Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Векторная диаграмма амплитуд вынужденных колебаний рамы балансировочного станка
|
|
Рис.3
где  - масштаб дисбаланса в плоскости коррекции ПК1, г-мм/дел.;
- масштаб дисбаланса в плоскости коррекции ПК1, г-мм/дел.;
здесь  измеряется числом делений (дел) шкалы индикатора 4
измеряется числом делений (дел) шкалы индикатора 4
Балансировка ротора в плоскости коррекции ПКП производится аналогично после установки ротора на опорах А и В станка так, чтобы плоскости коррекции ПК1 и ПКП поменялись местами. Отметим, что горизонтальное положение ротора 1 выставляют с помощью пружины 3.
При балансировке ротора способом исключений выполняют следующие три операции..
О перация I: Определение угла коррекции.
Ротор устанавливается на станке так, чтобы исключаемая плоскость ПКП проходила через ось качания маятниковой рамы; ротор приводится во вращение и записывается максимальная амплитуда #Хё1ач колебаний рамы от начального дисбаланса  г Далее к ротору Р плоскости коррекции ПК1 прикрепляется вспомогательная произвольная масса
г Далее к ротору Р плоскости коррекции ПК1 прикрепляется вспомогательная произвольная масса  последовательно в точках 1, 2, 3. 4 и т.д., полученных при делении окружности на равные части (рис. 4, а).
последовательно в точках 1, 2, 3. 4 и т.д., полученных при делении окружности на равные части (рис. 4, а).
Векторная диаграмма амплитуд вынужденных колебаний рамы балансировочного станка
z 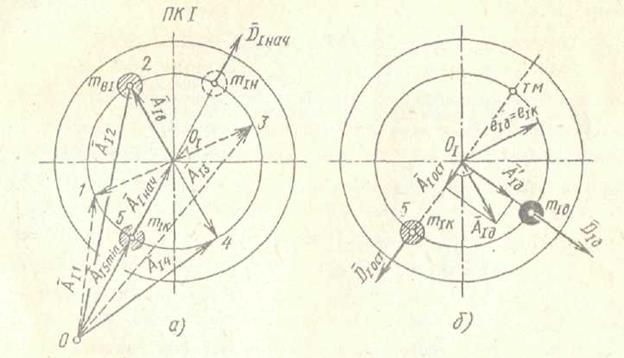
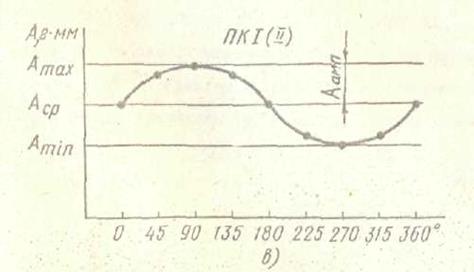
Рис.4
При каждом положение массы, т ротор приводится во вращение и измеряется максимальная амплитуда  (i= 1, 2, 3, 4,...) вынужденных колебаний рамы балансировочного станка, которая записывается в протоколе испытаний или на плоскости коррекции балансируемого ротора.
(i= 1, 2, 3, 4,...) вынужденных колебаний рамы балансировочного станка, которая записывается в протоколе испытаний или на плоскости коррекции балансируемого ротора.
Правильное положение корректирующей массы mIk совпадает с таким положением вспомогательной массы mIи, при котором амплитуда при резонансе получается наименьшей (например, в точке 5 амплитуда AI5min)•
Операция 2: Определе н ие величины корректирующей массы
Величина корректирующей массы mIk определяется или путем подбора или вычислением по формуле. В последнем случае масса mIи устанавливается с диаметрально противоположной стороны от найденного положения для массы mIk и с тем же эксцентриситетом; измеряется максимальная амплитуда  колебаний маятниковой рамы. Тогда
колебаний маятниковой рамы. Тогда
где  - амплитуда, пропорциональная начальному дисбалансу ; - амплитуда, пропорциональная сумме дисбалансов масс mIkи mIи.
- амплитуда, пропорциональная начальному дисбалансу ; - амплитуда, пропорциональная сумме дисбалансов масс mIkи mIи.
Операция 3 (вариант I): Определение точности балансировки
После установки корректирующей массы mIk в правильное положение измеряется остаточная амплитуда AIocтколебаний рамы. Точность балансировки оценивается величиной остаточного дисбаланса:
Где  - эксцентриситет корректирующей массы mIk
- эксцентриситет корректирующей массы mIk
Операци я 3 (вариант 2). С целью определения точности балансировки укрепим в плоскости коррекции ПК1 произвольную массу известной величины т под углом 90 к массе mIkс тем же эксцентриситетом eIд=eIk(рис.4.6). Разгоняем ротор и на выбеге измеряем при резонансе максимальную амплитуду AIдколебаний от внесенного дисбаланса DIд=mIдeIд(г-мм). Находим масштаб дисбаланса
KDI=mIдeIд/AIд
и остаточный дисбаланс
KIост=KDIAIост
(Операция Э (вариант 3).
Для измерения значения остаточного дисбаланса в контролируемой плоскости коррекции ПК1 (или ПК11) установим в этой плоскости массу mIdдисбаланс которой в 5 - 10 раз больше допустимого DIдоп? для данной плоскости коррекции. Перемещая массу mIд окружности одного радиуса на угол 45°, записываем показания индикатора для восьми положений (0°, 415°, 90°,.... 315°) массы пока не будет полного кругового обхода по данной окружности.
Измерения проводят для каждой плоскости коррекции и строят графики в координатах угол и значение дисбаланса как показано на рис. 4, в (индексы плоскостей коррекции опущены).
Среднее арифметическое измеренных величин пропорционально значению устанавливаемого в плоскости коррекции дисбаланса Dд
где Amax и Amin максимальное и минимальные показания индикатора значении дисбалансов; Acp- отрезок на рисунке, пропорциональный значению дисбаланса Dд; K - коэффициент пропорциональности
Значение остаточного дисбаланса в плоскости коррекции пропорционально амплитуде
Следовательно, остаточные дисбалансы в плоскостях коррекции ПК1 и ПК11 будут равны
После балансировки ротора остаточные дисбалансы в плоскостях коррекции ПК1 и ПНИ не должны выходить за пределы верхних значений допустимых дисбалансов, определенных для каждой плоскости кор-■ рекции согласно ГОСТ 22061-76, т.е. следует выдержать следующие условия:

ЛИТЕРАТУРА
1. Щепетильников В.А..Козлянинов Т. П., Самсаев Ю.А. Балансировка
вращающихся тел. Учебное пособие М.: РИО МИИТ.1976 - 58 с.
2. Самсаев Ю.А, Динамическая балансировка жёстких роторов
(Заочная школа-семинар)/ Автоматизация и современные технологии,
1992 - № 5 - С.13 – 20.
3. Справочник по балансировке Под ред. М.Ё.Левита: Машиностроение, 1992 - 464 с.
|