Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Лабораторна робота № 2.
|
|
Вивчення конструкції і основних оптичних характеристик зорової труби теодоліта 3Т2КП.
Мета роботи: Вивчити конструктивні особливості зорової труби теодоліта 3Т2КП та визначити її основні оптичні характеристики: поля зору, якості зображення в трубі різних предметів, збільшення труби, коефіцієнта ниткового далекоміру тощо.
2.1.Основні метрологічні відомості.
Сучасні зорові труби є складними оптико - механічними пристроями і містять об`єктив, окуляр, сітку ниток, кремальєру (рис.2.1).Вони будують пряме або обернене збільшене зображення. В зорових трубах з прямим зображенням між окуляром і кремальєрою розташована система призм Аббе 6, яка разом з окуляром формує пряме зображення (Рис.2.2). Для спрямування зорової труби на точку візування на ній має бути візирна вісь, положення якої задається двома точками і повинна на час візування лишатися незмінною. Візирна вісь - уявна пряма, що проходить через задню головну точку об`єктива і центр перехрестя сітки ниток.
Перехрестя сітки ниток на фонізображення об`єктива, на який наведена зорова труба, повинно бути виразним без паралаксу. Для цього сітка ниток повинна розташовуватися в тій площині, в якій об`єктив формує дійсне зображе- ння об`єкту.
| 2.1 |
| 2.2. |

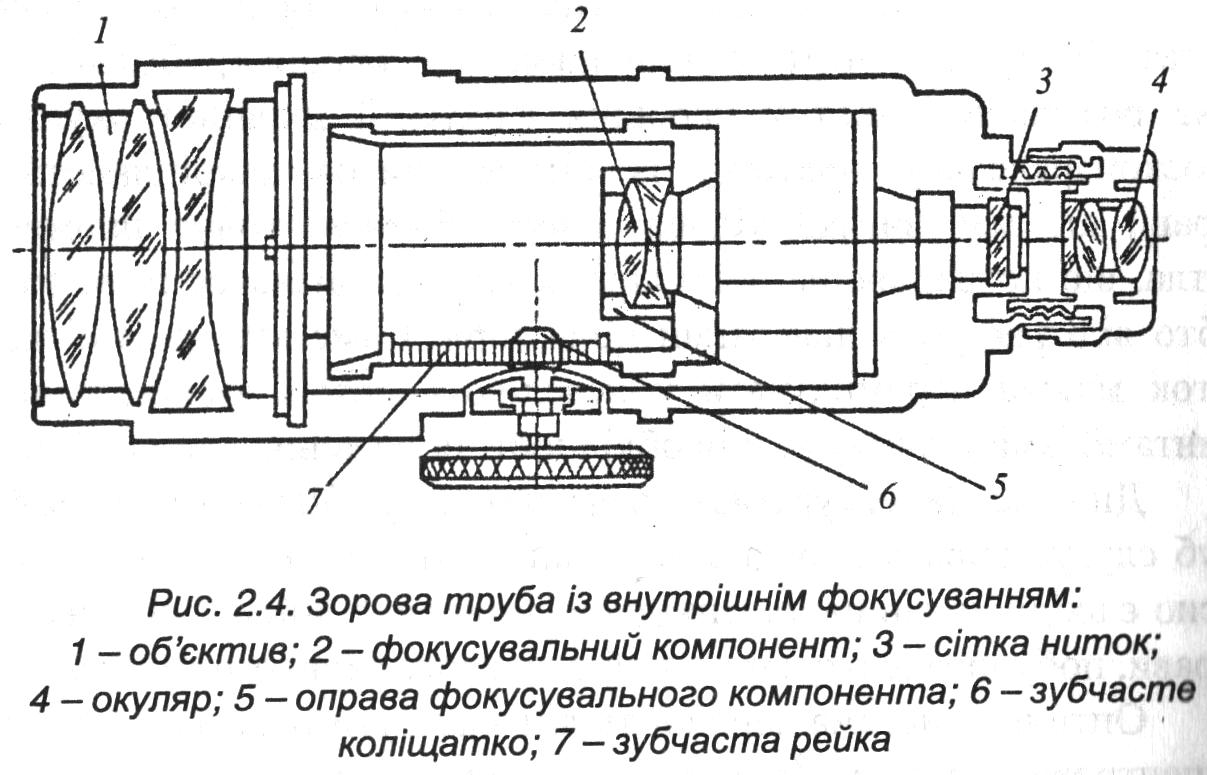
Вхідною зіницею слугує оправа переднього компонента об`єктива 2. Вихідною зіницею є дійсне зображення оправи, що побудоване окуляром поблизу свого заднього фокуса. Оптична вісь зорової труби бути ретельно і точно відцентрована. Центри кривини всіх сферичних поверхонь оптичної системи повинні міститися на одній прямій, яку називають оптичною віссю зорової труби. Крім цього існує геометрична вісь, що збігається з віссю симетрії оправ зорової труби. Всі три названі осі в зоровій трубі повинні збігатися. Фокусуючий компонент змінює еквівалентну фокусну віддаль оптичної системи так щоб дійсне зображення візирної цілі формувалося у передній фокусній площині окуляра 4 (рис2.3.) та в площині перехрестя сітки ниток. Лінзи фокусуючого компонента, які закріплені в оправі 5, пересувають уздовж оптичної осі зорової труби за допомогою зубчастої пари.
| Рис. 2.3. |

Ретельно шліфовані напрямні закріпляють у корпусі труби. Під час руху фокусуючого компонента оптична вісь його деталей у межах зазору може змінювати своє положення відносно оптичної осі зорової труби. Внаслідок цього під час руху фокусуючого компонента лінія візування може не збігатися з оптичною віссю (рис. 2.3). Це негативне явище треба врахувати під час візування на невеликих віддалях, коли фокусуючий компонент переміщається на значну величину.
Тому, при спостереженнях під час виконання високоточних геодезичних вимірювань зміна фокусування зорової труби небажана.
Об`єктив – най важливий оптичний вузол (рис.2.3). Він будує зображення візирної цілі у задній фокусній площині і визначає його якість.
Основними характеристиками об`єктива є фокусна віддаль f ′, відносний отвір Д/ f (де Д – діаметр вхідної зіниці); кут поля зору і роздільна здатність. Фокусна віддаль різних об`єктивів має інтервал від f = 100….500 мм, відносний отвір має межи від 0, 2 -0, 1, тобто через об`єктив проходять широкі пучки променів або паралельних до оптичної осі або під малим кутом до неї.
Поле зору об`єктива має 1 - 2°. Тому в зорових трубах необхідно виправляти передовсім сферичну та поздовжню хроматичну аберацію і кому. В зорових трубах сучасних теодолітів для цього застосовують п’яти лінзові або чотири лінзові об`єктиви (рис. 2.4, г).
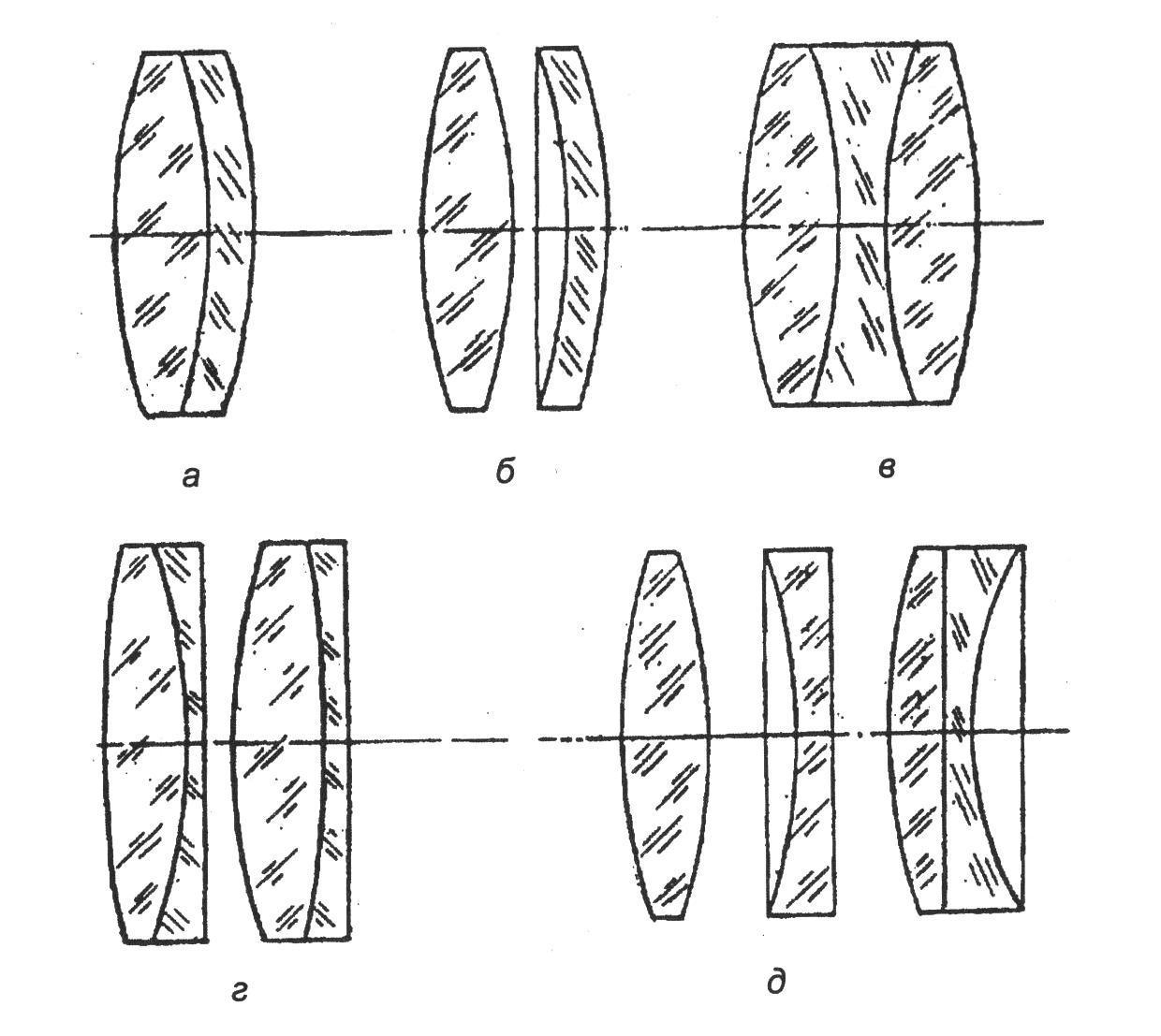 Рис. 2.4. Об`єктиви зорових труб: а – двох лінзовий у теодолітів типу Т30, б – двох лінзовий з повітряним зазором, в – три лінзовий, г –у теодолітів, д –у теодолітів типу 2Т2.
Рис. 2.4. Об`єктиви зорових труб: а – двох лінзовий у теодолітів типу Т30, б – двох лінзовий з повітряним зазором, в – три лінзовий, г –у теодолітів, д –у теодолітів типу 2Т2.
