Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
|
|
Динамическая и механическая характеристики двигателя
⇐ ПредыдущаяСтр 3 из 3
| Электромеханические свойства двигателей постоянного тока |
Двигатели постоянного тока с плавным регулированием частоты вращения находят применение в приводах различных машин, станков и установок. Наряду с широким пределом регулирования частоты вращения они дают возможность получать механические характеристики различной (требуемой) жесткости.
Из курса электротехники известно, что уравнение механической характеристики [n =f(M)] можно записать в виде
 где коэффициенты Се и См зависят от конструктивных данных двигателя; U — напряжение сети; Ф — магнитный поток двигателя; R — сопротивление цепи якоря.
Формула показывает, что если U, R и Ф постоянны, механическая характеристика двигателя параллельного возбуждения представляет прямую линию (рис.). Если в цепи якоря нет сопротивлений, то механическая характеристика естественная (прямая 1, рис.а). Точка А соответствует номинальной частоте вращения nн, а no называют частотой идеального холостого хода. Жесткость характеристики определяется сопротивлением двигателя R', куда входит сопротивление обмотки якоря, дополнительных полюсов, компенсационной обмотки, щеток. Влияние сопротивления в цепи якоря на характеристику иллюстрируется прямыми 2 и 3 (см. рис.а).
где коэффициенты Се и См зависят от конструктивных данных двигателя; U — напряжение сети; Ф — магнитный поток двигателя; R — сопротивление цепи якоря.
Формула показывает, что если U, R и Ф постоянны, механическая характеристика двигателя параллельного возбуждения представляет прямую линию (рис.). Если в цепи якоря нет сопротивлений, то механическая характеристика естественная (прямая 1, рис.а). Точка А соответствует номинальной частоте вращения nн, а no называют частотой идеального холостого хода. Жесткость характеристики определяется сопротивлением двигателя R', куда входит сопротивление обмотки якоря, дополнительных полюсов, компенсационной обмотки, щеток. Влияние сопротивления в цепи якоря на характеристику иллюстрируется прямыми 2 и 3 (см. рис.а).
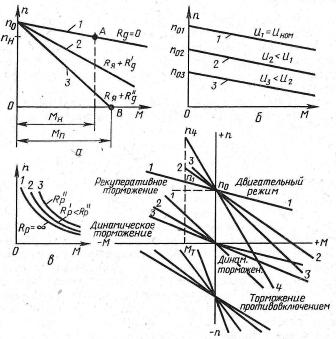 Рис.. Механические характеристики двигателей постоянного тока: а - при изменении сопротивления в цепи ротора, б - при изменении напряжения в цепи якоря двигателя постоянного тока с независимым возбуждением, в - при регулировании частоты вращения шунтированием обмотки возбуждения двигателя с последовательным возбуждением, г - при различных режимах торможения.
Формула позволяет оценить влияние напряжения U и потока Ф. При изменении U механическая характеристика двигателя с независимым возбуждением смещается параллельно естественной (рис.б); частота вращения холостого хода при постоянных R и U изменяется обратно пропорционально потоку.
Из формулы при n = 0 имеем
Рис.. Механические характеристики двигателей постоянного тока: а - при изменении сопротивления в цепи ротора, б - при изменении напряжения в цепи якоря двигателя постоянного тока с независимым возбуждением, в - при регулировании частоты вращения шунтированием обмотки возбуждения двигателя с последовательным возбуждением, г - при различных режимах торможения.
Формула позволяет оценить влияние напряжения U и потока Ф. При изменении U механическая характеристика двигателя с независимым возбуждением смещается параллельно естественной (рис.б); частота вращения холостого хода при постоянных R и U изменяется обратно пропорционально потоку.
Из формулы при n = 0 имеем

 т. е. пусковой момент пропорционален потоку.
Таким образом, частота вращения двигателя может регулироваться изменением магнитного потока, напряжения, подводимого к обмотке якоря, введением сопротивлений в цепь якоря.
Регулирование частоты вращения двигателя изменением Ф применяют довольно часто, так как регулирование происходит плавно, без больших потерь энергии, поддается автоматизации. Диапазон регулирования в сторону увеличения частоты вращения не превышает 1: 4, его можно расширить введением небольшой стабилизирующей обмотки последовательного возбуждения наряду с обмоткой дополнительных полюсов.
