Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Порядок выполнения лабораторной работы
|
|
Содержание работы
1. Изучение командного окна ППП Matlab и его вычислительных и графических возможностей.
2. Изучение приложений Control System Toolbox и Simulink и использование их для моделирования систем автоматического управления.
3. Изучение возможностей системы по созданию и использованию m -файлов.
Порядок выполнения лабораторной работы
I. Изучение ядра Matlab:
Задание 1.Вычислите три произвольно выбранных числовых выражения, используя командное окно MATLAB. Одно из них должно быть длинным, т.е. построено с использованием операции переноса. Выполнение задания иллюстрируется рис. 1.


Рис.1. Выполнение задания 1
Задание 2.Создайте несколько массивов различными способами. Выполнение задания иллюстрируется рис. 2.

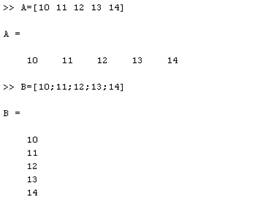
Рис.2. Выполнение задания 2
Задание 3.Выведите на экран список переменных рабочего пространства и сохраните рабочее пространство в файле с произвольным именем, затем удалите все переменные из рабочего пространства и убедитесь, что оно очищено. Снова загрузите сохраненное рабочее пространство и выполните с ними произвольные допустимые действия. Выполнение задания иллюстрируется рис. 3.


Рис.3. Выполнение задания 3
Задание 4. Создайте график некоторой функции с различными
диапазонами и шагом изменения параметра(ов). Наблюдайте поведение системы на осциллографе (Scope) и выведите график на печать.
 Установите сетку на координатную плоскость и сохраните любую из характеристик в файле типа Bitmap. Откройте этот файл в редакторе Paint. Выполнение задания иллюстрируется рис. 4.
Установите сетку на координатную плоскость и сохраните любую из характеристик в файле типа Bitmap. Откройте этот файл в редакторе Paint. Выполнение задания иллюстрируется рис. 4.

Рис.4. Выполнение задания 4
Задание 5.Создайте m -файл любой выбранной вами функции, сохраните его и используйте для вычислений. Выполнение задания иллюстрируется рис. 5.

Рис.5. Выполнение задания 5
II.Изучение приложения ControlSystemToolbox:
Задание 6.Создайте объекты с передаточными функциями, выбранными в соответствии с вариантом. Выполнение задания иллюстрируется рис. 6-10.
:

| 
| 
|


Рис.6. Создание объектов по заданию6
а) б)


в) г)
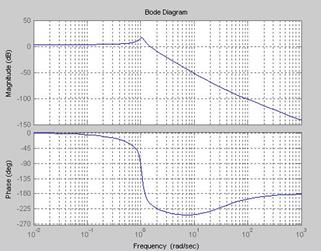
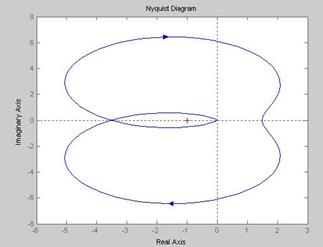
Рис.7 а). Переходная функция системы; б) Весовая функция системы; в) Амплитудная частотная характеристика системы; г) Логарифмические амплитудная и фазовая частотные характеристики системы
 Задание 7.Создайте модель системы
Задание 7.Создайте модель системы

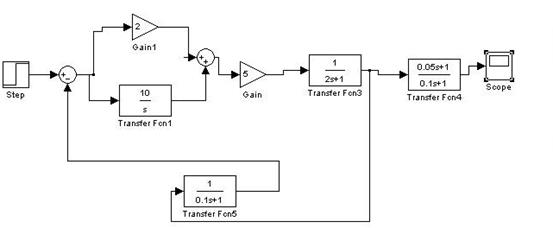
Рис. 8. Выполнение задания 7
III. Изучение приложения Simulink
Задание 8
Составьте структурную схему и смоделируйте в среде Simulink объект первого порядка, математическое описание которого задано в виде передаточной функции.
| Вариант | 
| 
| 
| 
|

| 13.8 мин | 24 ˚ С | 68 ˚ С |
1. Заданная передаточная функция
 .
.
2. Поскольку  , то при входном воздействии в виде единичной ступенчатой функции (функции Хэвисайда)
, то при входном воздействии в виде единичной ступенчатой функции (функции Хэвисайда)  из передаточной функции получаем
из передаточной функции получаем

или
 ,
,
откуда
 .
.
3. Реализация полученного дифференциального уравнения при нулевых начальных условиях в среде Simulink приведена на рис. 9.


Рис.9. Модель уравнения первого порядкаи реакция системы на единичную ступенчатую функцию при нулевых начальных условиях
Реакция системы при минимальном и максимальном значении начальных условий иллюстрируется рис. 10 и 11 соответственно.