Окуляр – це оптична система призм, через яку розглядують зображення візирної цілі, що утворив об`єктив. Основні характеристики окуляра: фокусна віддаль f ′ ок, відносний отвір Д′ / f ′ ок (де Д′ - діаметр вихідної зіниці), поле зору окуляра. Для f ′ ок приймають значення від 10 до 40 мм (через 5 мм) і 50 мм. Кут поля зору окуляру складає 40 - 60°. 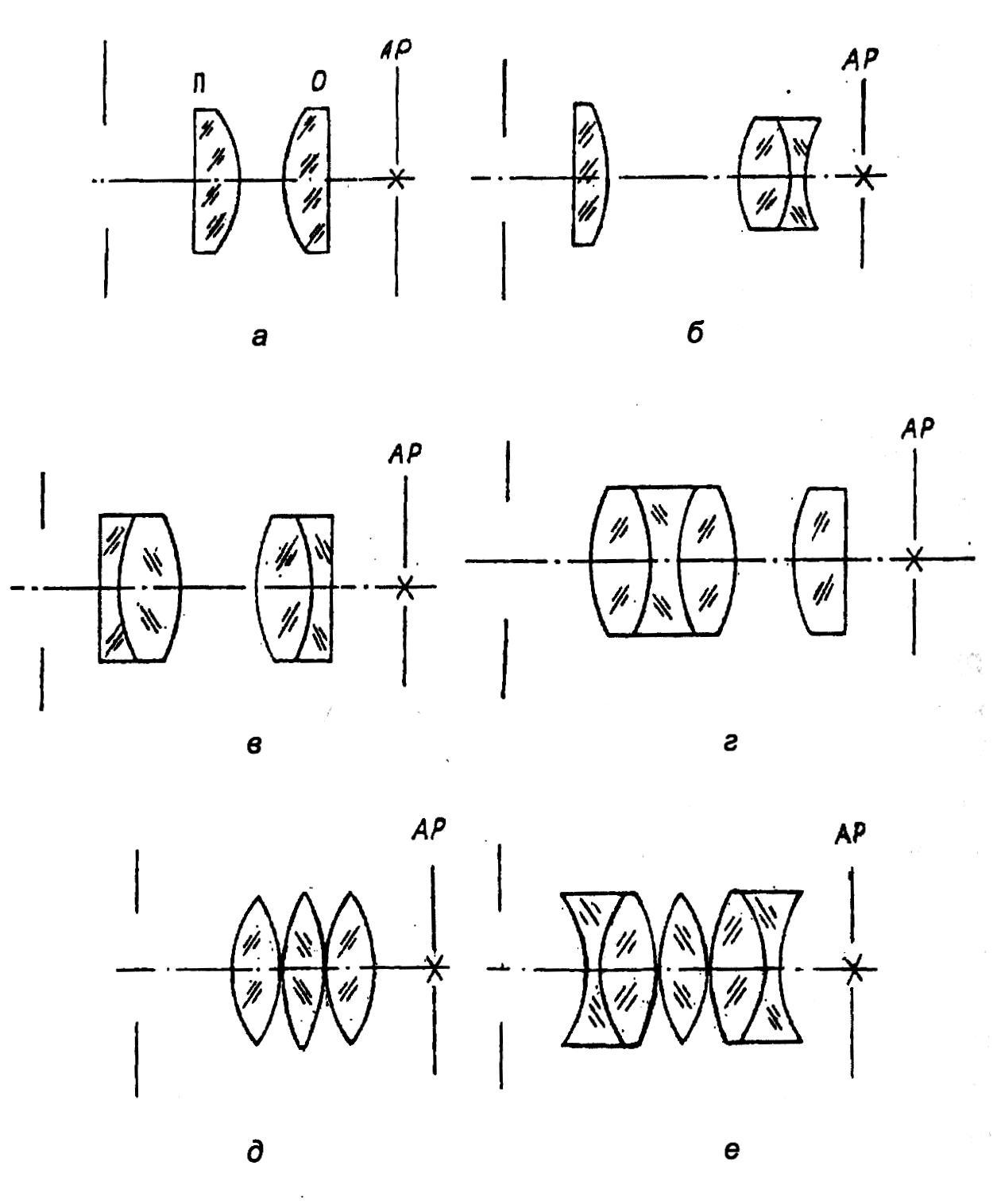 Рис.2.5. Окуляри зорових труб: а- Рамсдена, б – Кельнера, в – симетричний, г – отоскопічний, д – у теодолітів типу 3Т2, е – у теодолітів типу 2Т2.
Рис.2.5. Окуляри зорових труб: а- Рамсдена, б – Кельнера, в – симетричний, г – отоскопічний, д – у теодолітів типу 3Т2, е – у теодолітів типу 2Т2.
Оскільки кут поля зору окуляра у десятки разів більший від кута поля зору об`єктива, то промені, що йдуть до окуляра, виходять за межи параксіальної області(рис.2.6). Тому велику увагу приділяють виправленню недоліків зображень окулярів. Окуляри є складною оптичною системою, яка містить дві частини: польову лінзу або колектив – П і очну лінзу (колектив) – О. Польова лінза, яку розташовують поблизу сітки ниток, слугує для звуження пучків променів, що йдуть від об`єктива. В теодоліті 3Т2КП подано три - лінзовий окуляр, який добре виправляє сферичну і хроматичну аберацію, його і застосовують в зорових трубах, що мають велике збільшення.
Основними оптичними характеристиками зорових труб є збільшення Г, кут поля зору та її роздільна здатність. Збільшення зорової труби показує, в о скільки разів збільшуються видимі розміри предмету, якщо його розглядають через зорову трубу, порівняно із розмірами того самого предмету, видимого неозброєним оком (рис.2.6). 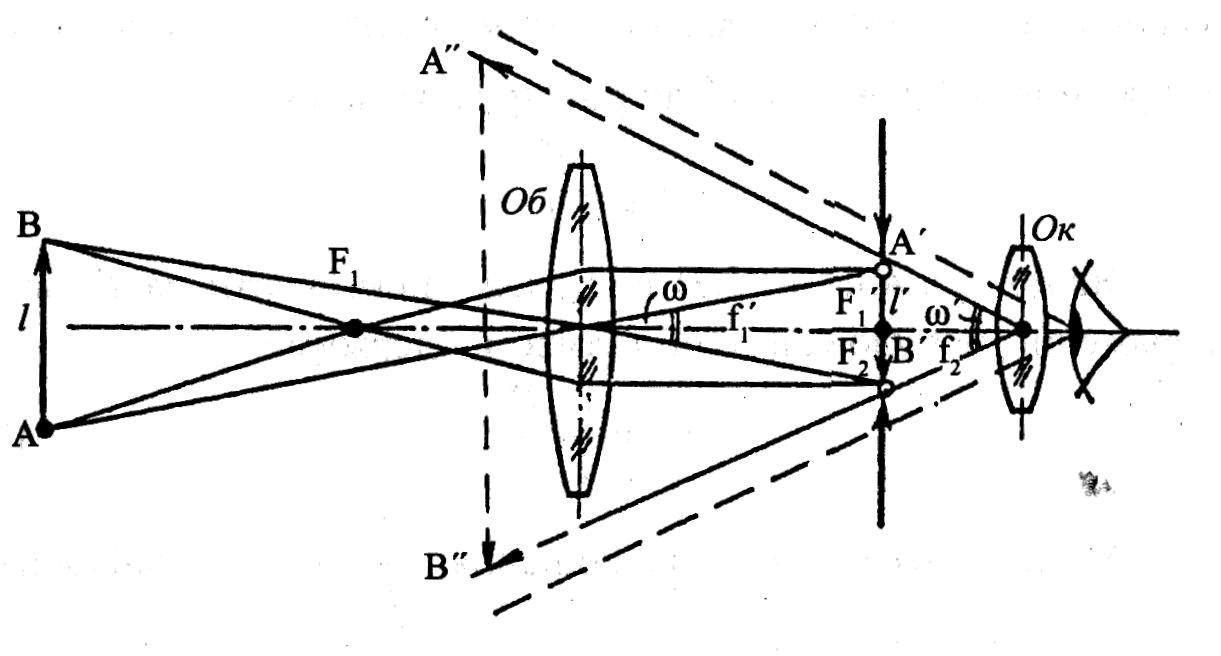
Рис.2.6. Побудова збільшеного зображення цілі зоровою трубою.
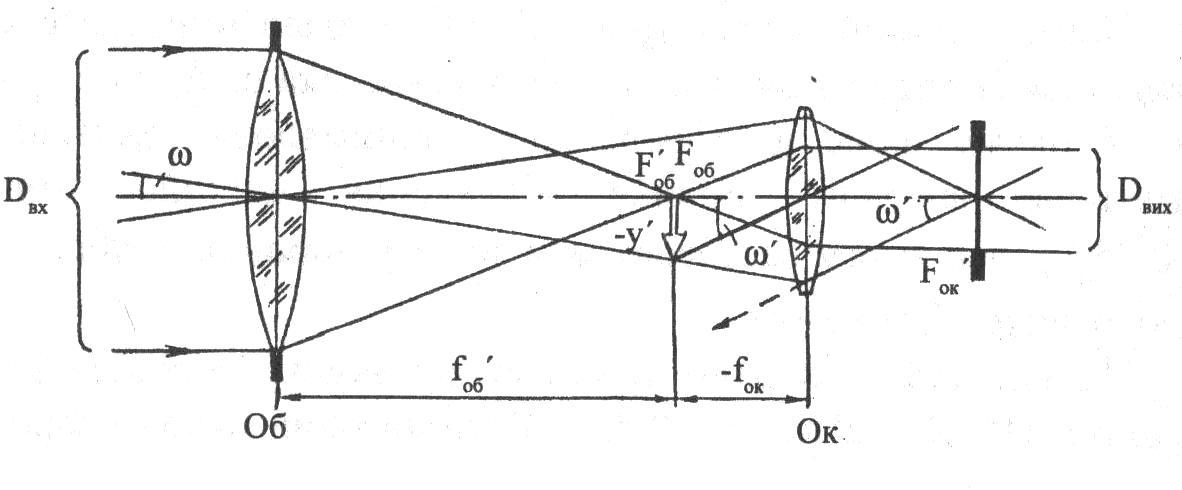 Рис.2.7. Збільшення зорової труби.
Рис.2.7. Збільшення зорової труби.
Збільшення обчислюють за формулою (рис. 2.7)
Г =  ≈
≈  . (2.1)
. (2.1)
де  кут, під яким видно зображення предмету в зоровій трубі;
кут, під яким видно зображення предмету в зоровій трубі;  - кут під яким видно предмет із середині вхідної зіниці. Так, як
- кут під яким видно предмет із середині вхідної зіниці. Так, як
 =
=  ,
,  , то
, то
Г = =  . (2.2) Враховуючі, що діаметр вхідної зіниці – Д вх. відноситься до діаметра вихідної зіниці – Д вих. як фокусні віддалі об`єктива і окуляра, то збільшення дорівнює
. (2.2) Враховуючі, що діаметр вхідної зіниці – Д вх. відноситься до діаметра вихідної зіниці – Д вих. як фокусні віддалі об`єктива і окуляра, то збільшення дорівнює
Г = =  =
=  . (2.3) Поле зору зорової труби – це обмежений конусною поверхнею простір, який оглядають через зорову трубу,
. (2.3) Поле зору зорової труби – це обмежений конусною поверхнею простір, який оглядають через зорову трубу,
установлену на нескінченість (рис. 2.8).
