК, в дальнейшем мы будем использовать более современный термин – промышленный компьютер - ППК) от датчиков (термопар, индуктивных датчиков, счетчиков готовой продукции и др.) поступает измерительная информация о текущих значениях параметров Χ, характеризующих ход технологического процесса (состояние и параметры заготовок, качество обработанных деталей, их количество и др.).
УВК (ППК) обрабатывает эту информацию в соответствии с принятым законом управления (алгоритмом управления), определяет управляющие воздействия u = (u1, u2, …, um), которые необходимо приложить к исполнительным механизмам для изменения управляемых параметров Υ, с тем, чтобы управляемый процесс протекал оптимальным образом.
Многие измерительные датчики вырабатывают свои сигналы в виде напряжения, силы тока, сопротивления, угла поворота и т. п., т. е. в форме непрерывного (аналогового) сигнала. Подводимые к исполнительным механизмам управляющие воздействия u должны вырабатываться в форме напряжений, т. е. также в аналоговой форме.
Так как УВК оперирует с цифровыми (дискретными) величинами, то поступающие на ее вход величины Χ должны предварительно быть преобразованы в цифровую форму, а вырабатываемые УВК величины управляющих воздействий — из цифровой формы в аналоговую, т. е. в соответствующие напряжения. Некоторые входные сигналы (например, выдаваемые конечными выключателями, фотореле и др.) и некоторые выходные управляющие сигналы (например, включение двигателей, сигнальные транспаранты и др.) имеют релейный характер.
Таким образом, в ППК должны входить преобразователи непрерывных величин в цифровые и обратно. С целью уменьшения объема оборудования преобразователи непрерывных величин в цифровые и обратно обычно выполняют многоканальными. Посредством коммутатора преобразователь поочередно подключается к каждому датчику и осуществляет преобразование соответствующей аналоговой величины в цифровую форму, после чего полученный в результате преобразования цифровой код вводится в память ППК.
Важным признаком АСУ ТП является осуществление управления в темпе протекания технологического процесса, т. е. в реальном масштабе времени. Понятие реального масштаба времени можно определить следующим образом. Если передача информации из исходного пункта в ЭВМ и ее обработка осуществляются во время работы машины, занятой решением другой задачи, и возвращение результатов в исходный пункт производится в минимально короткие сроки по тем же каналам без ощутимого перевеса в решении предыдущей задачи, то говорят, что этот процесс протекает в реальном времени. Более коротко можно сказать, что обработка информации идет в реальном времени, если время на запросы, обычно произвольное, ограничивается внешними условиями. Под внешними условиями понимают занятость передающих устройств и ЭВМ решением других задач, важность и срочность которых определяется соответствующей системой приоритетов.
В системе, функционирующей в реальном масштабе времени, информация, приходящая извне, либо воспринимается и обрабатывается на ЭВМ непосредственно в момент ее поступления, если ЭВМ не загружена работой или приоритет запроса самый высокий, либо фиксируется и поступает в обработку в зависимости от приоритета запрашиваемого абонента. В системе обработки информации в реальном масштабе времени для каждой такой задачи устанавливается реально необходимый промежуток времени, в течение которого соответствующий запрос должен быть обязательно выполнен. В зависимости от уровня запрашиваемого абонента в структуре технических средств и важности самого запроса при одинаковом уровне двух или большего числа абонентов устанавливаются приоритеты запросов абонентов. Указанной системой приоритетов определяется дисциплина очереди при решении любых задач управления.
Автоматическое распределение машинного времени открыло новые пути использования ЭВМ; позволяет абоненту вести непрерывный диалог с машиной; дает возможность нескольким абонентам “беседовать” друг с другом при посредничестве ЭВМ, использующей большой запас сведений, хранящихся в ее памяти, и высокую степень выполнения арифметических и логических операций.
Реализация целей в конкретных АСУ ТП достигается выполнением в них определенной последовательности операций и вычислительных процедур, в значительной степени типовых по своему составу и потому объединяемых в комплекс типовых функций АСУ ТП (рисунок 2.4).
Функции АСУ ТП подразделяют на управляющие, информационные и вспомогательные управляющие. Это функции, результатом которых является выработка и реализация управляющих воздействий на технологический объект управления. К управляющим функциям АСУ ТП относят регулирование (стабилизацию) отдельных технологических переменных, логическое управление операциями или аппаратами, программное логическое управление группой оборудования, оптимальное управление установившимися или переходными режимами или отдельными стадиями процесса, адаптивное управление объектом в целом, например управление участком станков с ЧПУ, оперативная коррекция суточных и сменных плановых заданий и др.
