Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Error information
|
|
Error message word RET_VAL is not used.
Input parameter description
| Parameter | Data type | Range | Default | Description |
| COM_RST | BOOL | FALSE | COMPLETE RESTART The block is provided with an initialization routine that is executed when input COM_RST is set. | |
| MAN_ON | BOOL | TRUE | MANUAL VALUE ON / enable manual operation. The feedback control system is interrupted when the input " manual operation on" is set. The manipulated value is preset to a manual value. | |
| PVPFC_ON | BOOL | FALSE | PROCESS VARIABLE PFCIPHFCY ON / Actual value - switch on periphery. To read the actual value from the periphery, connect input PV_PFC to the periphery and set the input " Actual value - switch on periphery". | |
| P_SEL | BOOL | TRUE | PROPORTIONAL ACTION ON / P-Component enabled. The different actions of the PID-algorithm can be enabled or disabled individually. The P-Component is enabled when the input " Select P-Component" is set. | |
| I_SEL | BOOL | TRUE | INTEGRAL ACTION ON / I-Component enabled. The different actions of the PID-algorithm can be enabled or disabled individually. The I-Component is enabled when the input " Select I-Component" is set. | |
| INT_HOLD | BOOL | FALSE | INTEGRAL ACTION HOLD / hold I-Component. You can freeze the output value of the integrator by setting the input " Hold I-Component". | |
| I_ITL_ON | BOOL | FALSE | INITIALIZATION OF THE INTEGRAL ACTION / set I-Component. It is possible to set the output of the integrator to input value I_ITLVAL. Set the input " set I-Component " for this purpose. | |
| D_SEL | BOOL | FALSE | DFCIVATIVE ACTION ON / D-Component enabled. The different actions of the PID-algorithm can be enabled or disabled individually. The D-Component is enabled when the input " Select D-Component" is set. | |
| CYCLE | TIME | > = 1ms | T#1s | SAMPLE TIME. the sample time between calls to blocks must be constant. Input " Cycle" specifies the time between the different calls to the block. |
| SP_INT | REAL | -100.0...100.0 (%) or phys. value 1) | 0.0 | INTFCNAL SETPOINT / Internal set point. The " Internal set point" input defines a set point value. |
| PV_IN | REAL | -100.0...100.0 (%) or phys. value 1) | 0.0 | PROCESS VARIABLE IN / actual value input. The " process variable in" input can be used to configure an implementation value or an to connect an external floating point process variable. |
| PV_PFC | WORD | W#16#0000 | PROCESS VARIABLE PFCIPHFCY / actual peripheral value. The process variable in peripheral format is connected to the controller via input " actual peripheral value". | |
| MAN | REAL | -100.0...100.0 (%) or phys. value 2) | 0.0 | MANUAL VALUE. Input " manual value" is used to specify a manual input value via the operating and monitoring function. |
| GAIN | REAL | 2.0 | PROPORTIONAL GAIN / proportional coefficient. Input " proportional gain" defines the gain of the controller. | |
| TI | TIME | > = CYCLE | T#20s | RESET TIME / Integration time. Input " Integration time" determines the time response of the integrator. |
| TD | TIME | > = CYCLE | T#10s | DFCIVATIVE TIME / Differentiation time. Input " Differentiation time" determines the time response of the differentiator. |
| TM_LAG | TIME | > = CYCLE/2 | T#2s | TIME LAG OF THE DFCIVATIVE ACTION / time lag of the D-Component. The algorithm for the D-Component contains a time lag that can be configured via the input " time lag of the D-Component". |
| DEADB_W | REAL | > = 0.0 (%) or phys. value 1) | 0.0 | DEAD BAND WIDTH. The error signal (difference) is routed via a dead band. The " Dead Band Width" Input determines the magnitude of the dead band. |
| LMN_HLM | REAL | LMN_LLM...100.0 (%) or phys. value 2) | 100.0 | MANIPULATED VALUE HIGH LIMIT. The manipulated value is always limited to an upper and a lower value. Input " Manipulated Value High Limit" defines the upper limit. |
| LMN_LLM | REAL | -100.0... LMN_HLM (%) or phys. value 2) | 0.0 | MANIPULATED VALUE LOW LIMIT The manipulated value is always limited to an upper and a lower value. Input " Manipulated Value Low Limit" defines the lower limit. |