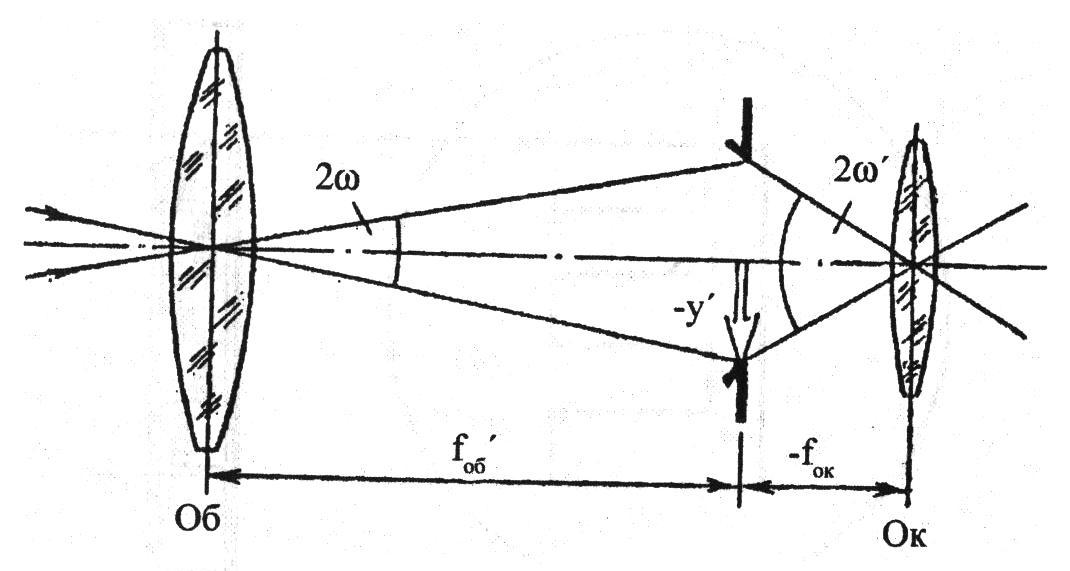
Рис.2.8. Поле зору в зоровій трубі.
Для того, щоб визначити величину дійсного поля зору, її треба навести на віддалену ціль і сумістити з нею один, а потім другий край поля зору діафрагми. Суміщаючи, відлічують по горизонтальному або вертикальному кругу, залежно від того повертають горизонтальний круг, або вертикальний відповідно. Різниця протилежних від ліків дає кут поля зору.
Роздільна здатність зорової труби – це можливість давати окреме зображення кожної з двох сусідніх точок предмету. Вона характеризується найменшим кутом r, під яким дві сусідні точки ще видні, як кожну окремо. Роздільна здатність неозброєного ока, що приймається кутом r, дорівнює 60″. Тоді роздільна здатність зорової труби дорівнює r =  , (2.4) де
, (2.4) де  Щоб око не втомлювалося,
Щоб око не втомлювалося,  приймають в 1, 5 – 2 рази більшим від номінального збільшення
приймають в 1, 5 – 2 рази більшим від номінального збільшення  Таке збільшення називають корисним, тобто
Таке збільшення називають корисним, тобто
 = 2
= 2  і
і  . (2.5)
. (2.5)
Для визначення роздільної здатності зорової труби застосовують спеціальну таблицю з однаковою шириною чорних і білих смужок. Цю таблицю встановлюють на певній віддалі від труби. Роздільна здатність зорової труби визначається із залежністю:
r =  (2.6)
(2.6)
де а – відстань між білими і чорними смужками, яку ще можна розрізняти. Її вказують у спеціальній таблиці;  віддаль від теодоліта до цієї таблиці.
віддаль від теодоліта до цієї таблиці.
2.2. Приклади визначення оптичних характеристик зорової труби.
2.2.1. Визначення якості зображення труби.
Зорова труба повинна давати чіткі, достатньо яскраві, не пофарбовані і подібні зображення предметів при їх розглядувані. Якість зображення оцінюють при розглядувані правильних геометричних фігур (трикутника, кола, квадрата, інших), які накреслені на білому папері і зафарбовані чорною тушшю.
Зображення повинні бути подібними, виразними, пофарбованими у чорному кольору і тільки по краях зображень помітний легкий блакитно – фіолетовий відтінок, що вказує на відсутність хроматичної і сферичної аберації.
2.2.2. Визначення кута поля зору труби.
Існують два способи визначення: перший - за допомогою горизонтального і вертикального круга теодоліта, другий – за допомогою нівелірної рейки.
У першому способі встановлюємо теодоліт і приводимо його у робоче положення. Наводимо трубу на віддалений чіткий предмет правим або нижнім краєм діафрагми поля зору і робимо відлік  по лімбу.
по лімбу.
Потім повертаємо трубу із алідадою і наводимо на той самий предмет лівим або верхнім краєм діафрагми і знову беремо відлік з лімбу  . Кут поля зору – 2W знаходимо за формулою
. Кут поля зору – 2W знаходимо за формулою
2W =  , (2.7)
, (2.7)
де  – відлікові по лімбу горизонтального круга (при визначенні кута по горизонту) і по лімбу вертикальному кругу (при визначенні кута по прямовисній лінії).
– відлікові по лімбу горизонтального круга (при визначенні кута по горизонту) і по лімбу вертикальному кругу (при визначенні кута по прямовисній лінії).
Наприклад, при наведенні правим краєм діафрагми на точку відлік по горизонтальному кругу дорівнює
 = 211°43′, а лівим краєм = 210° 13′.
= 211°43′, а лівим краєм = 210° 13′.
Тоді кут поля зору дорівнює 2W = = 1° 30′.
У другому способі наводимо трубу вертикальною ниткою сітки на рейку, встановлену на 30 – 50 м від теодоліту і відлічуємо з точністю 1 см по верхньому – В і нижньому – Н краях діафрагми поля зору. Кут поля зору знаходять за формулою
2W =  , (2, 8)
, (2, 8)
де  - верхній і нижній відліки по рейці, в см; S – віддаль від об`єктива зорової труби до рейки, в см;
- верхній і нижній відліки по рейці, в см; S – віддаль від об`єктива зорової труби до рейки, в см;  .
.
Приклад визначення кута 2W наведено в табл. 2. 1.
Таблиця 2.1.
| № визначення | Число поділок по рейці у полі зору труби (В -Н), см | Віддаль до рейки, 
| Кут поля зору 2W, град |
| 2 000 | 1, 5 | ||
| 3 000 | 1, 5 |
Додатково кут поля зору знаходять приблизно за формулою
2W ≈  , (2.9)
, (2.9)
де Г – збільшення труби. Точність візування при цьому дорівнює
t =60″ / Г. (2.10)
2.2.3 Визначення збільшення зорової труби.
Збільшення зорової труби має важливу характеристику і визначається за формулою (рис.2.7)
Г = = =  ,
,
де  - кут, під яким видно зображення в зоровій трубі,
- кут, під яким видно зображення в зоровій трубі,
ω - кут, під яким видно той же предмет неозброєним оком,
 - фокусна віддаль еквівалентної лінзи об`єктива,
- фокусна віддаль еквівалентної лінзи об`єктива,
 окуляра,
окуляра, 
 - діаметр вхідного отвору об’єктива,
- діаметр вхідного отвору об’єктива,
 - діаметр вихідної зіниці труби.
- діаметр вихідної зіниці труби.
Збільшення зорової труби визначають різними способами.
1 спосіб – за допомогою нівелірної рейки.
Для цього встановлюємо теодоліт на штатив і в 5 -7 м від нього нівелірну рейку. Дивимося двома очами: одним безпосередньо на рейку, другим в зорову трубу. Відмічаємо, яке число поділок, що видимі неозброєним оком проектуються на одну цілу поділку, видиму в зорову трубу. Це число буде відповідати збільшенню зорової труби (рис. 2.9). Для контролю ці визначення повторюють два – три рази. При другому визначенні порівнюють число поділок рейки, якому відповідає група з трьох поділок, а при третьому визначенні – з п  яти поділок.
яти поділок.
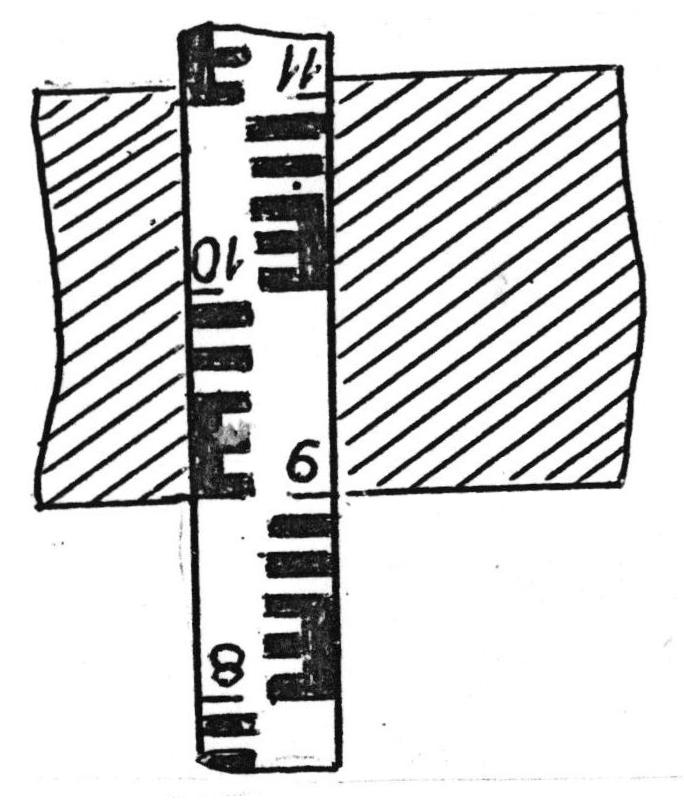
Рис.2.9. Схема визначення збільшення зорової труби (V =  ).
).
Результати визначення записують в табл..2.2.
Таблиця 2.2.
| № визначення | Число поділок рейки, які спостерігають, см | Збільшення труби, кратне(×) Г =  . .
| ||
| В трубі - n1 | Без труби – n2 | |||
Середнє  .
.
2 Спосіб – через порівняння діаметрів зіниць входу і виходу. Зіницею входу  зорової труби є оправа об`єктива, внутрішній діаметр якого вимірюють циркулем і масштабною лінійкою з точністю 0, 2 мм.
зорової труби є оправа об`єктива, внутрішній діаметр якого вимірюють циркулем і масштабною лінійкою з точністю 0, 2 мм.
Для визначення діаметра зіниці виходу, трубу фокусують на нескінченність і направляють її об’єктивом на світлий фон.
За окуляром встановлюють екран з кальки і повільно переміщують його, добиваючись чіткого зображення яскравого кола, яке є зіницею виходу –  .
.
Вимірюють діаметр виходу  з точністю 0, 1 мм циркулем і масштабною лінійкою.
з точністю 0, 1 мм циркулем і масштабною лінійкою.
Вимірюють  два – три рази і записують в табл. 2.3.
два – три рази і записують в табл. 2.3.
Таблиця 2.3.
| № визначення | Діаметр зіниць, мм | Збільшення труби, кратне (×): Г =  . .
| ||
| Вхідної -
| Вихідної 
| |||
| 36, 0 | 1, 50 | 24, 0 | ||
| 36, 0 | 1, 46 | 24, 7 | ||
| 36, 0 | 1, 44 | 24, 8 | ||
Середнє 24, 5×
3 Спосіб – через вимірювання фокусних віддалей об`єктива і
окуляра.
В цьому способі вимірюють лінійкою фокусну віддаль об`єктива і окуляра. Фокусна віддаль об`єктива  – це віддаль від об`єктива до виправних гвинтів сітки ниток труби, фокусна віддаль окуляра
– це віддаль від об`єктива до виправних гвинтів сітки ниток труби, фокусна віддаль окуляра  - це віддаль від окуляра до виправних гвинтів сітки. Збільшення обчислюють за формулою:
- це віддаль від окуляра до виправних гвинтів сітки. Збільшення обчислюють за формулою:
Г=  . Вимірювання віддалей і
. Вимірювання віддалей і  виконують два – три рази і обчислюють середнє збільшення труби.