Информационные функции АСУ ТП — это функции системы, содержанием которых является сбор, обработка и представление информации для последующей обработки. К информационным функциям АСУ ТП относят централизованный контроль и измерение технологических параметров, косвенное измерение, вычисление параметров процесса (технико-экономических, внутренних переменных), формирование и выдала текущих и обобщающих технологических и экономических показателей оперативному персоналу АСУ ТП, подготовка и передача информации в смежные системы управления, обобщенная оценка и проверка состояния ГПС и его оборудования.
Вспомогательные функции состоят в обеспечении контроля за состоянием функционирования технических и программных средств системы. АСУ ТП как компонент общей системы управления промышленным предприятием предназначена для целенаправленного ведения технологических процессов и обеспечения смежных и вышестоящих систем управления оперативной и достоверной технико-экономической информацией. АСУ ТП, созданные для объектов основного и вспомогательного производства, представляют низовой уровень АСУП.
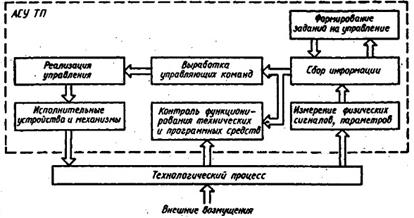
Рисунок 2.12 Обобщенная схема АСУТП (типовые функции)
Управление, основные понятия и определения. Понятие управления является одним из наиболее фундаментальных и всеобъемлющих в повседневной практике всех ячеек общества и различных организаций, общественно-государственной деятельности и особенно в современных системно-кибернетических науках, приближаясь в своей значимости к философским категориям.
Задача всякого управления – организация и реализация целенаправленного взаимодействия на объект управления. Управление представляет собой процесс изыскания и реализации мер по переводу объекта в желаемое состояние.
Понятие управления связано с такими понятиями как «объект управления», «воздействие», и «цель».
Объект управления - та часть окружающего мира, состояние которой представляет интерес для субъекта в данной ситуации и на которую он может воздействовать целенаправленно (рисунок 2.13). При выделении объекта управления должны выполняться, по крайней мере, 2 условия:
1 - на объект можно воздействовать;
2 - это воздействие в принципе может приблизить нас к осуществлению поставленных целей в объекте, т.е. изменить его состояние в желательном для нас направлении.
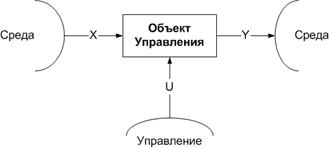
X – канал воздействия среды на объект
Y – канал воздействия объекта на среду
U – канал воздействия управления на объект
Рисунок 2.13 - Объект управления и его взаимодействие со средой и управлением.
Первым этапом всякого управления является выделение объекта и выявление каналов воздействий X, Y, U.
Понятие «воздействие» при решении задач управления рассматриваются только в информационном смысле. Выделение объекта управления и выделение каналов воздействия должно производиться только с точки зрения заданной цели управления.
Цель управления - совокупность условий, свойств и требований, которым должен удовлетворять объект управления.
Алгоритм управления - совокупность правил, методов и способов, позволяющих образовать (синтезировать) целенаправленное воздействие (управление), если известно действительное состояние объекта управления. Другими словами, алгоритм управления это инструкция о том, как добиваться целей управления в разных ситуациях. Наличие алгоритма управления является необходимым условием существования всякой системы управления.
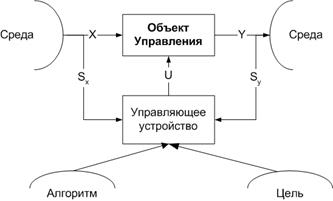
При объединении объекта управления и управляющего устройства, реализующего алгоритм управления, получаем систему управления. Системой управления называют такую совокупность объекта управления и управляющего устройства, процесс взаимодействия которых приводит к выполнению поставленной цели управления (рисунок 2.14).
 ,
,  – каналы получения информации об объекте управления.
– каналы получения информации об объекте управления.
Рисунок 2.14 - Система управления
Цель и алгоритм управления по отношению к системе управления имеют внешний характер. Это связано с тем, что цель управления и алгоритм определяются не данной системой управления, а другой более высокого уровня.
Т.о. всякое управление характеризуется четырьмя аспектами:
1) канал управляющего воздействия U на объект;
2) каналы, по которым получается информация об объекте, необходимая для синтеза управляющего воздействия (, );
3) цель управления;
4) алгоритм управления.
Субъект управления - конкретные лица, управляющие системы коллективов, организаций, предприятий, ведомств, государств.
