Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Практические рекомендации по работе в режимах В и А, М.
|
|
Режим В (2D). Из всех возможных способов получения диагностической информации о биологических структурах с помощью ультразвука наибольшее распространение имеет способ получения двухмерного изображения. При этом применяется периодическое излучение УЗ импульсов во внутренние структуры организма и прием сигналов, отраженных акустическими неоднородностями структур.
Совокупность принятых сигналов, называемых эхо-сигналами, позволяет построить акустическое изображение биологических тканей на специальном индикаторе (мониторе). Таким образом, информация получается прежде всего за счет отражения УЗ колебаний и образования эхо-сигналов - вторичных сигналов, распространяющихся в сторону, обратную направлению излучения. Величина (уровень) эхо-сигналов определяется отражающими свойствами границ раздела структур, что прежде всего связано с различием акустических характеристик структур. Кроме того, на характеристики акустического изображения влияют такие физические эффекты, как:
•преломление - изменение направления распространения УЗ сигналов при переходе из одной среды в другую;
•рассеяние - многократное переотражение УЗ сигналов на мелких неоднородностях;
• поглощение УЗ сигналов вследствие вязкости среды.
Датчик (зонд) обеспечивает излучение УЗ сигналов в определенных направлениях и прием отраженных эхо-сигналов с этих же направлений. Изменяя направление излучения-приема, датчик осуществляет сканирование. Для того чтобы избежать потерь мощности УЗ сигналов при прохождении через воздух, в котором затухание сигналов резко возрастает, между поверхностью обследуемого объекта (тела пациента) и рабочей поверхностью датчика наносится слой специального геля, хорошо проводящего ультразвук. Излучение и прием УЗ сигналов в процессе сканирования осуществляется периодически, при этом каждый раз в ограниченной области пространства, которая называется УЗ лучом.
Сразу же по окончании излучения зондирующего импульса датчик переходит из режима передачи в режим приема сигналов. При этом можно говорить о приемном луче датчика, определяющем пространственную область, в которой датчик имеет максимальную чувствительность на прием. Луч на излучение (передачу) и приемный луч совпадают по направлению и близки по виду, но в общем случае не обязательно одинаковы по форме, что определенным образом влияет на акустическое изображение.
Если на пути зондирующего импульса, который продолжает свое путешествие в границах передающего луча, встречаются акустические неоднородности, часть мощности зондирующего импульса в виде эхо-сигналов отражается в различных направлениях, в том числе и в направлении на датчик. Учитывая то обстоятельство, что зондирующий импульс распространяется не только в пределах передающего луча, но и за его границами (хотя и существенно меньшего уровня), характеристики приемного луча чрезвычайно важны для получения качественного акустического изображения. Если приемный луч такой же ширины, как и передающий, это позволяет практически исключить прием эхо-сигналов из области за пределами общих границ лучей.
Эхо-сигналы от неоднородностей в пределах границ лучей при достаточном уровне отражения принимаются датчиком, преобразуются в электрические импульсы и после усиления в устройстве передачи-приема поступают в устройство преобразования, обработки и запоминания сигналов. На выходе этого устройства формируются сигналы в виде, позволяющем отображать их на телевизионном мониторе. Эхо-сигналы отображаются в виде яркостных отметок на невидимой линии, соответствующей оси УЗ луча. Информация в виде яркостных отметок вдоль осей называется акустическими строками. Яркость отметок на акустических строках соответствует амплитуде принятых эхо-сигналов.
 Оси всех лучей находятся в одной плоскости, которая называется плоскостью сканирования. Все эхо-сигналы, принятые и преобразованные прибором, отображаются на телевизионном мониторе на акустических строках, каждая из которых соответствует своему лучу. В результате образуется яркостное изображение, отсюда и название В-режим (от слова brightness - яркость). Другое обозначение для В-режима – 2D-режим (от слова two-dimensional - двухмерный).
Оси всех лучей находятся в одной плоскости, которая называется плоскостью сканирования. Все эхо-сигналы, принятые и преобразованные прибором, отображаются на телевизионном мониторе на акустических строках, каждая из которых соответствует своему лучу. В результате образуется яркостное изображение, отсюда и название В-режим (от слова brightness - яркость). Другое обозначение для В-режима – 2D-режим (от слова two-dimensional - двухмерный).
А-режим. Это самый простой вид отображаемой информации, для получения которой не требуется сканирование. Зондирование осуществляется при неизменном направлении акустического луча, и на экране монитора отображается А-эхограмма в виде амплитудных значений эхо-сигналов от неоднородностей, находящихся на различных глубинах в пределах луча.