| PV_FAC | REAL | 1.0 | PROCESS VARIABLE FACTOR. The value applied to input " Process Variable Factor" is multiplied by the process variable. This input is used to adjust the range of the process variable. | |
| PV_OFF | REAL | 0.0 | PROCESS VARIABLE OFFSET. The value applied to input " Process Variable Factor" is added to the process variable. This input is used to adjust the range of the process variable. | |
| LMN_FAC | REAL | 1.0 | MANIPULATED VALUE FACTOR. The value applied to input " Manipulated Value Factor" is multiplied by the manipulated value. This input is used to adjust the range of the process variable. | |
| LMN_OFF | REAL | 0.0 | MANIPULATED VALUE OFFSET. The value of the input " Manipulated Value Offset" is added to the manipulated value. This input is used to adjust the range of the process variable. | |
| I_ITLVAL | REAL | -100.0...100.0 (%) or phys. value 2) | 0.0 | INITIALIZATION VALUE OF THE INTEGRAL ACTION. The output of the integrator can be preset via input I_ITL_ON. The initialization value is applied to input " Initialization Value of the I-Component". |
| DISV | REAL | -100.0...100.0 (%) or phys. value 2) | 0.0 | DISTURBANCE VARIABLE. A disturbance quantity can be added by introducing the respective value via input " Disturbance Value". |
1) Units of the parameter in the set-point and process variable branch must be identical.
2) Units of the parameter in manipulated value branch must be identical.
Description of the output parameters
| Parameter | Data type | Range | Default | Description |
| LMN | REAL | 0.0 | MANIPULATED VALUE. The effective manipulated value is available in floating point form at the output " Manipulated Value". | |
| LMN_PFC | WORD | W#16#0000 | MANIPULATED VALUE PFCIPHFCY / Manipulated Value Periphery. The manipulated value in peripheral format is available at output " Manipulated Value Periphery" and connected to the controller. | |
| QLMN_HLM | BOOL | FALSE | HIGH LIMIT OF MANIPULATED VALUE REACHED. The manipulated value is always limited to an upper and a lower value. Output " High Limit of Manipulated Value Reached" signals that the upper limit value has been exceeded. | |
| QLMN_LLM | BOOL | FALSE | LOW LIMIT OF MANIPULATED VALUE REACHED. The manipulated value is always limited to an upper and a lower value. Output " Low Limit of Manipulated Value Reached" signals that the lower limit value has been exceeded. | |
| LMN_P | REAL | 0.0 | PROPORTIONALITY COMPONENT / P-Component. Output " P-Component" contains the proportional component of the manipulated value. | |
| LMN_I | REAL | 0.0 | INTEGRAL COMPONENT / I-Component. Output " I-Component" contains the integral component of the manipulated value. | |
| LMN_D | REAL | 0.0 | DFCIVATIVE COMPONENT / D-Component. Output " D-Component" contains the differential component of the manipulated value. | |
| PV | REAL | 0.0 | PROCESS VARIABLE. The effective value of the " Process Variable" is available at this output. | |
| FC | REAL | 0.0 | FCROR SIGNAL / Error Signal. The effective error signal or difference is available at output " Error Signal". |
Непрерывный контроль с использованием SFB 41 " CONT_C"
Внимание
Эти SFB это существует только в нескольких процессоров. Пожалуйста, обратитесь к руководству для вашего конкретного процессора, чтобы определить, является ли SFB требуется для интегрированных средств управления осуществляется вашего процессора.
Введение
SFB 41 используется для контроля технологических процессов автоматизации систем с непрерывным входных и выходных величин. Индивидуальные функции ПИД-регулятора может быть включена или отключается с помощью параметров для настройки контроллера к требованиям процесса управления.
Приложение
Контроллер может быть использован в качестве PID уставки контроллера, как самостоятельная единица управления или в нескольких конфигурациях цикла управления, как каскадные, комбинированной или пропорциональный регулятор. Его работа основана на алгоритме ПИД-контроля выборки регулятора с аналоговым выходным сигналам. Это может быть продлен на формирователь импульсов для генерации широтно-импульсной модуляции выходных сигналов, которые необходимы для включения-выключения контроля или три режима управления пропорциональных приводов.