Для того чтобы объекты достигли поставленных целей, субъект должен осуществлять управляющие воздействия, приводящие к желаемым изменениям управляемых параметров в объектах, обусловленные целями или заданной программой.
Таким образом, управление - это процесс, направленный на достижение определенных целей на основе имеющейся информации.
Формально управление можно представить как результат работы алгоритма  в зависимости от целей Z* и полноты информации I:
в зависимости от целей Z* и полноты информации I:
 ,
,
где: I – информация; Z* - цели управления.
Возможны другие определения управления. Управление - это воздействия, направленные на поддержание или улучшение функционирования управляемого объекта в соответствии с управляемой программой или целью управления.
Управление - это целенаправленный процесс переработки информации, основой которого является целеполагание как завершающий этап формирования целей действий.
Для производственно-технологических систем (ПТС) управление - это процесс такого целенаправленного воздействия на объект, в результате которого объект переходит в требуемое (целевое) состояние. Организация, способ и вид воздействия Ua на объект связаны с определенной структурой управляющей системы Sy. Тогда формальное определение управления имеет вид:
 ,
,
Где: I – информация; Z*- цели управления; Sy – структура управляющей системы,
Ua– способ и вид воздействия на объект.
Задачи первичной обработки информации в АСУТП. К числу основных задач первичной обработки информации относятся:
1. аналого-цифровое, цифро-аналоговое и цифро-импульсное преобразование.
2. линеаризация выходных сигналов датчиков с нелинейными и слабо нелинейными статическими характеристиками.
3. фильтрация выходных сигналов датчиков от высокочастотных помех, искажающих полезный сигнал.
4. проверка исходной информации на достоверность и коррекция результатов измерений.
5. коррекция показаний датчиков при отклонении условий измерения от расчетных (градуировочных).
6. расчет действительных значений измеряемых величин в физических единицах измерения по кодам АЦП (аналитическая градуировка датчика).
7. экстраполяция значений измеряемых величин на интервале времени между очередным и последующим опросами датчиков и т.п.
Изучение алгоритмов и составление программ первичной обработки информации на ЭВМ (фильтрации, прогноза, коррекции показаний первичных преобразователей), расчета обобщенных показателей рассматривается в практических занятиях по дисциплине. Ниже рассмотрим некоторые из этих алгоритмов.
Аналого-цифровое, цифро-аналоговое, цифро-импульсное преобразования. Информация от датчиков с унифицированными выходными сигналами (токовым, частотным и др.) поступает на вход аналого-цифрового преобразователя контроллера, где преобразуется из аналоговой формы в цифровую (аналого-цифровой), точнее, в двоичный код с разрядностью, определяемой разрядностью АЦП. Происходящее при этом преобразование называется квантованием входного сигнала по уровню в математическом виде будет рассмотрено далее, в одной из лекций. Выходной сигнал в цифро-аналоговом преобразователе контроллера преобразуется в аналоговую (цифро-аналоговую) или импульсную (цифро-импульсную) форму. Аналоговые сигналы (0-5, 4-20 mA и др.) обычно поступают для регистрации на вторичные приборы или электропневмопреобразователи, на пневматические исполнительные механизмы регулирующих органов. Импульсные сигналы используются для управления электрическими исполнительными механизмами постоянной скорости. У них в качестве привода применяются электродвигатели, а интенсивность управляющих воздействий (при постоянной скорости вращения вала электродвигателя) определяется изменяющейся скважностью импульсов в блоках выдачи управляющих сигналов контроллеров.
Линеаризация выходных сигналов датчиков. Линеаризация сигналов осуществляется для датчиков с нелинейными статическими характеристиками. Нелинейность статических характеристик связана с физическими свойствами чувствительных элементов (сильфонов, мембран, термосопротивлений и др.) или с методом измерения соответствующих величин (например, измерение расхода по методу переменного перепада давления).
Одним из наиболее рациональных методов линеаризации, используемых при программировании, является аппроксимация статической характеристики датчика х = F(х*) полиномом степени n:
Pn(х) = аn x*n + аn-1 x*n-1 + … + а1 x* + а0 (2.8)
Наибольшая возможная степень полинома Pn(х) выбирается из условия
Pn(х) – х | ≤  max, (2.9)
max, (2.9)
где max – допустимая погрешность аппроксимации.
Линеаризация выходных сигналов датчиков с квадратичными статическими характеристиками (дифманометров – расходомеров) осуществляется по алгоритму извлечения квадратного корня, описанному ниже.