Регулирование частоты вращения изменением напряжения, подаваемого в цепь якоря двигателя, широко используют у двигателя независимого возбуждения (рис.б). В настоящее время выпускают двигатели с диапазоном регулирования до 1: 8, диапазон увеличивается при применении тиристорных преобразователей.
Расчет пуска двигателя
т. е. пусковой момент пропорционален потоку.
Таким образом, частота вращения двигателя может регулироваться изменением магнитного потока, напряжения, подводимого к обмотке якоря, введением сопротивлений в цепь якоря.
Регулирование частоты вращения двигателя изменением Ф применяют довольно часто, так как регулирование происходит плавно, без больших потерь энергии, поддается автоматизации. Диапазон регулирования в сторону увеличения частоты вращения не превышает 1: 4, его можно расширить введением небольшой стабилизирующей обмотки последовательного возбуждения наряду с обмоткой дополнительных полюсов.
Регулирование частоты вращения изменением напряжения, подаваемого в цепь якоря двигателя, широко используют у двигателя независимого возбуждения (рис.б). В настоящее время выпускают двигатели с диапазоном регулирования до 1: 8, диапазон увеличивается при применении тиристорных преобразователей.
Расчет пуска двигателя

 Пусковая реостатная диаграмма двухступенчатого пуска
Расчет времени пуска в холостую и при постоянном моменте сопротивления
Расчет времени пуска в холостую:
Реостатная характеристика
Пусковая реостатная диаграмма двухступенчатого пуска
Расчет времени пуска в холостую и при постоянном моменте сопротивления
Расчет времени пуска в холостую:
Реостатная характеристика
 Естественная характеристика
Естественная характеристика
 tпп=t1+t2=0.16+0.106=0.266 c
Расчет времени пуска под нагрузкой:
Реостатная характеристика
tпп=t1+t2=0.16+0.106=0.266 c
Расчет времени пуска под нагрузкой:
Реостатная характеристика
 JПР=0.125+0.239=0.364 кг/м2
JПР=0.125+0.239=0.364 кг/м2
 Естественная характеристика
Естественная характеристика
 tпп=t1+t2=0.6+0.19=0.79 c
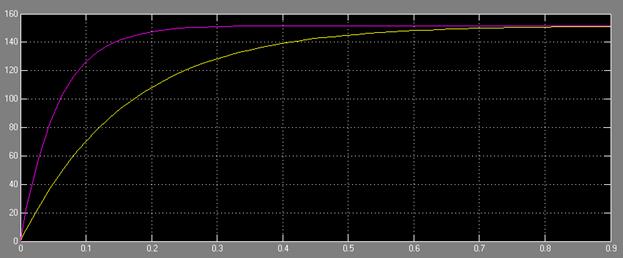
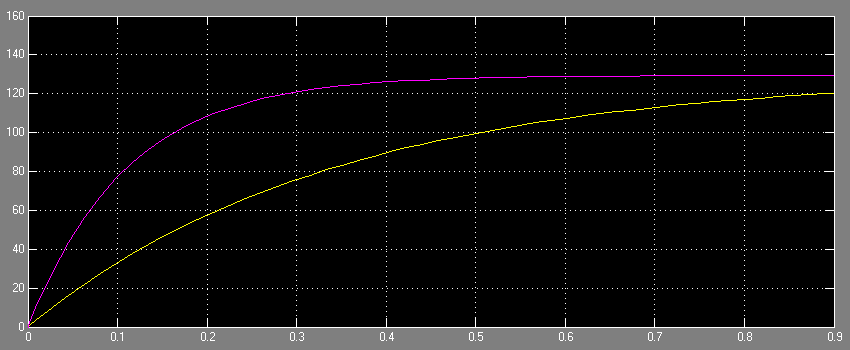
Моделирование электропривода при пуске по двухступенчатой характеристике:
tпп=t1+t2=0.6+0.19=0.79 c
Моделирование электропривода при пуске по двухступенчатой характеристике:
|
Данная страница нарушает авторские права?