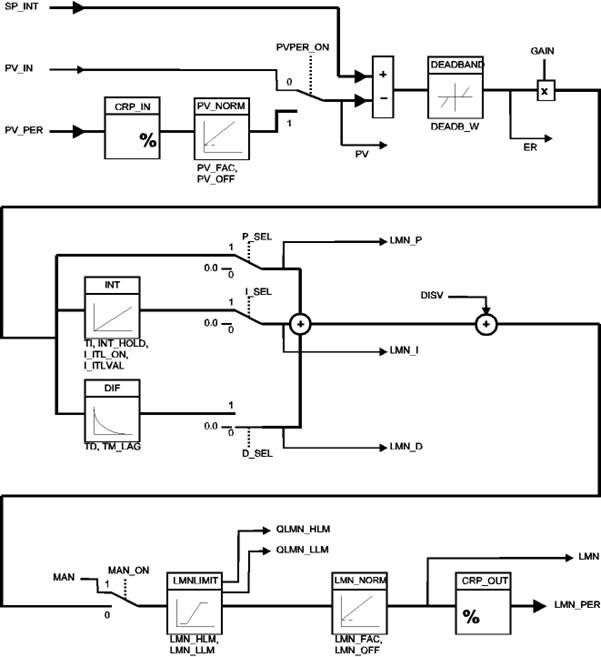
Описание
В дополнение к функции для заданного и фактического значения филиалов, SFB 41 также включает в себя полный ПИД-регулятор с аналоговым выходом контрольно-переменных, а также ручные настройки для регулировки управляющей переменной.
В следующем описании содержится объяснение различных функций:
Set-точка ветвления
Уставки определяется как число с плавающей точкой отформатированные значения на входе SP_INT.
Фактическое значение филиал
Фактические значения могут быть поставлены в периферические или в формате с плавающей точкой.
Периферийные PV_PFC значение преобразуется в число с плавающей точкой от -100.... +100% К функции CRP_IN в соответствии со следующей формулой:
Выход CRP_IN = PV_PFC *
Функция PV_NORM может нормализовать выход CRP_IN в соответствии со следующей формулой:
Выход PV_NORM = (выход CRP_IN) * PV_FAC + PV_OFF
где PV_FAC предустановлен на 1 и PV_OFF 0.
Расчет разницы (ошибки) значения
Ошибка результате разницы между заданным значением и фактическим значением. Вполне возможно, что небольшое количество колебаний происходит за счет квантования контрольный переменных (например, PULSEGEN, когда широтно-импульсная модуляция используется). Для подавления этого колебания разницы значения проходят через зоны нечувствительности (гистерезис). Мертвая зона отключается при DEADB_W входной параметр установлен в 0.
PID-алгоритма
ПИД-алгоритм работает в качестве регулятора положения алгоритма, где пропорциональная, интегральная (INT) и дифференциальный часть (DIF) параллельны и могут быть включены или исключены индивидуально. Это может быть использовано для реализации P, PI, PD и ПИД-регуляторов, а также чистого Я контроллеров.
Ручное управление
Вы можете выбрать ручной или автоматический режим. В ручном режиме управления переменной отслеживается вручную значение.
Внутренне интегратор (INT) установлен в LMN - LMN_P - DISV и отличием (DIF) устанавливается в 0. Затем эти данные синхронизированы внутренне для обеспечения плавного перехода в автоматический режим.
Управление обработкой значения
LMNLIMIT функция ограничивает манипулировать значениями в диапазоне значений, которые могут быть установлены. Сообщение бита обеспечивают индикацию входных значений за допустимые пределы.
Выход LMNLIMIT можно нормировать функцию LMN_NORM в соответствии со следующей формулой:
LMN = (выход LMNLIMIT) * LMN_FAC + LMN_OFF
Были LMN_FAC предустановлен на 1 и LMN_OFF 0.
Так как управляющее значение также доступна в периферической формате с плавающей запятой LMN превращается в периферийный значение при помощи CRP_OUT функции:
LMN_PFC = LMN *
Добавление количество нарушений
Можно добавить количество нарушений или стоимости через вход DISV.