Фильтрация измеряемых величин от помех. Методы фильтрации с целью исключения влияния высокочастотных помех в выходных сигналах датчиков на результаты измерений основаны на гипотезе о том, что спектр случайного процесса ε (t) содержит более высокие частоты, чем спектр полезного сигнала х(t). Внешне фильтрация проявляется в том, что реализация процесса Z(t) становится более плавной, чем исходная реализация y(t). Отсюда второе название той же процедуры – сглаживание.
Схема фильтрации приведена на рисунке. 2.15.
D – датчик; Ф – фильтр; X(t) – полезный сигнал; ε (t) – помеха;
y(t) –выходной сигнал датчика, содержащий помеху;
Z(t) – отфильтрованное значение сигнала
Рисунок 2.15 - Схема фильтрации
Операция фильтрации может осуществляться аппаратурно, т.е. с помощью специальных технических устройств, или программно на ЭВМ, как это обычно имеет место в АСУТП.
Качество фильтрации оценивается средним квадратичным отклонением сигналов Z(t) и х(t)
 , (2.10)
, (2.10)
где М – символ математического ожидания.
Фильтры. Алгоритмы фильтрации. Область применимости. При построении оптимального или близкому к нему фильтра корреляционная функция полезного сигнала  , являющегося случайным стационарным процессом, аппроксимируется одной экспонентой:
, являющегося случайным стационарным процессом, аппроксимируется одной экспонентой:
 , (2.11)
, (2.11)
где  - дисперсия полезного сигнала; α – коэффициент экспоненты, аппроксимирующий корреляционную функцию полезного сигнала.
- дисперсия полезного сигнала; α – коэффициент экспоненты, аппроксимирующий корреляционную функцию полезного сигнала.
Искажающая полезный сигнал помеха ε (t), действующая на входе датчика, также является случайным стационарным процессом, некоррелированным сигналом х(t), имеющим нулевое математическое ожидание и корреляционную функцию вида
 , (2.12)
, (2.12)
где k и m – параметры помехи, определяющие соответственно ее размах (дисперсию) и частотный спектр (отношение частоты помехи к частоте полезного сигнала).
Рассматривается помеха более высокочастотная, чем полезный сигнал, поэтому всегда m> 1.
В большинстве конкретных случаев получаемые оценки статических характеристик полезного сигнала и, тем более, помехи слишком приближены, чтобы принимать для их корреляционных функций более точные, чем экспоненты аппроксимации, поэтому эти аппроксимации и приняты для дальнейшего анализа.
Фильтрация методом экспоненциального сглаживания. В непрерывном варианте экспоненциальный фильтр представляет собой элементарно реализуемое одноемкостное звено с передаточной функцией вида
 , (2.13)
, (2.13)
где γ – коэффициент экспоненциального сглаживания (параметр настройки фильтра), выбираемый из условия минимизации средней квадратичной погрешности работы фильтра.
Погрешность работы фильтра определяется по формуле
 . (2.14)
. (2.14)
Используя (2.14), можно определить оптимальное значение параметра настройки фильтра γ ОПТ, т.е. значение, соответствующее условиям:

 и
и  .
.
Реализуемый экспоненциальный фильтр должен иметь γ > 0, что возможно при условии 1/m < k ≤ m.
В дискретной форме алгоритм фильтрации по методу экспоненциального сглаживания представляет собой рекуррентное соотношение вида;
 , (2.15)
, (2.15)
где у(t) – текущее значение входа в фильтр; Z(t –  ) – значение выхода фильтра в момент предыдущего опроса датчика.
) – значение выхода фильтра в момент предыдущего опроса датчика.
Использование соотношения (2.15), независимо от требуемого интервала выдачи значения Z(t), позволяет для хранения промежуточных значений Z(t) и настроечного параметра γ фильтра в оперативной памяти ЭВМ выделить всего два слова.
Погрешность работы дискретного фильтра экспоненциального сглаживания определяется по формуле
 . (2.16)
. (2.16)
При заданном периоде опроса датчика  значение параметра
значение параметра  определяется минимизацией погрешности
определяется минимизацией погрешности  по γ.
по γ.
Области применимости фильтров скользящего среднего и экспоненциального сглаживания в плоскости параметров k и m приведены на рисунке 2.16.
 Непрерывное скользящее среднее
Непрерывное скользящее среднее
 Дискретное скользящее среднее
Дискретное скользящее среднее
 Непрерывное экспоненциальное сглаживание
Непрерывное экспоненциальное сглаживание
 Дискретное экспоненциальное сглаживание
Дискретное экспоненциальное сглаживание
Рисунок 2.16 Области применимости фильтров скользящего среднего и экспоненциального сглаживания
Виды контроля технологического процесса. Общей функцией автоматического контроля является фиксация хода технологического процесса во времени и непрерывное (периодическое) сравнение параметров процесса с заданными.