А-эхограмма и соответствующий ей А-режим работы получили свое обозначение от слова amplitude (амплитуда). Амплитуды фиксируются на экране как функции времени t или глубины L, что позволяет информировать исследователя не только о глубине расположения структур, но и об уровне эхо-сигналов от них.
До недавнего времени А-режим использовался как дополнительный во всех приборах двухмерного изображения, представляя возможность анализа амплитудной информации в выбранном луче (акустической строке). Сейчас в большинстве двухмерных сканеров А-режим не используется. Одной из причин этого является то, что динамический диапазон яркостных сигналов в В-режиме на экране современного прибора вполне достаточен для анализа уровня эхо-сигналов, что достигается за счет большого числа градаций яркости (градаций «серой шкалы»).
А-режим применяется как самостоятельный в ряде специализированных диагностических приборов, используемых в офтальмологии, при транскраниальных исследованиях головного мозга, а также для обследования носовых и лобных пазух.
М-режим. М-режим работы используется для регистрации изменения пространственного положения подвижных структур во времени. Отсюда и название режима - от слова motion - движение. Наиболее часто режим используется для исследования движения структур сердца.
 В М-режиме зондирование периодически повторяется в одном и том же направлении акустического луча. При формировании М-эхограммы в каждом зондировании амплитудная информация об эхо-сигналах с различных глубин отображается в виде отметок различной яркости вдоль вертикальной линии на экране (акустической строки). Следующему зондированию соответствует своя линия, расположенная правее предыдущей, и в процессе перемещения столбца с каждым новым зондированием формируется двухмерная М-эхограмма. Положение яркостных отметок по вертикали пропорционально глубине отражающей структуры (например, сердечного клапана). На горизонтальной оси меняются моменты зондирования (t1, t2... и т.д.), каждому из которых соответствует новое положение подвижных структур. С помощью М-эхограммы можно количественно оценивать геометрическое смещение подвижных структур и измерять изменение взаимного положения различных структур (например, просвет в клапанах сердца, изменение размера желудочка и т.д.).
В М-режиме зондирование периодически повторяется в одном и том же направлении акустического луча. При формировании М-эхограммы в каждом зондировании амплитудная информация об эхо-сигналах с различных глубин отображается в виде отметок различной яркости вдоль вертикальной линии на экране (акустической строки). Следующему зондированию соответствует своя линия, расположенная правее предыдущей, и в процессе перемещения столбца с каждым новым зондированием формируется двухмерная М-эхограмма. Положение яркостных отметок по вертикали пропорционально глубине отражающей структуры (например, сердечного клапана). На горизонтальной оси меняются моменты зондирования (t1, t2... и т.д.), каждому из которых соответствует новое положение подвижных структур. С помощью М-эхограммы можно количественно оценивать геометрическое смещение подвижных структур и измерять изменение взаимного положения различных структур (например, просвет в клапанах сердца, изменение размера желудочка и т.д.).
М-режим широко используется в кардиологии, как правило вместе с В-режимом. В процессе сканирования в В-режиме исследователь выбирает необходимый ракурс наблюдения, потом с помощью курсорной линии на В-эхограмме выбирается направление зондирования (направление оси УЗ луча) для М-режима, после чего положение датчика фиксируется рукой и включается режим М.
Как правило, используются следующие режимы отображения М-эхограммы на экране прибора:
- М - режим отображения только М-эхограммы;
- В + М - режим одновременного отображения двухмерной В-эхограммы и М-эхограммы.
Одновременно с М-эхограммой могут отображаться синхронно с ней во времени допплеровский спектр кровотока в сосудах или сердце, а также электрокардиограмма по одному из отведений. Эти режимы отображения используются в эхокардиографах - специализированных ультразвуковых приборах для обследования сердца и сосудов. Временные характеристики получения М-эхограммы: Частота периодического зондирования составляет не менее 20 Гц. Длительность отображаемой М-эхограммы во времени - от 1 до 16 с (время развертки).
Ультразвуковые преобразователи. Одним из основных узлов любого ультразвукового (УЗ) диагностического прибора является ультразвуковой преобразователь (ultrasound transducer). Он входит в состав датчика, и от него в существенной мере зависит качество получаемой информации.
Функции преобразователя: • преобразует электрич еские сигналы в механические (ультразвуковые) колебания; • принимает ультразвуковые эхосигналы и преобразует эти сигналы в электрические для дальнейшего усиления и обработки; • обеспечивает формирование УЗ луча требуемой формы как в режиме излучения, так и в режиме приема; •выполняет сканирование, т.е. перемещение УЗ луча в обследуемой области с помощью специальных переключателей (коммутаторов) и управляющих сигналов.
Многообразие УЗ преобразователей велико, однако в большинство из них входят одни и те же компоненты.
Демпфер. Основное назначение демпфера соответствует его названию - это частичное смягчение (демпфирование) механических колебаний пьезоэлемента. Делается это для того, чтобы максимально расширить полосу ультразвуковых частот, излучаемых и принимаемых датчиком. Другая обязанность демпфера - поглощать излучение тыльной стороны пьезоэлемента.
Согласующие слои. Наносятся на рабочую поверхность пьезоэлемента поверх электрода. Служат для согласования акустических сопротивлений материала пьезоэлемента и биологических тканей. Хорошее согласование совершенно необходимо для того, чтобы обеспечить передачу с минимальными потерями акустических (ультразвуковых) сигналов от пьезоэлемента в биологическую среду и наоборот, а следовательно, повысить чувствительность датчика.
Акустическая линза. Изготовленная из материала со специально подобранными свойствами, акустическая линза фокусирует УЗ луч, т.е. обеспечивает минимальную ширину луча в определенном диапазоне глубин и, следовательно, улучшает разрешающую способность. Одновременно акустическая линза выполняет роль протектора - защитного слоя, предохраняющего пьезопреобразователь от повреждений в процессе работы.
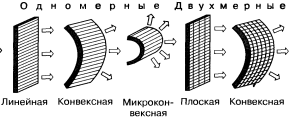
Типы датчиков Типы датчиков и их названия определяются использованием в них различных ультразвуковых преобразователей и способов сканирования. В зависимости от вида преобразователей можно выделить датчики с двухмерной решеткой, линейные, конвексные и секторные.
Способы сканирования:
1.Секторное (механическое) сканирование. В этом виде сканирования ось УЗ луча (акустическая строка) перемещается по углу так, что зона изображения имеет вид сектора.
2.Линейное электронное сканирование. При этом способе сканирования угловое направление УЗ луча не меняется. Зона обзора имеет вид прямоугольника
3.Конвексное (выпуклое) электронное сканирование. Этот метод отличается от линейного сканирования тем, что использует УЗ преобразователь в виде конвексной одномерной решетки.
4.Микроконвексное электронное сканирование. Этот вид сканирования принципиально аналогичен конвексному. Отличие состоит лишь в величине радиуса.
5.Векторное сканирование. Название «векторное сканирование» введено специалистами фирмы «Акусон» для обозначения усложненного варианта фазированного секторного электронного сканирования, который впервые был реализован в приборах фирмы. Векторное сканирование имеет целью уменьшить недостаток фазированного секторного сканирования - малый размер зоны обзора на небольших глубинах - и преодолеть недостаток линейного сканирования - малый размер зоны обзора на больших глубинах.
Артефакты акустического изображения- наблюдаемые на экране прибора ложные объекты, аномалии и искажения, получаемые при УЗ исследовании. Артефакты можно разделить на две основные группы: аппаратурные артефакты, возникающие вследствие технических причин, в том числе из-за несовершенства прибора, и артефакты, связанные с физическими процессами прохождения ультразвука в биологических тканях.
Аппаратурные артефакты
Помехи и наводки. Помехи обычно вызываются электрическими приборами и оборудованием, работающими в непосредственной близости от УЗ прибора. Они имеют вид периодических или случайных быстро меняющихся светлых полос и ярких точек на экране прибора.
Боковые лепестки. В действительности эхо-сигналы могут приниматься не только в узкой области УЗ луча, называемой основным лепестком, но и в других направлениях, которые принято называть боковыми лепестками. В силу относительно низкого энергетического уровня боковых лепестков по сравнению с основным принятые ими эхо- сигналы, отраженные структурами, находящимися вне основного лепестка, как правило, малы и в целом не сказываются на изображении. Однако, если в направлении бокового лепестка находится хорошо отражающая поверхность, эхо-сигналы от нее могут быть большой амплитуды и восприниматься как полезные сигналы
Артефакты, вызванные физическими причинами
Искажение формы. Артефакты искажения формы возникают из-за того, что скорость звука в различных тканях может изменяться в определенных пределах, в то время как при формировании акустического изображения в приборе она принимается фиксированной (обычно - 1540 м/с).
Образование теней. Эти артефакты появляются в случае сильных отражений на границе сред со значительно отличающимися акустическими свойствами, например на границах мягкие ткани-воздух, мягкие ткани-камни (в почках, печени) и т.д.
«Хвост кометы». наблюдается в случае, когда в результате воздействия ультразвука возникают собственные вибрации объекта, например небольшого газового пузырька или инородного металлического тела в тканях организма.
|