Инициализация
SFB 41 снабжен процедуру инициализации, которая выполняется при COM_RST входной параметр установлен в 1.
Инициализации устанавливает интегратор внутренне для инициализации значения, содержащиеся в I_ITVAL. Когда другой вызов интегратора выдается это продолжается на уровне циклического прерывания.
Все остальные выходы устанавливаются в их значения по умолчанию.
Информация об ошибках
Сообщение об ошибке словом RET_VAL не используется.

Input parameter description
| Parameter | Data type | Range | Default | Description |
| COM_RST | BOOL | FALSE | полный перезапуск Блок снабжен процедуру инициализации, которая выполняется при входе COM_RST установлен. | |
| MAN_ON | BOOL | TRUE | Вручную значение ON / включить ручное управление.Система управления с обратной связью прерывается при входе " ручного управления на" установлен.Управляющее значение задается в ручную значение. | |
| PVPFC_ON | BOOL | FALSE | Процесс VARIABLE PFCIPHFCY ON / фактическое значение - переключатель на периферии. Чтобы узнать текущее значение с периферии, подключить вход PV_PFC к периферии и установить вход " фактическое значение - переключатель на периферии». | |
| P_SEL | BOOL | TRUE | Пропорциональное действие ON / P-компонент включен.Различные действия ПИД-алгоритм может быть включена или отключена по отдельности.P-компонент включен, когда вход " Select P-компонента" установлен. | |
| I_SEL | BOOL | TRUE | Интегральное действие ON / I-компонент включен.Различные действия ПИД-алгоритм может быть включена или отключена по отдельности.I-компонент включен, когда вход " Select I-компонента" установлен. | |
| INT_HOLD | BOOL | FALSE | Интегральное действие HOLD / удерживать I-компонента. Вы можете заморозить выходное значение интегратора, установив вход " Hold I-компонентов". | |
| I_ITL_ON | BOOL | FALSE | ИНИЦИАЛИЗАЦИЯ интегрального действия / установить I-компонента. Можно установить выходе интегратора для ввода I_ITLVAL значение. Установите вход " установлен I-компонент" для этой цели. | |
| D_SEL | BOOL | FALSE | DFCIVATIVE ACTION ON / D-компонент включен.Различные действия ПИД-алгоритм может быть включена или отключена по отдельности.D-компонент включен, когда вход " Select D-Компонент" установлен. | |
| CYCLE | TIME | > = 1ms | T#1s | Время выборки.Время выборки между вызовами блока должно быть постоянным. Input " Цикл" определяет время между различными вызовами блока. |
| SP_INT | REAL | -100.0...100.0 (%) or phys. value 1) | 0.0 | INTFCNAL SETPOINT / Внутренние точки." Внутренняя уставка" вход определяет значение уставки. |
| PV_IN | REAL | -100.0...100.0 (%) or phys. value 1) | 0.0 | Переменной процесса в / вход фактического значения." Переменной процесса в" вход может быть использован для настройки значение реализации или для подключения внешнего переменной с плавающей точкой процесса. |
| PV_PFC | WORD | W#16#0000 | ПРОЦЕСС PFCIPHFCY VARIABLE / фактический периферической значение. Переменная процесса в периферических формате подключен к контроллеру через вход " фактически периферической значение". | |
| MAN | REAL | -100.0...100.0 (%) or phys. value 2) | 0.0 | Вручную значение. Input " Руководство значение" используется для определения значения ручного ввода через операционную и функции контроля. |
| GAIN | REAL | 2.0 | Пропорционального усиления / пропорциональный коэффициент. Input " пропорционального усиления" определяет коэффициент усиления контроллера. | |
| TI | TIME | > = CYCLE | T#20s | Сброс времени / Integration времени. Вход " Время интегрирования" определяет время отклика интегратора. |
| TD | TIME | > = CYCLE | T#10s | DFCIVATIVE TIME / Дифференциация времени. Input " Дифференциация время" определяет время отклика отличием. |
| TM_LAG | TIME | > = CYCLE/2 | T#2s | Временным лагом в DFCIVATIVE АКЦИИ / времени задержки D-компонентов.Алгоритм D-компонент содержит временной лаг, который можно настроить через вход " временным лагом в D-компонентов". |