Различают следующие виды контроля:
1. Контроль технологических процессов в нормальном режиме.
2. Контроль качества выпускаемой продукции.
3. Контроль процесса при выходе его на номинальный уровень мощности.
4. Контроль исправности оборудования.
5. Контроль включения/выключения оборудования.
6. Контроль производительности оборудования.
7. Контроль над процессом в аварийных режимах.
Основная операция контроля состоит в том, что для каждого контролируемого параметра x(ti) в момент времени t необходимо проверять выполнение условия:
 ,
,
где  - число параметров, mi – нижний допустимый предел изменения i-го параметра, Mi – верхний допустимый предел.
- число параметров, mi – нижний допустимый предел изменения i-го параметра, Mi – верхний допустимый предел.
Все контролируемые параметры можно разбить на три группы:
1. Параметры, требующие непрерывного контроля.
2. Параметры, нуждающиеся в периодическом контроле.
3. Свободные показатели процесса.
Непрерывный контроль из-за дискретного характера процесса измерения в автоматических системах осуществить невозможно, так как встает вопрос о шаге дискретизации (период опроса).
Этот шаг должен выбираться из условия:
 .
.
Чтобы максимум изменения параметра на отрезке времени t0 не превышало некоторой заданной положительной величины  . С учетом этого условия непрерывного контроля сводится к проверке неравенства:
. С учетом этого условия непрерывного контроля сводится к проверке неравенства:
 .
.
К параметрам, нуждающимся в периодическом контроле, относятся такие параметры, для которых в некоторый момент времени допустим выход за установленные пределы. Для таких параметров на j – ом шаге контроля проверяется условие:
 ,
,
где t0 – усредненное значение за период времени  ,
,  - начало отсчета времени.
- начало отсчета времени.
Свободные показатели процесса – это некоторые функции параметров, которые необходимо контролировать:  ,
,  . Обычно на практике свободные показатели требуют периодического контроля.
. Обычно на практике свободные показатели требуют периодического контроля.
Контроль технологического процесса в нормальном режиме. В зависимости от того к какой группе принадлежит технологический параметр проводится соответствующий контроль (непрерывный либо периодический).В случае выхода за установленные пределы фиксируется время, номер параметра или соотношения, предел которого был нарушен и величина отклонения от предела со знаком «-». Кроме того оператор, ведущий процесс, должен иметь возможность проконтролировать текущее значение любого технологического параметра. Такой вид контроля называется контролем по запросу. Таким образом, контроль технологии в нормальном режиме сводится к определению значения величин и сравнению их величин с заранее установленными величинами (пределами).
Контроль качества выпускаемой продукции. Данный вид контроля осуществляется теми же методами, однако в большинстве случаев показатели качества нуждаются в периодическом контроле.
Контроль процесса при выходе его на номинальный уровень мощности. Основная задача состоит в обеспечение безопасности, поэтому предельные значения могут отличатся от предельного значения в нормальном режиме. Для этих целей используется специальная подпрограмма.
Контроль исправности оборудования. При выходе их строя оборудования предусматривается ручное или автоматическое включение резервного оборудования.
Контроль включения/выключения оборудования осуществляется по дискретным сигналам, характеризующим текущее состояния оборудования. Например, при заполнении резервуара, он отключается и подключает пустые резервуары.
Контроль производительности оборудования осуществляется на основе технико-экономических показателей.
Контроль над процессом в аварийных режимах. Предусматривается автоматическая сигнализация, защита и блокировка. Возможно распознавание аварийных ситуаций и автоматический вывод из такой ситуации.
.
Основная литература
1. Автоматическое управление в химической промышленности: Учебник ВУЗов./Под ред. Е.Г.Дудникова. - ML: Химия, 1987. 168 с, ил.
Дополнительная литература
2. Федоров Ю.Н. Справочник инженера по АСУТП: Проектирование и разработка. – M.: Инфра-Инженерия, 2008. – 928 с.
3. Нестеров А.Л. Проектирование АСУТП: Методическое пособие. Книга 1. – СПб.: Издательство ДЕАН, – 2006. – 757 с
4. Нестеров А.Л. Проектирование АСУТП: Методическое пособие. Книга 2. – СПб.: Издательство ДЕАН, – 2009. – 944 с
5. Шапкарина Г.Г. Преобразование и передача технологической информации в системах управления. Ч 1. Преобразование технологической информации в системах управления. Учебное пособие
6. R.C.Dorf, R.H.Bishop. Modern Control Systems: International Edition, 11 Ed. Pearson Higher Education, 2008