виконують два – три рази і обчислюють середнє збільшення труби.
Запис результатів визначення збільшення ведеться в таблиці аналогічно другому способу.
2.2.4 Визначення кутової віддалі бісектора сітки ниток зорової труби.
Визначення кутової віддалі бісектора сітки ниток виконують по лінійці, яку нерухомо закріплюють горизонтально і приблизно перпендикулярно до візирної осі труби на віддалі 10 – 15 м від теодоліта. За положеннями ниток бі-сектора труби відносно лінійки відлічують  і
і  з точністю 0, 2 – 0, 3 мм. Кутову віддаль бісектора визначається за формулою
з точністю 0, 2 – 0, 3 мм. Кутову віддаль бісектора визначається за формулою
∆ =  ( - ), (2.11) де і
( - ), (2.11) де і  відліки відповідно по лівій та правій нитках бісектора на лінійці, мм;
відліки відповідно по лівій та правій нитках бісектора на лінійці, мм;  - віддаль від лінійки до осі обертання теодоліта, м.
- віддаль від лінійки до осі обертання теодоліта, м.
2.2.5. Визначення правильності руху фокусуючої лінзи зорової труби.
Для визначення правильності руху фокусуючої лінзи встановлюємо теодоліт на штатив і приводимо в робоче положення. Вибираємо віддалений чіткий предмет на висоті осі обертання візирної труби. Старанно наводимо візирну вісь труби на предмет і закріплюємо її. У створі та перпендикулярно до променя візування на віддалі приблизно 10 м закріплюємо нерухомо горизонтальну лінійку так, щоб вона находилась на висоті візирного променя. Без зміни положення труби, фіксуємо її по лінійці і робимо відлік  по вертикальній нитці і лінійці з точністю 0.2– 0.5 мм. Переводимо трубу через зеніт і знову наводимо її на тої самий предмет, закріплюємо її і, змінюючи фокусування, робимо другий відлік по лінійці. Похибка руху фокусуючої лінзи – δ 1 для віддалі 1 = 10 м обчислимо за формулою
по вертикальній нитці і лінійці з точністю 0.2– 0.5 мм. Переводимо трубу через зеніт і знову наводимо її на тої самий предмет, закріплюємо її і, змінюючи фокусування, робимо другий відлік по лінійці. Похибка руху фокусуючої лінзи – δ 1 для віддалі 1 = 10 м обчислимо за формулою
δ =  , (2.12) де і - відлікові по лінійці при крузі ліво (К Л) і крузі право (К П), мм;
, (2.12) де і - відлікові по лінійці при крузі ліво (К Л) і крузі право (К П), мм;  – віддаль від лінійки до осі обертання теодоліта, м. Потім послідовно збільшуємо віддаль
– віддаль від лінійки до осі обертання теодоліта, м. Потім послідовно збільшуємо віддаль  від теодоліта до лінійки до 15, 20, 25 і 30 м і кожний раз визначаємо значення δ і. За отриманими значеннями δ і будуємо графік залежності відносно віддалі візування до лінійці, за яким у майбутніх роботах визначимо величину поправки.
від теодоліта до лінійки до 15, 20, 25 і 30 м і кожний раз визначаємо значення δ і. За отриманими значеннями δ і будуємо графік залежності відносно віддалі візування до лінійці, за яким у майбутніх роботах визначимо величину поправки.
δ ″
5 10 15 20 25 30 35 
Рис. 2.10. Графік змінювання похибки фокусування від віддалі візування.
2.2.6. Визначення постійної ниткового віддалеміра зорової труби.
Горизонтальне прокладення лінії на місцевості, що виміряне нитковим віддалеміром визначається за формулою = (100L + ∆)  , (2, 13)
, (2, 13)
де L – різність від ліків по вертикальній рейці між від -далемірними штрихами сітки ниток, в см (рис. 2.4),  – кут нахилу візирного променя, ∆ - невідома поправка за відхилення коефіцієнта віддалеміра від 100. Методика визначення постійної віддалеміра ∆ наступна. На рівній місцевості вибирають базис довжиною 120 –160 м і поділяють його на 6 – 8 інтервалів, кратних довжині мірної стрічки або рулетки.
– кут нахилу візирного променя, ∆ - невідома поправка за відхилення коефіцієнта віддалеміра від 100. Методика визначення постійної віддалеміра ∆ наступна. На рівній місцевості вибирають базис довжиною 120 –160 м і поділяють його на 6 – 8 інтервалів, кратних довжині мірної стрічки або рулетки. 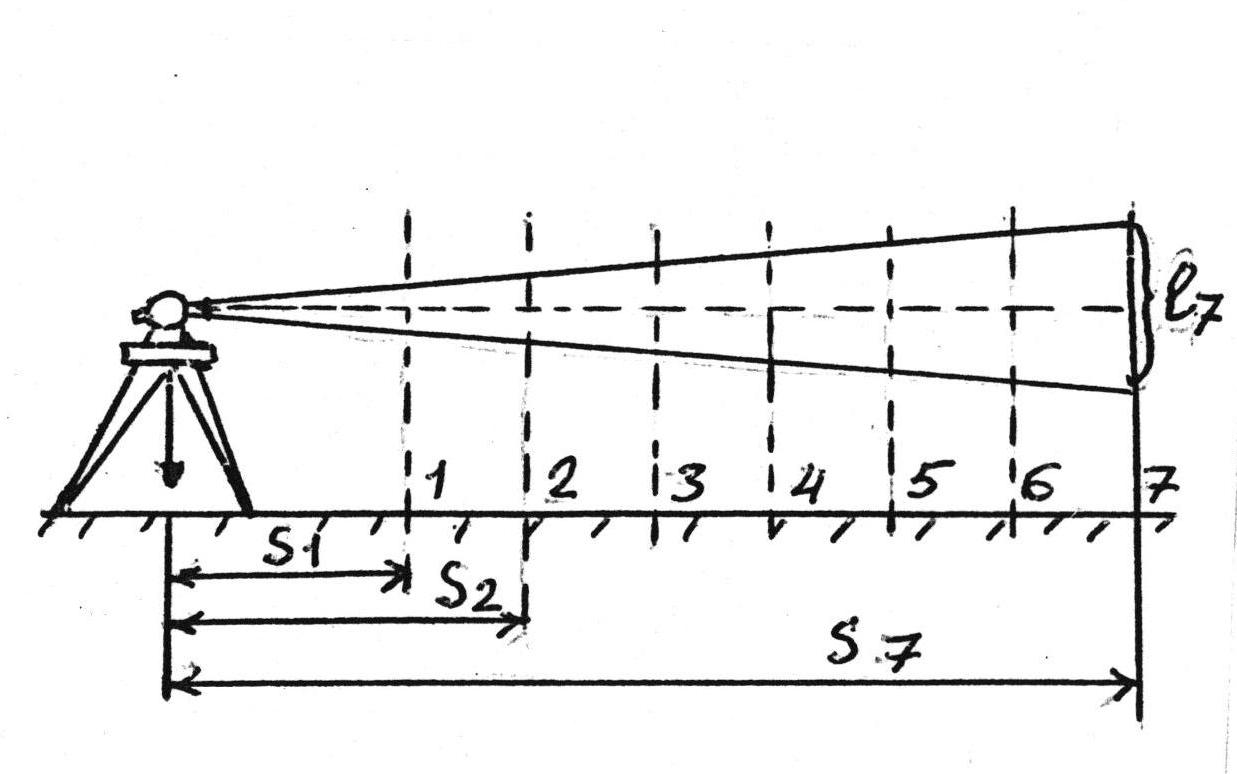 Рис. 2.11. Схема визначення постійної ниткового віддалеміра.
Рис. 2.11. Схема визначення постійної ниткового віддалеміра.
Кожен інтервал базису вимірюють стрічкою з відносною похибкою не менш 1: 1500.
На одному кінці базису (рис.2.11) встановлюємо теодоліт, а рейку встановлюємо прямовисно і послідовно на всіх точках.
Візуємо на рейку з таким рахунком, щоб кут нахилу візирної осі  був близько до 0° з відхиленням не більш 20′.
був близько до 0° з відхиленням не більш 20′.
Тоді горизонтальне прокладення  буде дорівнювати
буде дорівнювати 
= 100L + ∆ і звідки ∆ =  - 100L. (2.14)
- 100L. (2.14)
Для визначення поправки ∆ довжину кожного інтервалу вимірюють по рейці чотирма прийомами, а результати записують в табл.2.5.
Результати визначення поправки ∆. Таблиця 2.5.
| № інтервалу | Довжина інтервалу | Інтервал, що виміряний нитковим від далекоміром | 100× Lср, м | ∆ ср, м | |||
| прямо | зворотно | ||||||
| чорна | червона | чорна | червона | ||||
| 1 2 3 4 5 6 | 20, 02 40, 01 59, 98 80, 02 100, 00 120, 02 | 20, 0 40, 0 59, 9 80, 0 99, 8 119, 9 | 20, 0 40, 0 59, 8 80, 0 99, 8 119, 9 | 19, 9 40, 0 59, 8 79, 9 99, 8 119, 9 | 20, 0 40, 0 59, 9 80, 0 99, 8 119, 9 | 19, 96 40, 00 59, 85 79, 97 99, 80 119, 9 | +0, 06 +0, 01 +0, 13 +0, 05 +0, 20 +0, 12 |
| ∆ ср, м | ||||||||||
| ∆ = 0, 12 | ||||||||||
0, 3
0, 2
0, 1
0 20 40 60 80 100 120 

Рис. 2.12. Графік змінювання поправки ∆ від віддалі  .
.
Середні різниці ∆ ср. наносять на графік (рис.2.12), у залежності від віддалі . Отримані точки з`єднають прямими лініями і потім проводять осередню лінію за умовою, що сума площ відхилень від середньої лінії повинна бути мінімальною, а осередня лінія повинна проходити через початок координат.
Збудований графік використовують для визначення поправки ∆ на різних віддалях і введення її у віддалі, які вимірюють нитковим віддалеміром теодоліта. Наприклад, якщо = 87 м, то поправка до виміряної віддалі склала ∆ = 0, 12 м.
2.3. Порядок виконання лабораторної роботи.
1. Накреслити зорову трубу теодоліта 3Т2КП (або зробіть ксерокопію) і виділити основні її модулі: об`єктив, окуляр, фокусуючий елемент, сітку ниток, систему призм Аббе, візирну вісь труби. 2. Виконайте опис основних особливостей окремих модулів зорової труби. 3. Проконтролюйте якість зображення зорової труби. 4. Визначите кути поля зору труби згідно прикладу 2.2. 5. Визначите збільшення труби згідно прикладу 2.3. 6. Визначите кутову віддаль бісектора сітки ниток труби згідно прикладу 2.4. 7. Визначите правильність руху фокусуючого елемента труби згідно прикладу 2.5. 8. Визначите поправку ∆ ниткового віддалеміра труби згідно прикладу 2.6. 9.Дайте висновок про стан зорової труби теодоліта.
2.4. Контрольні запитання.
1. Назвіть, які осі має зорова труба теодоліта?
2. Перелічите особливості об`єктива і окуляра труби?
3. За якими формулами визначають збільшення зорової труби?
4. Що являє собою поле зору труби?
5. Що таке роздільна здатність зорової труби?
6. Як вимірюють фокусну віддаль об`єктива і окуляра?