| DEADB_W | REAL | > = 0.0 (%) or phys. value 1) | 0.0 | DEAD ширина полосы.Сигнал ошибки (разности) направляется через мертвую зону." Мертвые Ширина полосы" Input определяет величину мертвой зоны. |
| LMN_HLM | REAL | LMN_LLM...100.0 (%) or phys. value 2) | 100.0 | Управляющее значение верхнего предела.Манипулировали значение всегда ограничена верхним и нижним значением. Input " управляющее значение верхнего предела" определяет верхний предел. |
| LMN_LLM | REAL | -100.0... LMN_HLM (%) or phys. value 2) | 0.0 | Управляющее значение LOW LIMIT управляющей переменной всегда ограничена верхним и нижним значением. Input " управляющее значение Low Limit" определяет нижний предел. |
| PV_FAC | REAL | 1.0 | Переменной процесса FACTOR.Значение подается на вход «Фактор переменной процесса" умножается на переменную процесса. Этот вход используется для регулировки диапазона процесса variable.es нижнего предела. | |
| PV_OFF | REAL | 0.0 | Процесс VARIABLE OFFSET.Значение подается на вход «Фактор переменная процесса" добавляется к переменной процесса. Этот вход используется для настройки диапазона переменной процесса. | |
| LMN_FAC | REAL | 1.0 | Манипулировали значение коэффициента.Значение подается на вход " управляющее значение фактора", умножается на управляющее значение. Этот вход используется для настройки диапазона переменной процесса. | |
| LMN_OFF | REAL | 0.0 | Управляющей переменной OFFSET.Значение входного " управляющее значение Offset" добавляется к управляющей переменной. Этот вход используется для настройки диапазона переменной процесса. | |
| I_ITLVAL | REAL | -100.0...100.0 (%) or phys. value 2) | 0.0 | Начального значения интегрального действия.Выход интегратора может быть установлено через вход I_ITL_ON.Инициализации значение подается на вход " Инициализация Значение I-компонентов". |
| DISV | REAL | -100.0...100.0 (%) or phys. value 2) | 0.0 | Начального значения интегрального действия.Выход интегратора может быть установлено через вход I_ITL_ON.Инициализации значение подается на вход " Инициализация Значение I-компонентов". |
1) Units of the parameter in the set-point and process variable branch must be identical.
2) Units of the parameter in manipulated value branch must be identical.
Description of the output parameters
| Parameter | Data type | Range | Default | Description |
| LMN | REAL | 0.0 | Управляющее значение.Эффективное управляющее значение доступно в форме плавающая точка на выходе " управляющее значение". | |
| LMN_PFC | WORD | W#16#0000 | Манипулировали PFCIPHFCY VALUE / управляющее значение Периферии.Управляющее значение в периферической формате доступна на выход " управляющее значение Периферия" и подключен к контроллеру. | |
| QLMN_HLM | BOOL | FALSE | Верхний предел управляющее значение достигнуто.Манипулировали значение всегда ограничена верхним и нижним значением. Выход " верхний предел управляющее значение достигнуто" сигналы о том, что верхний предел был превышен. | |
| QLMN_LLM | BOOL | FALSE | Нижний предел управляющее значение достигнуто.Манипулировали значение всегда ограничена верхним и нижним значением. Выход " нижнего предела управляющее значение достигнуто" сигналы о том, что нижний предел был превышен. | |
| LMN_P | REAL | 0.0 | Пропорциональности COMPONENT / P-компонента. Выход " P-компонента" содержит пропорциональный компонент управляющей переменной. | |
| LMN_I | REAL | 0.0 | Неотъемлемого компонента / I-компонента. Выход " I-компонента" содержит составной частью управляющей переменной. | |
| LMN_D | REAL | 0.0 | DFCIVATIVE COMPONENT / D-компонентов. Выход " D-Компонент" содержит дифференциальный компонент управляющей переменной. | |
| PV | REAL | 0.0 | Переменной процесса.Эффективное значение " переменной процесса" можно ознакомиться на этот выход. | |
| FC | REAL | 0.0 | FCROR SIGNAL / сигнал ошибки.Полезного сигнала ошибки или разницы можно получить на выходе " сигнал ошибки". |