Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Принцип действия. На обмотку статора подаётся переменное напряжение, под действием которого по этим обмоткам протекает ток и создаёт вращающееся магнитное поле
|
|
На обмотку статора подаётся переменное напряжение, под действием которого по этим обмоткам протекает ток и создаёт вращающееся магнитное поле. Магнитное поле воздействует на обмотку ротора и по закону электромагнитной индукции наводит в ней ЭДС. В обмотке ротора под действием наводимой ЭДС возникает ток. Ток в обмотке ротора создаёт собственное магнитное поле, которое вступает во взаимодействие с вращающимся магнитным полем статора. В результате на каждый зубец магнитопровода ротора действует сила, которая, складываясь по окружности, создаёт вращающий электромагнитный момент, заставляющий ротор вращаться.
Асинхронный двигатель состоит из неподвижной части статора, на котором расположены обмотка статора, и вращающейся части — ротора с обмоткой. Между ротором и статором имеется воздушный зазор, который для улучшения магнитной связи между обмотками делают по возможности малым. Обмотка статора представляет собой трехфазную или в общем случае многофазную обмотку, катушки которой размещают равномерно вдоль окружности статора. Фазы этой обмотки А-Х, B-Y и C-Z размещены равномерно по окружности статора; они соединяются «звездой» или «треугольником» и подключаются к сети трехфазного тока. Обмотку размещают равномерно вдоль окружности ротора. При работе двигателя она замкнута накоротко.
ОБЩИЕ СВЕДЕНИЯ О РЕЖИМАХ РАБОТЫ АСИНХРОННОГО ДВИГАТЕЛЯ.
В двигательном режиме разница частот вращения ротора и поля статора в большинстве случаев невелика и составляет лишь несколько процентов. Поэтому частоту вращения ротора оценивают не в абсолютных единицах (об/мин или об/с), а в относительных, вводя понятие скольжения:
s = (п с- п)/п с,
где п с— частота вращения поля (синхронная частота вращения); п — частота вращения ротора.
Скольжение выражается либо в относительных единицах (s = = 0, 02; 0, 025 и т. п.), либо в процентах (s - 2 %; 2, 5 % и т. п.).
Частота тока и ЭДС, наводимая в проводниках обмотки ротора, зависят от частоты тока и ЭДС обмотки статора и от скольжения:
f 2 - f 1 s; Е' 2 - E 1 s,
где Е 1— ЭДС обмотки статора; Е' 2— ЭДС обмотки ротора, приведенная к числу витков обмотки статора.
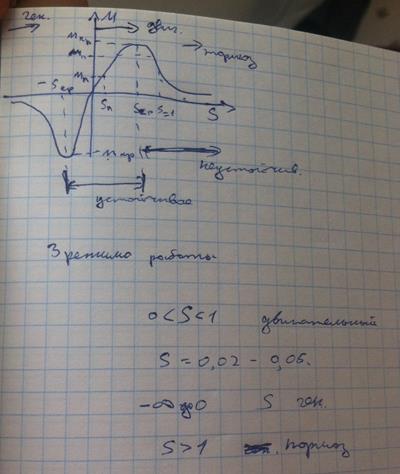
Теоретически асинхронная машина может работать в диапазоне изменения скольжения s = -∞...+∞ (рис. 2.1),
| Рис. 2.1. Механическая характеристика асинхронной машины |
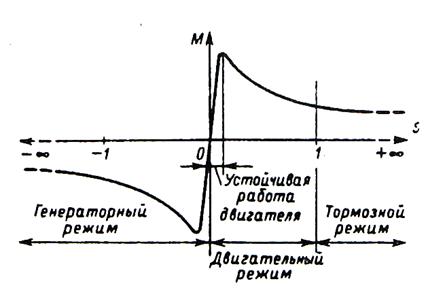
но не при s = 0, так как в этом случае п - п с и проводники обмотки ротора неподвижны относительно поля статора, ЭДС и ток в обмотке равны нулю и момент отсутствует. В зависимости от практически возможных скольжений различают несколько режимов работы асинхронных машин (рис. 2.1): генераторный режим при s < 0, двигательный при 0 < s < 1, трансформаторный при s = 1 и тормозной при s > 1. В генераторном режиме ротор машины вращается в ту же сторону, что и поле статора, но с большей частотой. В двигательном — направления вращения поля статора и ротора совпадают, но ротор вращается медленнее поля статора: п = п с(1 - s). В трансформаторном режиме ротор машины неподвижен и обмотки ротора и статора не перемещаются относительно друг друга. Асинхронная машина в таком режиме представляет собой трансформатор и отличается от него расположением первичной и вторичной обмоток (обмотки статора и ротора) и наличием воздушного зазора в магнитопроводе. В тормозном режиме ротор вращается, но направление его вращения противоположно направлению поля статора и машина создает момент, противоположный моменту, действующему на вал. Подавляющее большинство асинхронных машин используют в качестве двигателей, и лишь очень небольшое количество — в генераторном и трансформаторном режимах, в тормозном режиме — кратковременно.
Для оценки механической характеристики асинхронного двигателя моменты, развиваемые двигателем при различных скольжениях, обычно выражают не в абсолютных, а в относительных единицах, т. е. указывают кратность по отношению к номинальному моменту: М* = M/Мном. Зависимость М * = f(s) асинхронного двигателя (рис. 2.2) имеет несколько характерных точек, соответствующих пусковому М* п, минимальному М* min, максимальному М* max и номинальному М* ном моментам.
Пусковой момент М* пхарактеризует начальный момент, развиваемый двигателем непосредственно при включении его в сеть при неподвижном роторе (s - 1). После трогания двигателя с места его момент несколько уменьшается по сравнению с пусковым (см. рис. 2.2). Обычно М* min на 10...15 % меньше М* п. Большинство двигателей проектируют так, чтобы их М* min был больше М* ном, так как они могут достигнуть номинальной скорости лишь при условии, что момент сопротивления, приложенный к валу, будет меньше, чем М* min.
Максимальный момент М* max характеризует перегрузочную способность двигателя. Если момент сопротивления превышает М* max, двигатель останавливается. Поэтому М* max называют также критическим, а скольжение, при котором момент достигает максимума, — критическим скольжением sкp. Обычно s крне превышает 0, 1...0, 15; в двигателях с повышенным скольжением (крановых, металлургических и т. п.) s кpможет быть значительно большим.
В диапазоне 0 < s < s крхарактеристика М - f(s) имеет устойчивый характер. Она является рабочей частью механической характеристики двигателя. При скольжениях s > s кр двигатель в нормальных условиях работать не может. Эта часть характеристики определяет пусковые свойства двигателя от момента пуска до выхода на рабочую часть характеристики.