7. Як вимірюють діаметр вхідного отвору об`єктива і вихідної зіниці зорової труби?
Лабораторна робота № 3.
Вивчення конструкції і основних метрологічних характеристик відлікової системи теодоліта 3Т2КП. Мета роботи: Вивчити конструктивні особливості відлікової системи теодоліта 3Т2КП і визначити основні метрологічні характеристики двостороннього оптичного мікрометра.
3.1.Основні відомості.
Для підвищення точності відлічування в теодоліті 3Т2КП застосовується двосторонній оптичний мікрометр, який дозволяє уникати вплив ексцентриситету алідади і круга на точність вимірювання.
На схемі двостороннього оптичного мікрометра з рухомими оптичними клинами (рис.3.1): 1 – круг, 2 – зображення круга, 3 - об`єктив, 4, 5 – нерухомі клини, 6, 7 – рухомі клини, 8 – шкала оптичного мікрометра;
Рис.3.1. Схема дії двостороннього оптичного мікрометра з рухомими оптичними клинами.
а – клини прилягають одні до одних, шкала мікрометра має нульовий відлік, штрихи круга і його зображення не збігаються; б - рухомі клини відсунуті, шкала мікрометра має відлік, внаслідок пересування клинів штрихи круга і зображення його суміщені.
Нижня пара клинів 4 і 5 нерухома. Вони будують зображення діаметрально протилежних ділянок шкали круга точно посередині поля зору відлікового пристрою.
Верхня пара клинів 6 і 7 відповідно рухома – скріплена із шкалою мікрометра 8. Її приводять у рух зубчаста пара і рухається вона разом із шкалою мікрометра.
У результаті плоско паралельного переміщення рухомої пари клинів є можливість сумістити діаметрально протилежні штрихи шкали круга, а за шкалою мікрометра відлічити необхідне для цього переміщення клинів.
На рис.3.1, а положення клинів відповідає нульовому відліку шкали мікрометра. Зображення штрихів  і В діаметрально протилежних ділянок круга у полі зору мікроскопа не збігаються.
і В діаметрально протилежних ділянок круга у полі зору мікроскопа не збігаються.
Під час обертання маховичка оптичного мікрометра, що є співвісним зі зубчастим коліщатком, зубчаста рейка, а разом з нею шкала мікрометра і пара рухомих клинів рухаються, у результаті чого зображення штрихів діаметрально протилежних ділянок шкали круга і В суміщаються (рис. 3.1, б).
За індексом j відлічують шкалу мікрометра. Відлік мікрометра відповідає величині переміщення штрихів круга для суміщення їх у кутовій мірі.
На рис 3.2 і 3.3 подано принципову оптичну схему двостороннього оптичного мікрометра теодоліта з оптичними клинами. Рис.3.2 ілюструє хід променів через обидва круги теодоліта.
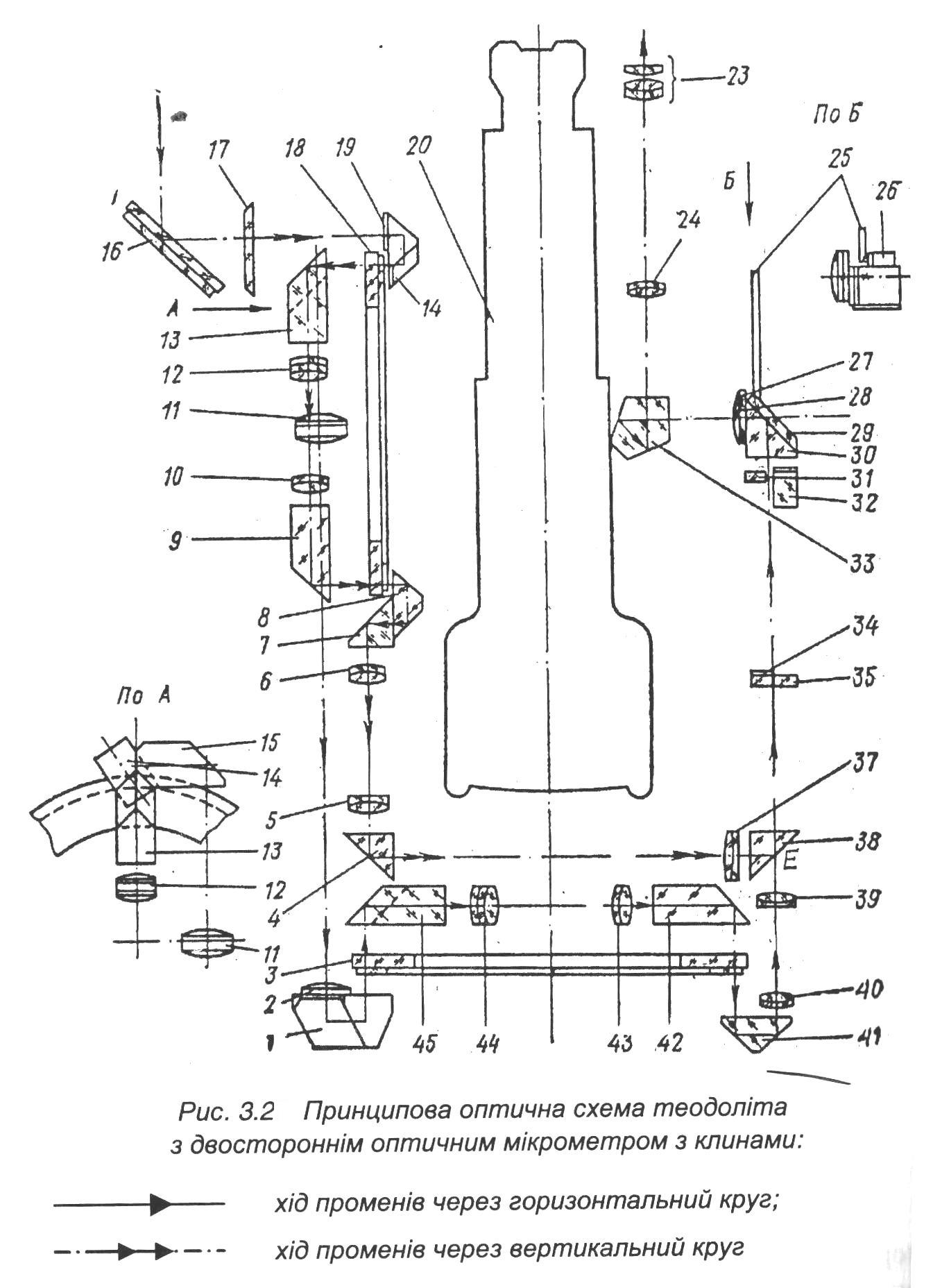 На рис.3.2 позначено:
На рис.3.2 позначено:
1 і 15 – призми освітлювальної системи горизонтального круга; 2 і 11 – лінзи тієї самої системи.; 3 – горизонтальний круг; 4, 7, 8 і 38 – призми системи вертикального круга; 5, 6 і 37 – лінзи об`єктива мікроскопа системи вертикального круга; 9 і 13 – призми системи передач зображення діаметрально протилежної ділянки вертикального круга; 10 і 12 – лінзи об`єктива тієї самий системи; 14 – призми освітлювальної системи вертикального круга; 16 – зовнішнє поворотне дзеркало; 17 - захисне скло; 18 - вертикальний круг; 19 – світло – фільтр освітлювальної системи вертикального круга; 20 – зорова труба; 23 – окуляр відлікового мікроскопа; 24- об`єктив відлікового мікроскопа; 25–шкала мікрометра; 26 – призма підсвічування шкали мікрометра; 27 – лінза колектив; 28– діафрагма поля зору мікроскопу; 29- клинова платівка розподільного блока; 30 – призма розподільного блока; 31 і 32 – рухомі клини мікрометра; 33 – пента - призма відлікового мікроскопа; 34 і 35 – нерухомі клини мікрометра; 39 і 40 – лінзи об`єктива мікроскопа системи горизонтального круга; 41 – призма тієї самий системи; 42 і 45 – призми системи передавання зображення діаметрально протилежної ділянки горизонтального круга; 43 і 44 – лінзи об`єктива тієї самий системи.
Промені йдуть через діаметрально протилежні частини шкал горизонтального і вертикального круга різними шляхами, але мають спільну ділянку від точки Е (призма 38) до окуляра 23 відлікового мікроскопа.
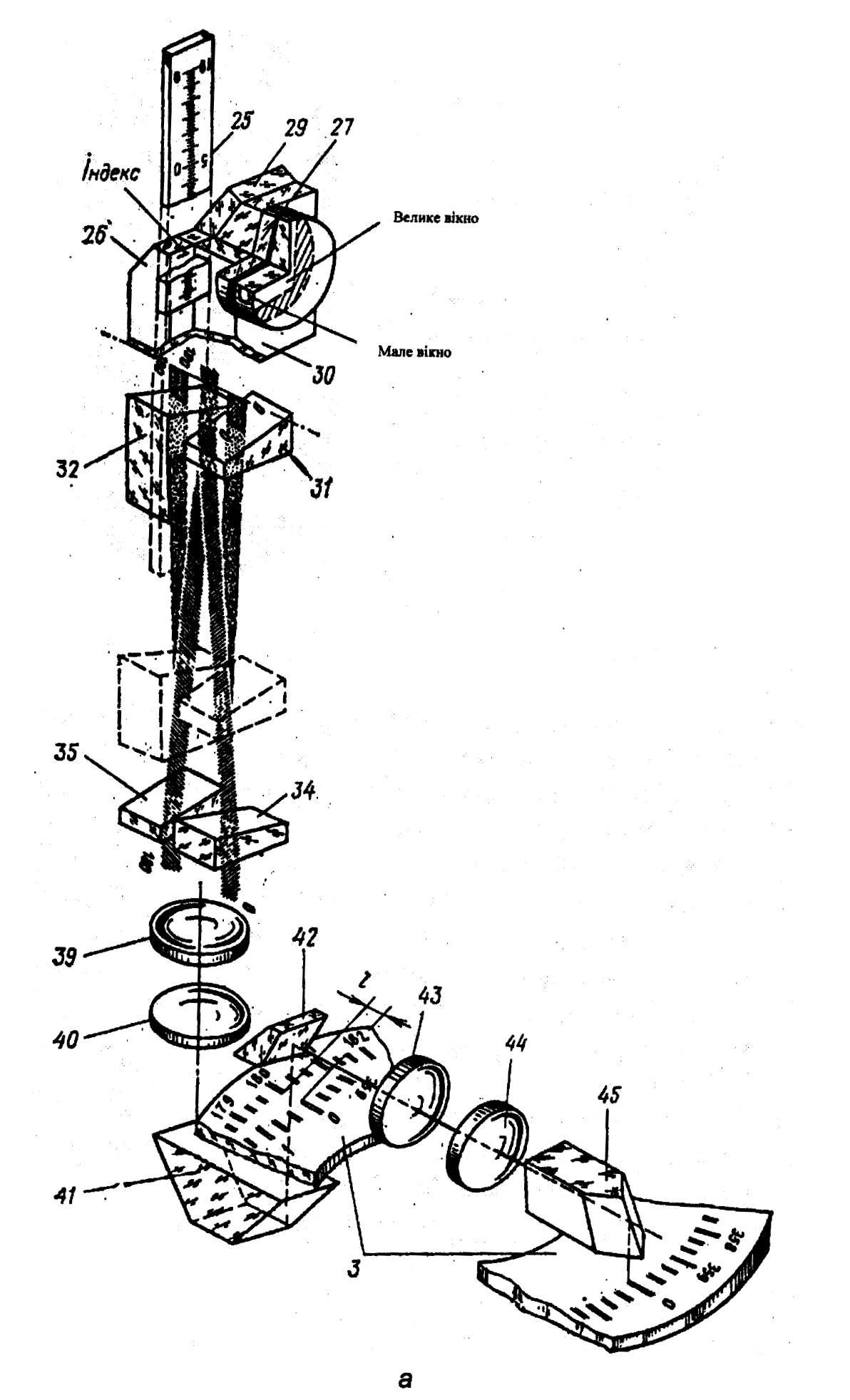 Рис. 3.3, а. Оптична схема мікрометра з клинами.
Рис. 3.3, а. Оптична схема мікрометра з клинами.
Рис. 3.3, а – хід променів в оптичної системі мікрометра з рухомими клинами. Позначення: 3 – горизонтальний круг; 25 – шкала мікрометра; 26 – призма підсвічування шкали мікрометра; 27 – лінза колектив; 29, 30– клинова платівка та призма розподільного блока; 31, 32 – рухомі клини мікрометра; 34, 35 – нерухомі клини мікрометра; 39, 40 – лінзи об’єктива мікроскопа системи горизонтального круга; 41 – призма тієї же системи; 42, 45 – призми системи передавання зображення діаметрально протилежної ділянки горизонтального круга; 43, 44 – лінзи об’єктива тієї же системи.
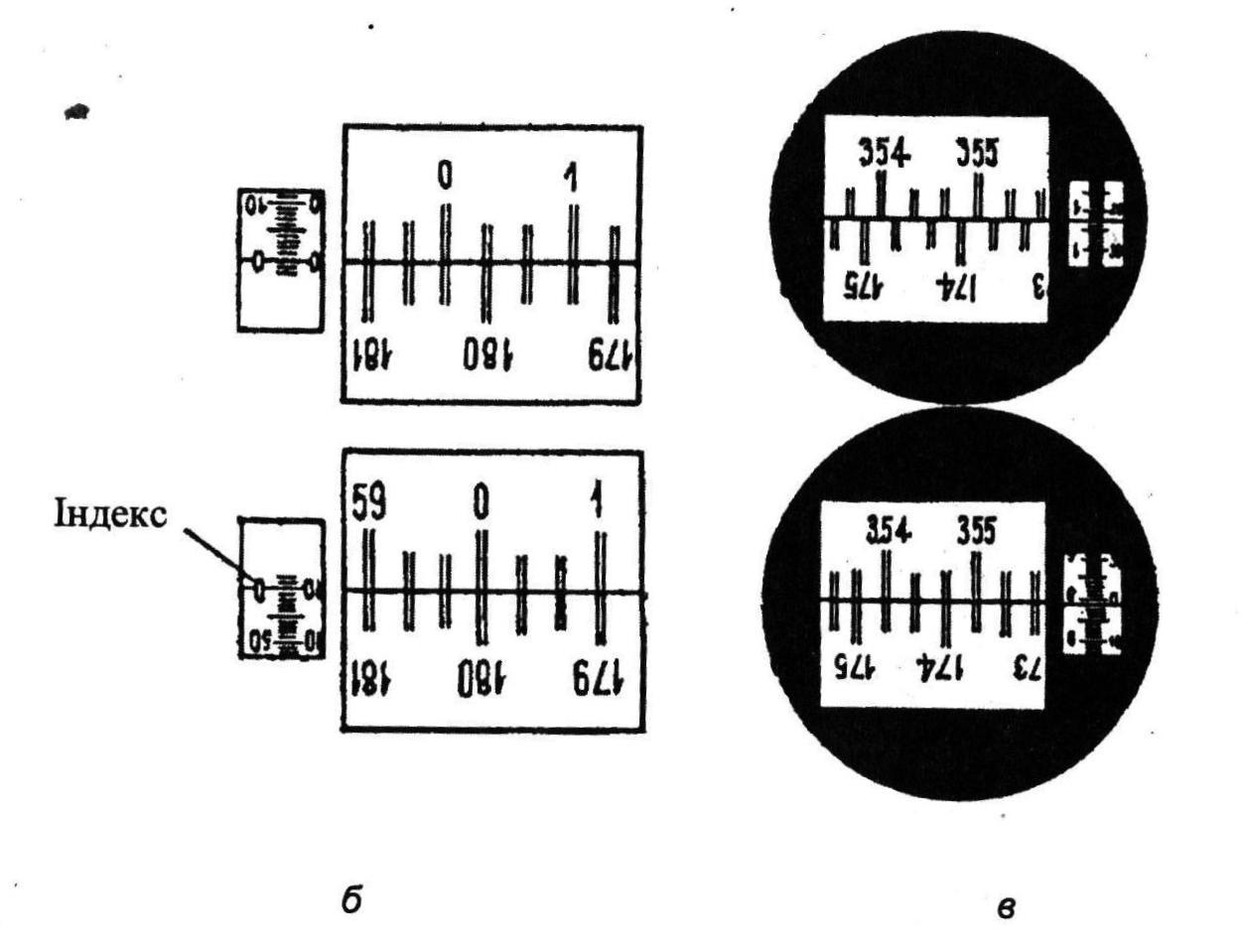
Рис. 3.3, б, в. б – принцип суміщення діаметрально протилежних штрихів шкали круга, в – приклад відлічування за діаметрально протилежними штрихами (λ = 20′; μ = 1″), відлік 354°26′ 01″.
Рис.3.4. Принципова схема оптичного мікрометра з клинами: а – клини прилягають один до одного, б – рухомий клин відсунуто від нерухомого, 1 – нерухомий клин, 2 – рухомий клин, 3 – шкала.
Щоб відлічити кожен із кругів, треба поставити рукоятку перемикача кругів у потрібне положення (горизонтальне чи вертикальне). Рукоятка перемикача зв`язана з призмою 38, яка в одному своєму положенню (вертикальний круг) перекриває промені від горизонтального круга, а відбиває та спрямовує до мікроскопа промені, що пройшли через вертикальний круг, який і відлічують. Після проведення перемикача у положення “ горизонтальний круг” призма 38 переміщується, звільняючи шлях променям, що пройшли горизонтальний круг, який відлічують. На рис. 3.3, а показано, як оптична система, що складається з деталей 42, 43, 44 і 45, будує навпроти штриха 180° горизонтального круга зображення діаметрально протилежного йому штриха 0°. Надалі промені, що несуть інформацію про штрихи, подаються до клинів. На верхній частині рис.3.3, б діаметрально протилежні штрихи 0° і 180° розміщені один від одного на віддалі рівно одній поділки шкали. Відлік шкали мікрометра 0′, 00″. На нижній частині рис. 3.3, б діаметрально протилежні штрихи 0° і 180° ідеально суміщені. Відлік шкали мікрометра 10′ 00″, 0. Для того, щоб штрихам у результаті сумісного руху подолати поділку шкали (λ = 20′) кожний з них має пройти шлях λ /2, тобто 10′ (повністю шкалу мікрометра). Отже, поділки (проміжки) між діаметрально протилежними штрихами необхідно оцінювати під час відлічування, як λ /2. На верхній частині рис.3.3, а штрихи діаметрально протилежних ділянок круга одні відносно одних розташовані безладно. Щоб відлічити, повертають маховичок оптичного мікрометра і суміщають штрихи, як на нижній частині рис.3.3, в. У відлік записують номери штрихів, цифри яких головками догори. Такий молодший штрих – 354, а діаметрально протилежний йому – 174. Між діаметрально протилежними штрихами є дві поділки (проміжки). Ціна поділки λ = 20′ (градусна поділка поділена на три поділки), а ціна проміжку між 354 і 174 дорівнює λ /2 = 10′. Тому відлік шкали круга 354° + 2× 10 = 354°20′. Відлік шкали мікрометра 06′ 01″ (ціна поділки його шкали μ =1″). На шкалі мікрометра ліворуч підписані одиниці хвилин, праворуч – десятки секунд у хвилині. Відлічувати шкалу мікрометра можна з точністю до десятої частки його поділки, тобто до 0.1″. Відлік на рис. 3.3, в (нижня частина) 354°26′ 01″. Так само, як у наведеному прикладі, відлічують у теодолітів типу Т2 і Theo 010.
В оптичних теодолітах сучасних конструкцій у полі зору мікроскопа двостороннього оптичного мікрометра суміщають не підписані діаметрально протилежні штрихи. На рис. 3.5 наведено приклад відлічування в теодоліті 3Т2КП.
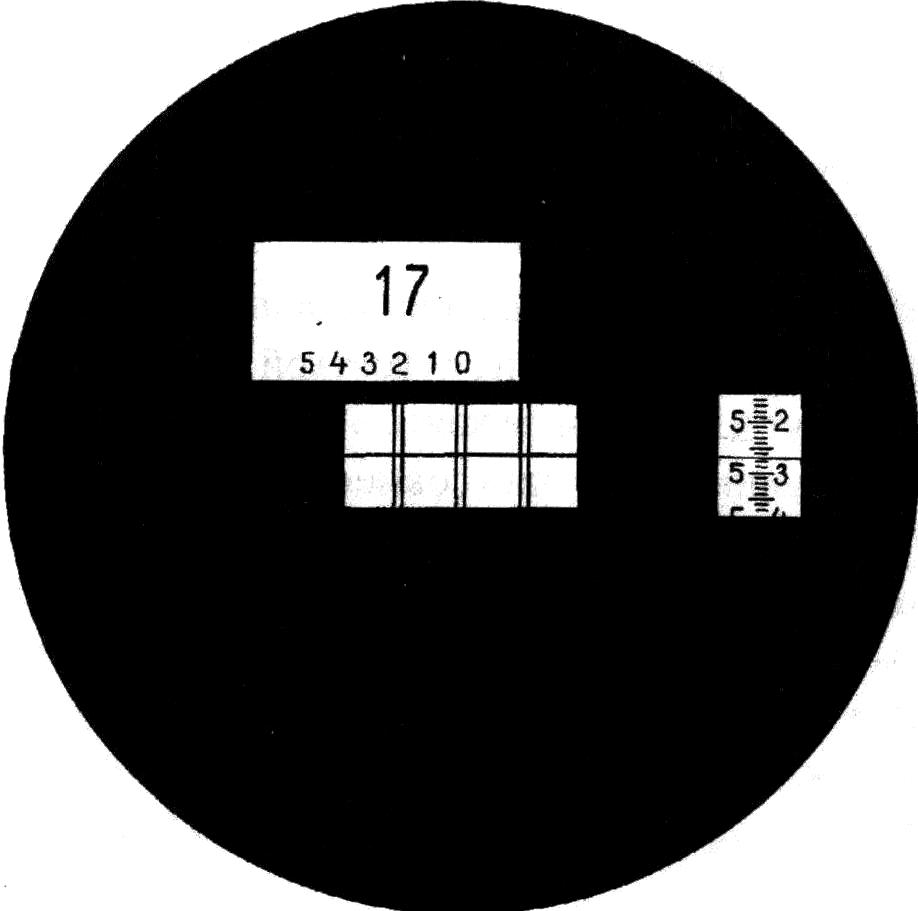
Рис. 3.5. Поле зору мікроскопа теодоліта 3Т2КП.
