Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Выбор кинематического режима режущего аппарата
|
|
На качество среза стеблей существенное влияние оказывает соотношение скоростей ножа и машины.
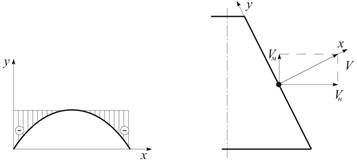
При работе режущего аппарата любая точка ножа совершает движение с абсолютной скоростью V, равной

где Vм – скорость машины;
Vн – скорость ножа.
То есть 

Разложим скорость машины Vм и скорость ножа Vн на составляющие по осям x и y, т.е. на направления вдоль и поперек лезвия:


Составляющие абсолютной скорости обозначим через Vл и Vр.

Разделим первое уравнение на второе:
При заданном угле α и в зависимости от соотношения между скоростью машины Vм и скоростью ножа Vн возможны три случая изменения составляющей Vл абсолютной скорости:
- tg λ > 0
- tg λ = 0
- tg λ < 0
Поскольку знаменатель в уравнении (*) всегда положителен, то названные три случая возможны при:
(**) 

Согласно сделанным ранее замечаниям (**) первый случай будет иметь следующее графическое представление: 

Это случай характеризуется уменьшением отношения  , при этом составляющая Vл, действующая вдоль лезвия, увеличивается и будет направлена к нижнему основанию сегмента. Стебли будут стремиться идти к створке режущей пары, поэтому выскальзывание стеблей из створки будет исключено. В связи с этим, необходимо добиваться того, чтобы скорость в течение хода ножа, как можно дольше оставалась направленной к нижнему основанию сегмента.
, при этом составляющая Vл, действующая вдоль лезвия, увеличивается и будет направлена к нижнему основанию сегмента. Стебли будут стремиться идти к створке режущей пары, поэтому выскальзывание стеблей из створки будет исключено. В связи с этим, необходимо добиваться того, чтобы скорость в течение хода ножа, как можно дольше оставалась направленной к нижнему основанию сегмента.
Во втором случае будет следующее: 
Здесь возможно движение стебля или к верхнему или к нижнему основанию. Возможно частичное выскальзывание стеблей из створки.
В третьем случае: 

Здесь составляющая Vл абсолютной скорости направлена из створки к верхнему основанию. Стебли будут стремиться выйти из створки – тут самые хорошие условия для выскальзывания стеблей.
Таким образом, исходя из сказанного, для выбора кинематического режима режущего аппарата и угла α сегмента следует использовать выражение:
.
15.Определение усилия, необходимого для подъема режущего аппарата.

Здесь: Р – усилие подъёма режущего аппарата, которое требуется определить (другими словами, это усилие, которое должен развивать гидроцилиндр для обеспечения подъема режущего аппарата);
Рп – усилие натяжения пружины механизма уравновешивания;
Р1 – усилие, действующее в звене и являющееся результатом действия сил Р2 и Р3;
Р2 – вес рамы и штанги, приложенной в центре масс;
Р3 – часть веса пальцевого бруса. В свою очередь, Р3 = Р3 ′ + Р3 ″, где
Р3 ′ - сила давления внутреннего башмака на землю, которая не должна превышать 240-340 Н,
Р3 ″ - сила давления наружного башмака на землю, которая не должна превышать 100-150 Н.
Для определения силы Р составим уравнение суммы моментов относительно точки А:
 .
.
Отсюда  .
.
Однако усилие Р1 здесь не известно. Определим его, составив сумму моментов сил относительно точки D:
 ,
,
откуда  .
.
Подставив значение Р1 в уравнение для Р, окончательно получим:
