Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Структурний аналіз кінематичної схеми важільного механізму
|
|
1.1. Розрахунок ступеню рухомості
Важільний механізм (рис. а) має 5 рухомих ланок, n = 5. Усі ланки утворюють поміж собою п`ять шарнірів у точках O, A, B, C і D, дві поступальні пари у точках A та E. Ці кінематичні пари належать до п`ятого класу, тому p 5 = 7. За формулою Чебишева підрахуємо ступінь рухомості:
W = 3 n – 2 p 5 – p 4 = 3·5 – 2·7 = 1.
1.2 Визначення класу механізму.
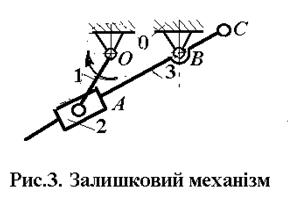
Послідовно виконуємо структурний аналіз механізму (рис.1). З цієї мети по-перше відділяємо структурну групу з ланок 5 і 4 (рис.2). Після ії відокремлення у залишковому


кінематичному ланцюгу (рис.3) зберігається колишній ступінь рухомості W = 3 n – 2 p 5 – p 4 = =·3 – 2·4 = 1. Це вказує на слушність відокремлення групи, яка є групою другого класу другого виду. Від залишкового механізму відділяється наступна група з ланок 2 і3 3 3 (рис.4, а).
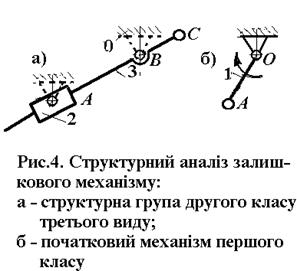
Вона є групою другого класу третього виду. У складі кінематичного ланцюгу залишається тільки початковий механізм першого класу (рис.4, б).
Таким чином структурна формула всього механізму має вигляд 1 (0, 1)® 2 (2, 3) ®2 (4, 5). За її видом механізм є механізмом другого класу.