Щоб відлічити, суміщають штрихи у центральному віконечку (горизонтальний круг має подвійні штрихи, а вертикальний круг може мати поодинокі). У верхньому віконечку велика цифра 17 – кількість градусів, під нею менші цифри (0, 1, 2.3, 4.5) – десятки хвилин. На шкалі мікрометра, як звичайно, підписані ліворуч – одиниці хвилин (1…, 10), праворуч десятки секунд у хвилині (λ = 20′; μ =1″). Десятки хвилин, які відлічують, під двозначними цифрами градусів (10, …..99), як на рис.3.4, розташовується по середині між цифрами градусів; під самою цифрою для одноцифрових значень градусів (0, ……9); а коли відлік градусів містить три цифри (100, …….359)– під середньою цифрою. Відлік на рис. 3.4 – 17°25′ 27″.
3.2.Дослідження відлікових пристроїв.
Геодезичні прилади перевіряють і досліджують згідно ДЕСТ а і інструкції. Дослідження містять метрологічні випробування окремих вузлів приладів для установлення впливу особливостей їх роботи на точність вимірювань. Стосовно відлікових пристроїв, суттєва увага приділяється випробуванням оптичних мікрометрів та шкалових мікроскопів теодолітів.
3.2.1.Визначення похибок суміщення двосторонніх оптичних мікрометрів.
В теодолітах з двостороннім оптичним мікрометром щоб відлічити під час фокусування кожного з відліків треба сумістити кінці зображень штрихів круга. Від точності суміщення штрихів залежить точність відлічування шкали мікрометра. Похибки суміщення виникають внаслідок того, що суміщати штрихи однаково і абсолютно точно об`єктивно неможливо. Крім того, похибки суміщень залежать від особистих похибок спостерігача, позаяк суміщення штрихів фіксують окомірно. Випробування виконують способом подвійних вимірювань на різних установленнях круга, зокрема для горизонтального круга це 24 установлення.
Горизонтальний круг обертають рукояткою, встановлюючи відліки 0°, 15°, 30° тощо, тобто через 15° і попередньо суміщають штрихи згаданою рукояткою.
На кожному установленні круга після попереднього суміщення штрихи двічі одноманітно суміщають маховичком оптичного мікрометра за напрямом руху годинникової стрілки тільки значення секунд у хвилинному інтервалі.
Після визначення різниць – d відліку двох суміщень обчислюють середню квадратичну похибку одного суміщення згідно із залежністю
m сум = ±  , (3.1)
, (3.1)
де  – кількість установлень круга. Різниця
– кількість установлень круга. Різниця  - може істотно залежить від систематичної складової похибки.
- може істотно залежить від систематичної складової похибки.
Якщо значення  ср < 0, 3″, mсум визначають згідно із формулою (3.1), а якщо
ср < 0, 3″, mсум визначають згідно із формулою (3.1), а якщо  ср > 0, 3″, застосовують залежність
ср > 0, 3″, застосовують залежність
m сум = ±  і
і 
 . (3.2)
. (3.2)
Приклад визначення похибок суміщення штрихів горизонтального круга теодоліта 3Т2КП № 0117 (табл..3.1).
Таблиця 3.1. Результати визначення похибок суміщення штрихів.
| Установлення (град) | Від ліки суміщення мікрометра |  = 1-2 = 1-2
| Установлення, (град) | Від ліки суміщення мікрометра | = 1-2
| ||||||||||||||||||
| 0° | 15, 3 | 15, 8 | -0, 5″ | 180° | 26, 6 | 26, 8 | -0, 2″ | ||||||||||||||||
| 26, 1 | 25, 8 | +0, 3 | 37, 6 | 37, 4 | +0, 2 | ||||||||||||||||||
| 32, 9 | 33, 2 | -0, 3 | 8, 2 | 7, 6 | +0, 6 | ||||||||||||||||||
| 38, 2 | 38, 6 | -0, 4 | 13, 3 | 13, 7 | -0, 4 | ||||||||||||||||||
| 23, 8 | 23, 2 | +0, 6 | 53, 4 | 53, 0 | +0, 4 | ||||||||||||||||||
| 5, 2 | 5, 3 | -0, 1 | 24, 8 | 25, 2 | -0, 4 | ||||||||||||||||||
| 43, 8 | 43, 2 | +0, 6 | 19, 2 | 19, 4 | -0, 2 | ||||||||||||||||||
| 49, 8 | 50, 0 | -0, 2 | 27, 4 | 27, 6 | -0, 2 | ||||||||||||||||||
| 11, 8 | 11, 7 | +0, 1 | 23, 6 | 23, 8 | -0, 2 | ||||||||||||||||||
| 21, 3 | 21, 5 | -0, 2 | 33, 0 | 32, 6 | +0, 4 | ||||||||||||||||||
| 26, 9 | 26, 8 | +0, 1 | 21, 8 | 21, 4 | +0, 4 | ||||||||||||||||||
| 42, 6 | 42, 9 | -0, 3 | 45, 8 | 45, 4 | +0, 4 | ||||||||||||||||||
Сума -0, 3 Сума +0, 8 Σ d = -0, 3+0, 8=0, 5″,  = =  × 0, 5=0, 021, × 0, 5=0, 021,  =3, 03, =3, 03,  = 24× = 24×  =0, 011< 0, 3, m сум =± =0, 011< 0, 3, m сум =±  = =  =±0, 25″, М = m сум / =±0, 25″, М = m сум /  = 0, 25 / = 0, 25 /  = 0, 25 / 4, 9 = 0, 051″.
Під час випробування вертикального круга його переустановлюють через 1° в інтервалі 82 - 97°. Середня квадратична похибка суміщення штрихів теодоліта 3Т2КП не повинна перевищувати для горизонтального круга 0, 5 ″, а вертикального круга – 0, 6 ″. Так як = 0, 25 / 4, 9 = 0, 051″.
Під час випробування вертикального круга його переустановлюють через 1° в інтервалі 82 - 97°. Середня квадратична похибка суміщення штрихів теодоліта 3Т2КП не повинна перевищувати для горизонтального круга 0, 5 ″, а вертикального круга – 0, 6 ″. Так як  = 24× = 24×  =0, 011 < 0, 3, середню квадратичну похибку суміщення обчислюють за формулою (3.1), яка склала m сум = ±0, 25″, що не перевищує її допустимого значення 0, 5 ″.
3.2.2.Визначення Рена оптичного мікрометра.
Під Реном відлікового пристрою розуміють невідповідність шкали, що зображає оптична система у фокусній площині мікроскопа, зображенню найменшої поділки круга.
У двосторонніх оптичних мікрометрах під час обертання маховичка мікрометра зображення штрихів круга сумісно і одночасно рухаються назустріч один одному.
Щоб подолати одну поділку λ шкали круга, кожному із штрихів доводиться пройти шлях λ /2, для чого треба витратити шкалу мікрометра повністю.
Позаяк пучки променів від діаметрально протилежних ділянок круга досягають об`єктива мікроскопа різними оптичними шляхами, видима величина однієї поділки верхнього зображення круга може не дорівнювати видимій величині однієї поділки нижнього зображення. =0, 011 < 0, 3, середню квадратичну похибку суміщення обчислюють за формулою (3.1), яка склала m сум = ±0, 25″, що не перевищує її допустимого значення 0, 5 ″.
3.2.2.Визначення Рена оптичного мікрометра.
Під Реном відлікового пристрою розуміють невідповідність шкали, що зображає оптична система у фокусній площині мікроскопа, зображенню найменшої поділки круга.
У двосторонніх оптичних мікрометрах під час обертання маховичка мікрометра зображення штрихів круга сумісно і одночасно рухаються назустріч один одному.
Щоб подолати одну поділку λ шкали круга, кожному із штрихів доводиться пройти шлях λ /2, для чого треба витратити шкалу мікрометра повністю.
Позаяк пучки променів від діаметрально протилежних ділянок круга досягають об`єктива мікроскопа різними оптичними шляхами, видима величина однієї поділки верхнього зображення круга може не дорівнювати видимій величині однієї поділки нижнього зображення. 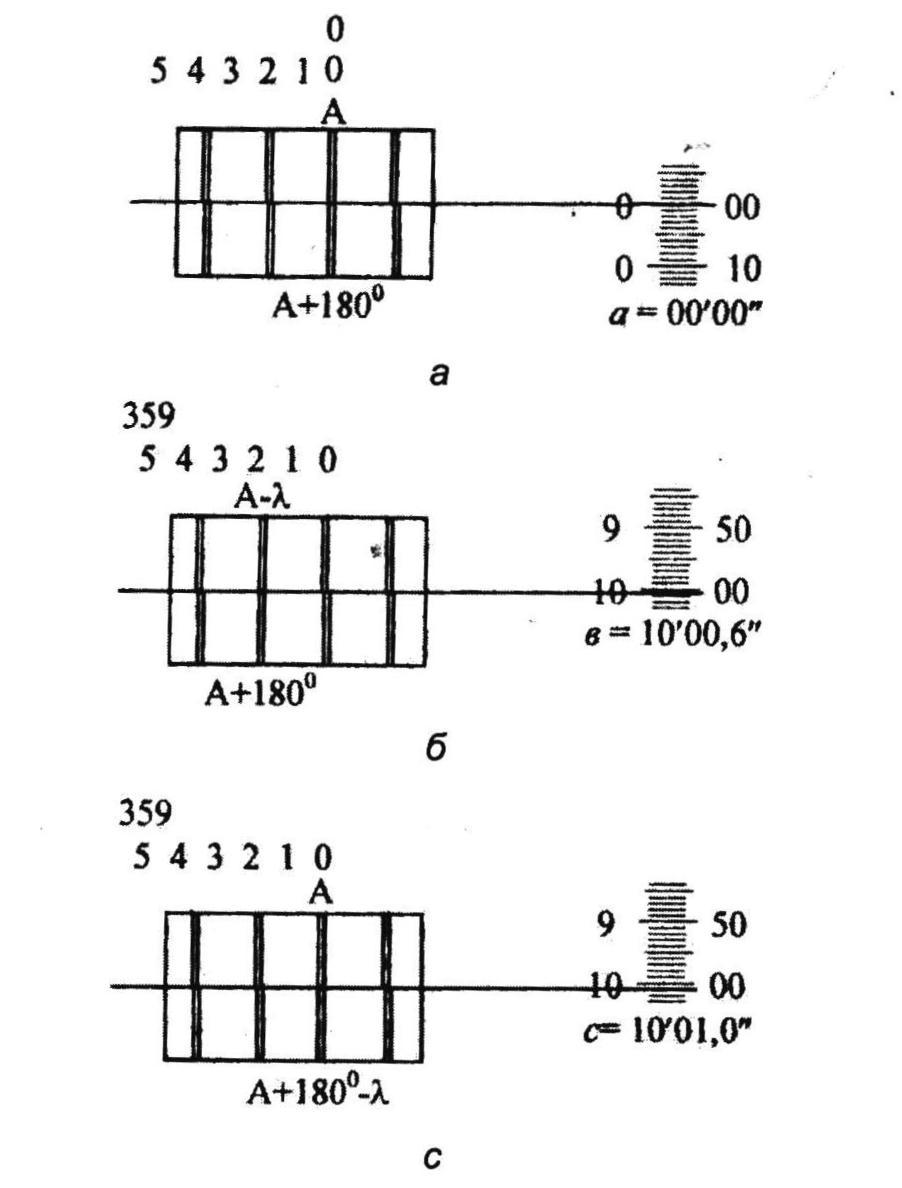 Рис.3.6. Визначення Рену теодоліта 3Т2КП.
Наприклад, для теодолітів 3Т2КП (рис.3.6, а) у полі зору оптичного мікрометра ретельно суміщені штрихи А і А+180°. Відлік шкали мікрометра Рис.3.6. Визначення Рену теодоліта 3Т2КП.