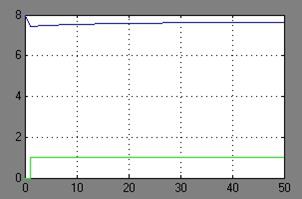
Рис. 10. Реакция системы при н.у.= − 1 Рис. 11. Реакция системы при н.у.= 8
Реакция системы при входном сигнале в виде функции Хэвисайда с параметрами, заданными начальными условиями, иллюстрируется рис. 12

Рис. 12. Реакция системы при входном сигнале в виде функции Хэвисайда с параметрами, заданными начальными условиями
Задание 9
Составьте структурную схему и смоделируйте в среде Simulink объект, описываемый уравнением второго порядка

с заданными постоянными коэффициентами, начальными условиями и ограничениями, выбранными в соответствии с вариантом.
1. Исходные данные:
| Вариант | 
| 
| 
| 
|

| 
| 
| 
|
| Вариант | 
| 
| min | max |

| 40 % | 0.3 атм | 8.3 атм |
2. Составляем дифференциальное уравнение, описывающее изменение  в зависимости от изменения управляющей функции
в зависимости от изменения управляющей функции  :
:

(1)
3. Представляем модель системы, описываемой данным дифференциальным уравнением, с использованием метода понижения порядка производной.
Этап I. Разрешаем дифференциальное уравнение (1) относительно высшей производной

(2)
Для представления левой части дифференциального уравнения используем цепочку из двух интеграторов (дифференциальное уравнение второго порядка!), показанную на рис. 13.

Рис. 13. Структурная реализация левой части уравнения (1.4)
Этап II: Предположив, что в точках А, B и С значения  , и y известны в любой момент времени, умножаем их на соответствующие коэффициенты и сложим с правой частью дифференциального уравнения.
, и y известны в любой момент времени, умножаем их на соответствующие коэффициенты и сложим с правой частью дифференциального уравнения.
Этап III. Вводим начальные условия, которые определяют единственность решения дифференциального уравнения.
4. Определяем показатель демпфирования в объекте второго порядка. Для уравнения (1) передаточная функция будет иметь вид

(3)
Уравнение (3), приведенное к стандартному виду
 ,
,
станет следующим:
 , (4)
, (4)
откуда постоянная времени  , коэффициент относительного затухания (показатель демпфирования)
, коэффициент относительного затухания (показатель демпфирования)  , т.е. система является апериодической.
, т.е. система является апериодической.
5. Выполняем моделирование системы в среде Simulink. Реализация модели при нулевых начальных условиях и реакция системы на единичное ступенчатое управление приведены на рис. 14.


Рис. 14. Структура системы второго порядка и ее реакция на единичное ступенчатое воздействие
Устанавливаем заданные начальные условия и параметры управляющего сигнала и повторяем моделирование. Его результаты приведены на рис. 15.

Рис. 15. Реакция системы при входном сигнале в виде функции Хэвисайда с параметрами, заданными начальными условиями
%Выполнение задания 1%
a=66; b=34; c=1.25; d=100;
a*b
s=(a+b*c*a)/2*d
z=a+b+c...
+a*2+d/2
%Выполнение задания 2%
A=[10 11 12 13 14]
B=[10; 11; 12; 13; 14]
C=eye(4)
D=[10 11 12; 13 14 15; 16 17 18]
%Выполнение задания 3%
who
whos
%Выполнение задания 4%
a=4;
b=7;
kvadr(a, b)
%Выполнение задания 5%
a=(0: 2*pi/100: 2*pi);
b=cos(x);
plot(a, b)
%Выполнение задания 6%
w1=tf([0.4 12], [5 8 7 8])
w2=tf([8 0], [8 11])
w3=tf([9], [1 0 0])
%Выполнение задания 7%
w1=tf(2, 1)
w2=tf(10, [1 0])
w3=tf(5, 1)
w4=tf(1, [2 1])
w5=tf([0.05 1], [0.1 1])
w6=tf(1, [0.1 1])
w7=parallel(w1, w2)
w8=series(w3, w4)
w9=series(w7, w8)
w10=feedback(w6, w9)
sys=series(w5, w10)
Выводы по результатам работы: В ходе лабораторной работы были получены начальные сведения о пакетах ControlSystemToolbox и Simulink системы Matlab и навыки работы с ними:
§ изучено командное окно ППП Matlab и его вычислительные и графические возможности (вычисление числовых выражений, создание графика функции.
§ изучены приложения Control System Toolbox и Simulink и использованы для моделирования систем автоматического управления.(переходная характеристика, весовая функция, АЧХ, логарифмические АЧХ и ФЧХ, моделирование объектов первого и второго порядков).
§ изучены возможностей системы по созданию и использованию m -файлов.
|