Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Работа с приложением
|
|
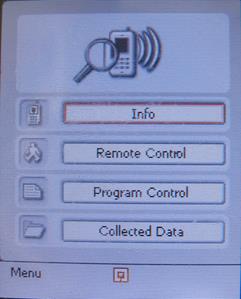
Главное меню программы состоит из 4 разделов:
· Info
· Remote Control
· Program Control
· Collected Data
1. Пункт Info выводит краткую справочную информацию по работе с программой:
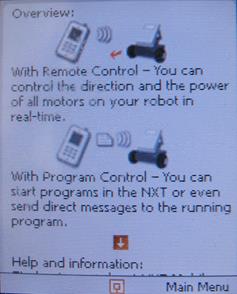
2. Remote Control позволяет управлять двигателями NXT в ручном режиме с мобильного телефона.

Для управления двигателем А используются клавиши:
- 1(вперед), 4(влево), 7(вправо), #(назад);
для управления двигателем В используются клавиши:
- 2(вперед), 5(влево), 8(вправо), 0(назад);
для управления двигателем С используются клавиши:
- 3(вперед), 6(влево), 9(вправо), *(назад).
Для управления двумя двигателями одновременно используется джойстик. В меню «Options» можно выбрать 2 двигателя, которыми необходимо управлять одновременно:

3. Program Control позволяет запускать программы из памяти NXT.
4. Collected Data позволяет получать фотографии с камеры NXT (при наличии таковой), а также позволяет получать показания датчиков на экран мобильного телефона.
Для выхода из приложения нажмите «Main menu» - «Exit»
Порядок выполнения работы:
1. Получить задание у преподавателя.
2. Выбрать необходимую модель мобильного телефона.
3. Установить мобильное приложение на телефон.
4. Проверить управление макетом робота через мобильный телефон.
5. Защитить лабораторную работу.
Контрольные вопросы:
1.Назначение пункта Info.
2. Назначение пункта Remote Control.
3. Назначение пункта Program Control.
4. Назначение пункта Collected Data.