Наприклад, для теодолітів 3Т2КП (рис.3.6, а) у полі зору оптичного мікрометра ретельно суміщені штрихи А і А+180°. Відлік шкали мікрометра  =0′ 00″, 0 (під час випробування зазвичай виконують два суміщення). Обертаючі маховичок оптичного мікрометра, суміщають штрихи А+180° (180) з і штрихом А - λ (359° 40′), як вказано на рис.3.6, б і відлічують шкалу мікрометра в = 10′ 00″, 6 (звичайно виконують два суміщення).
Однак після цього може виявитися, що штрихи А(0°) і А+180° - λ (179° 40′) суміщені неточно. Після суміщення штрихів А(0°) і А+180° - λ (179° 40′) відлік шкали становить с = 10′ 01″, 0 (звичайно два суміщення) (рис.3.6, в).
Отже, Реном двостороннього оптичного мікрометра називають різницю між номінальним значенням ціни пів поділки шкали круга та її величиною, виміряною шкалою оптичного мікрометра. Рен залежить від якості юстування оптичної системи відлічування і для різних ділянок круга може бути різним внаслідок впливу ексцентриситету алідади і круга та похибок нанесення поділок круга. У зв`язку з цим вимірювання пів поділок верхнього та нижнього зображень виконують на різних ділянках круга, наприклад через 45° 20 ′ послідовно 0° 00 ′, 45° 20 ′, 90° 40 ′ і т.д.
Приклад вимірювань і визначення Рену горизонтального круга теодоліта 3Т2КП наведено в табл. 3.2. Програма визначення Рену передбачає виконання прямого і зворотного ходів (у зворотному ході установлення складають 337° 40′; 292° 20′; 297° 00′ і т. д.). Якщо під час суміщення штрихів індекс оптичного мікрометра установлюється вище нульового штриха шкали, відліку надають знак “ мінус ”, якщо нижче – знак “ плюс ”. А коли індекс установився нижче від штриха шкали 10′ 00″ (більше 10′ 00″), відлік має знак “ плюс ”, вище -“ мінус ” (рис. 3.6). Рен верхніх зображень штрихів визначають згідно із залежністю
rв = (a - b) μ + =0′ 00″, 0 (під час випробування зазвичай виконують два суміщення). Обертаючі маховичок оптичного мікрометра, суміщають штрихи А+180° (180) з і штрихом А - λ (359° 40′), як вказано на рис.3.6, б і відлічують шкалу мікрометра в = 10′ 00″, 6 (звичайно виконують два суміщення).
Однак після цього може виявитися, що штрихи А(0°) і А+180° - λ (179° 40′) суміщені неточно. Після суміщення штрихів А(0°) і А+180° - λ (179° 40′) відлік шкали становить с = 10′ 01″, 0 (звичайно два суміщення) (рис.3.6, в).
Отже, Реном двостороннього оптичного мікрометра називають різницю між номінальним значенням ціни пів поділки шкали круга та її величиною, виміряною шкалою оптичного мікрометра. Рен залежить від якості юстування оптичної системи відлічування і для різних ділянок круга може бути різним внаслідок впливу ексцентриситету алідади і круга та похибок нанесення поділок круга. У зв`язку з цим вимірювання пів поділок верхнього та нижнього зображень виконують на різних ділянках круга, наприклад через 45° 20 ′ послідовно 0° 00 ′, 45° 20 ′, 90° 40 ′ і т.д.
Приклад вимірювань і визначення Рену горизонтального круга теодоліта 3Т2КП наведено в табл. 3.2. Програма визначення Рену передбачає виконання прямого і зворотного ходів (у зворотному ході установлення складають 337° 40′; 292° 20′; 297° 00′ і т. д.). Якщо під час суміщення штрихів індекс оптичного мікрометра установлюється вище нульового штриха шкали, відліку надають знак “ мінус ”, якщо нижче – знак “ плюс ”. А коли індекс установився нижче від штриха шкали 10′ 00″ (більше 10′ 00″), відлік має знак “ плюс ”, вище -“ мінус ” (рис. 3.6). Рен верхніх зображень штрихів визначають згідно із залежністю
rв = (a - b) μ +  , (3.3) а Рен нижчих зображень - із залежністю
rн = (a - с) μ + , (3.4) де μ = 1″ - ціна поділки шкали мікрометра. Значення rв і rн визначають за середніми значеннями Рену для прямого rв′ і rн ′ та зворотного rв″ і rн ″ ходів
rв = , (3.3) а Рен нижчих зображень - із залежністю
rн = (a - с) μ + , (3.4) де μ = 1″ - ціна поділки шкали мікрометра. Значення rв і rн визначають за середніми значеннями Рену для прямого rв′ і rн ′ та зворотного rв″ і rн ″ ходів
rв =  (rв′ + rв″); r н = (rн ′ + rн ″). (3.5) Загальний середній Рен r = (rв + r н) (3.6) і різниця ∆ r = rв – rн. (3.7)
Значення rв, rн, r і ∆ r горизонтального круга теодоліта 3Т2КП не повинні перевищувати 1, 5″ кожний, а вертикального круга - 2, 5 ″.
Для визначення Рену вертикального кругу вимірювання виконують у секторі 10 - 120° через кожні 5°. Для зручності введення поправки складають таблицю або графік поправок. Проте варто зазначити, що введення поправки за Рен є трудомістким навіть за наявністю таблиці або графіка. Якщо значення rв, rн, r і ∆ r перевищують допустимі, їх виправляють, або вводять у кожній відлік шкали мікрометра поправку за Рен δ r, яку обчислюють за формулою
δ r = (rв′ + rв″); r н = (rн ′ + rн ″). (3.5) Загальний середній Рен r = (rв + r н) (3.6) і різниця ∆ r = rв – rн. (3.7)
Значення rв, rн, r і ∆ r горизонтального круга теодоліта 3Т2КП не повинні перевищувати 1, 5″ кожний, а вертикального круга - 2, 5 ″.
Для визначення Рену вертикального кругу вимірювання виконують у секторі 10 - 120° через кожні 5°. Для зручності введення поправки складають таблицю або графік поправок. Проте варто зазначити, що введення поправки за Рен є трудомістким навіть за наявністю таблиці або графіка. Якщо значення rв, rн, r і ∆ r перевищують допустимі, їх виправляють, або вводять у кожній відлік шкали мікрометра поправку за Рен δ r, яку обчислюють за формулою
δ r =  k, (3.8) де k – відлік хвилин шкали мікрометра; 10′ - кутова величина шкали мікрометра. Вважають, що вводити поправку за Рен доцільно при невеликих (до 3 – 5″) значеннях r і ∆ r. Тому Рен необхідно усунути через юстування, яке робиться у спеціальній майстерні або геодезистом високої кваліфікації у разі необхідності. Приклад визначення Рену – табл..3.2. На кожному установленні виконується два введення штриха у бісектор.
3. 2.3 Визначення Рену мікроскопа зі шкалою.
В теодолітах, що мають мікроскопи зі шкалою, Рен – це невідповідність зображення поділки шкали круга довжині шкали мікроскопа. До цих теодолітів відносять типи Т5 – 3Т5КП; 2Т5КП; 2Т5тощо. Рен визначають способом порівнянняподілки шкали круга безпосередньо з довжиною шкали мікроскопа. Таблиця 3.3, а
Визначення Рену мікроскопа зі шкалою. k, (3.8) де k – відлік хвилин шкали мікрометра; 10′ - кутова величина шкали мікрометра. Вважають, що вводити поправку за Рен доцільно при невеликих (до 3 – 5″) значеннях r і ∆ r. Тому Рен необхідно усунути через юстування, яке робиться у спеціальній майстерні або геодезистом високої кваліфікації у разі необхідності. Приклад визначення Рену – табл..3.2. На кожному установленні виконується два введення штриха у бісектор.
3. 2.3 Визначення Рену мікроскопа зі шкалою.
В теодолітах, що мають мікроскопи зі шкалою, Рен – це невідповідність зображення поділки шкали круга довжині шкали мікроскопа. До цих теодолітів відносять типи Т5 – 3Т5КП; 2Т5КП; 2Т5тощо. Рен визначають способом порівнянняподілки шкали круга безпосередньо з довжиною шкали мікроскопа. Таблиця 3.3, а
Визначення Рену мікроскопа зі шкалою.
| |||||||||||||||||||||||
| №п | відлік | а =0′ + | в=10′ + | с=10′ + | rн= а-в+ 10′ | rв= а-с+ 10′ | №п | відлік | а =0′ + | в 10′ + | с=10′ + | rн= а-в+ 10′ | rв= а-с+ 10′ | ||||||||||
| 0° 00′ | -1, 8″ -2, 5 | 0, 0 0, 0 | 0, 0 0, 0″ | -1, 8″ -2, 5 | -1, 8″ -2, 5 | 22° 20′ | -2, 5″ -2, 1 | 1, 0 -0, 2″ | 0″ 0 0″ 0 | -3, 5 -1, 9″ | -2, 5 -2, 1″ | ||||||||||||
| 45° 20′ | -2, 0 -3, 0 | 0 0 | 0 0 | -2, 0 -3, 0 | -2, 0 -3, 0 | 67° 40′ | -2, 8″ -3, 0 | -0, 2″ 0 | -1, 5 -1, 5 | -2, 6 -3, 0 | -1, 3 -0, 5 | ||||||||||||
| 90° 40′ | -2, 6 -3, 0 | 0 0 | -0, 4-1, 1 | -2, 6 -3, 0 | -2, 2 -1, 9 | 112° 00′ | -2, 1 -0, 1 | -0, 5 1, 0 | -0, 5 1, 0 | -2, 6 -0, 9 | 2, 6 -0, 9 | ||||||||||||
| 135° 00 | -2, 5 -2, 0 | -0, 2 0 | -2, 2 -1, 6 | -2, 3 -2, 0 | -0, 3 -0, 4 | 157° 20′ | -1, 6 0 | 1, 0 1, 0 | 0 0, 5 | -2, 6 -1, 0 | -1, 6 -0, 5 | ||||||||||||
| 180 20 | -2, 0 0 | 0 0, 5 | 0, 5 0 | -2, 0 -0, 5 | -2, 5 0 | 202° 40′ | -1, 9 -1, 5 | 1, 0 1, 0 | 0, 5 0, 5 | -2, 9 -2, 5 | -2, 4 -2, 0 | ||||||||||||
| 225° 40 | -2, 0 -2, 9 | 0 0 | -2, 1 -0, 9 | -2, 0 -2, 9 | -0, 1 -2, 0 | 248° 00′ | -1, 5 -2, 0 | -1, 0 0 | 2, 5 -2, 2 | -0, 5 -2, 0 | 0 0, 2 | ||||||||||||
| 270° 00 | -2, 5 -2, 0 | 0, 5 1, 0 | -0, 2 0 | -3, 0 0 | -3, 0 -2, 0 | 292° 20′ | -3, 0 -1, 5 | 1, 0 1, 0 | 1, 0 1, 0 | -4, 0 -2, 5 | -4, 0 -2, 5 | ||||||||||||
| 315° 20 | -2, 0 -1, 0 | 0 0 | -2, 0 -1, 5 | -2, 0 -1, 0 | 0 0, 5 | 337° 40′ | -1, 0 -1, 5 | 0, 5 0, 5 | -0, 5 -0, 9 | -1, 5 -1, 5 | -0, 5 -0, 6 | ||||||||||||