Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Буйковые средства измерений уровня
|
|
В основу работы буйковых уровнемеров положено физическое явление, описываемое законом Архимеда. Чувствительным элементом в этих уровнемерах является цилиндрических буек, изготовленный из материала с плотностью, большей плотности жидкости. Буек находится в вертикальном положении и частично погружен в жидкость. При изменении уровня жидкости в аппарате масса буйка в жидкости изменяется пропорционально изменению уровня. Преобразование веса буйка в сигнал измерительной информации осуществляется с помощью унифицированных преобразователей «сила — давление» и «сила — ток». В соответствии с видом используемого преобразователя силы различают пневматические и электрические буйковые уровнемеры.
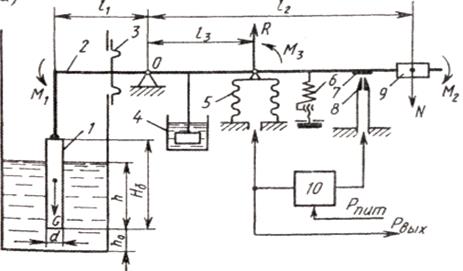
Схема буйкового пневматического уровнемера приведена на рисунке 1.19.
|
Рисунок 1.19 - Схема буйкового пневматического уровнемера
Уровнемер работает следующим образом. Когда уровень жидкости становится больше h0, часть буйка погружается в жидкость. Поэтому вес буйка уменьшается, а следовательно, уменьшается и момент М1, создаваемый буйком на рычаге 2. Так как М2 становится больше М1, рычаг 2 поворачивается вокруг точки О по часовой стрелке и прикрывает заслонкой 7 сопла 8 поэтому давление в линии сопла увеличивается. Это давление поступает в пневматический усилитель 10, выходной, сигнал которого является выходным сигналом уровнемера. Этот же сигнал одновременно посылает в сильфон отрицательной обратной связи 5 при действии давления Рвых. Возникает сила R, момент М3 которой совпадает по направлению с моментом М1, т.е. действие силы R направлено на восстановление равновесия рычага 2 движение измерительной системы преобразователя происходит до тех пор, пока сумма моментов всех сил, действующих на рычаг 2, не станет равной 0, то есть
М1 + М3 – М2 = 0 (1)
Представляя моменты М1, М2, М3 в виде произведений соответствующих сил и плеч, получим
Gl1 + Rl3 = Nl2,
где G – вес буйка при погружении его в жидкость на глубину h;
l1, l2, l3 - плечи действующих сил относительно точки О;
R – сила, развиваемая сильфоном 5;
N – вес противовеса.
Силы G и R определяем из следующих выражений:

 ;
;
R=fэфРвых,
где d и Нσ – диаметр и длина буйка (последняя определяет диапазон измерений уровнемера);
ρ – плотность материала буйка;
ρ ж – плотность жидкости;
h – глубина погружения буйка в жидкость, т.е. текущее значение измеряемого уровня;
fэф – эффективная площадь сильфона 5.
Подставляя выражения для сил G и R в равенство (1), получим

В этом равенстве  - вес буйка в воздухе.
- вес буйка в воздухе.
Если выбрать произведение  равным , чего можно достигнуть, изменяя, например, плечо l2 то
равным , чего можно достигнуть, изменяя, например, плечо l2 то

откуда
Рвых=  , (2)
, (2)
где k=  - коэффициент передачи уровнемера.
- коэффициент передачи уровнемера.
Выходной сигнал Рвых уровнемера линейно связан со значением измеряемого уровня h. Выражение  представляет собой изменение веса ∆ G буйка, поэтому равенство (2) можно преобразовать к виду
представляет собой изменение веса ∆ G буйка, поэтому равенство (2) можно преобразовать к виду
Рвых= k*∆ G, (3)
где k*= l1/(fэф l3) – постоянный коэффициент.
Зависимость (3) позволяет градуировать буйковые уровнемеры весовым методом.
Выходной сигнал пневматических буйковых уровнемеров изменяется в диапазоне 0, 02 – 0, 1 МПа при изменении уровня от нуля до максимального значения. Начальное значение выходного сигнала (0, 02МПа) задается пружиной 6 для предотвращения автоколебаний измерительной системы уровнемера служит демпфер 4 герметизация технологического аппарата при установке в нем чувствительного элемента достигается уплотнительной мембраной 3 при необходимости буек может быть установлен в выносной камере, располагаемой вне технологического аппарата. Минимальный верхний предел измерений пневматических уровнемеров – 0, 02 м, максимальная – 16 м.
Рассмотренной модификации пневматических уровнемеров выпускают уровнемеры, оснащенные унифицированным преобразователем «сила – давление» рисунок 1.20.
|
Рисунок 1.20 - Схема унифицированного преобразователя «сила – давление»
Принципиальное отличие преобразователя «сила – давление», от рассмотренного ранее – в наличии Г - образного рычага 3 с ножевой опорой 4, последняя может перемещаться вдоль Г – образного рычага, чем достигается изменение пределов измерений преобразователя в широком диапазоне. Отличительной особенностью преобразователя является и то, что конструкция рычага 1 позволяет подключать чувствительные элементы разных видов. Стрелками показаны направления усилий, развиваемых подключаемыми чувствительными элементами. Назначения остальных элементов преобразователя (пружины 2 корректора нуля, управляемого пневмосопротивления 5, сильфона обратной связи 6 и усилителя мощности 7).
Схема соединения буйка с унифицированным преобразователем приведена на рисунке 1.21 здесь 1 – груз, уравновешивающий вес буйка; 2 – Т – образный рычаг унифицированного преобразователя 3.

Рисунок1.21 - Схема соединения буйка с унифицированным преобразователем
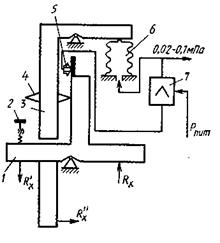
Для преобразования уровня в унифицированный токовый сигнал разработаны буйковые электрические уровнемеры, оснащенные унифицированным преобразователем «сила – ток» рисунок 1.22.
Рисунок 1.22 - Схема унифицированного преобразователя «сила – ток»
1 – Т – образный рычаг; 2 – пружина корректора нуля; 3 – Г – образный рычаг; 4 – ножевая опора; 5 – индикатор перемещений; 6 – рычаг обратной связи; 7 – элемент обратной связи; 8 – электронный усилитель.
Верхние пределы измерений уровнемера значениями 0, 02 – 16м.
Буйковые средства измерений уровня применяются при температуре рабочей среды от минус 40 до плюс 400°С и давлении рабочей среды до 16 МПа. Классы точности буйковых уровнемеров 1, 0 и 1, 5.