Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Принцип автоматизированного счисления частноортодромических координат.
|
|
Счисление – это расчет текущих координат, поэтому основной частью любой автоматизированной системы счисления пути является навигационный вычислитель. Он может быть аналоговым, то есть основанным на электромеханических устройствах, или цифровым (компьютер). На вход вычислителя непрерывно поступает информация от датчиков, измеряющих необходимые для счисления навигационные элементы (например, курс, угол сноса, скорость). На выходе вычислителя – счисленные координаты, а также, возможно, скорости их изменения. Эти выходные данные отображаются на индикаторах для экипажа, а также могут поступать в бортовую систему автоматического управления полетом, которая обеспечивает выполнение полета по ЛЗП. В современных навигационных комплексах счисленное МС может отображаться графически на дисплее на синтезированной электронным путем карте или на авиационном планшете на фоне бумажной карты.
Счисленное место самолета характеризуется его координатами, следовательно, должна быть выбрана система координат.
В системах счисления пути, основанных на использовании измеренных скоростей ВС, обычно используются ортодромические системы координат. Наиболее часто – частноортодромическая, связанная с ЛЗП участка маршрута. Тот факт, что поверхность земли при счислении принимается за плоскость, не вносит существенной погрешности в рассчитанные координаты, если удаление ВС от осей системы координат не превышает нескольких сотен километров.
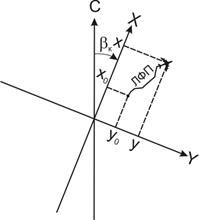
Рис. 8.7. Прямоугольная система координат
Рассмотрим абстрактную систему прямоугольных координат OXY (рис. 8.7). Для того, чтобы она относительно земли занимала вполне определенное положение, необходимо указать:
а) куда направлены ее оси;
б) где располагается начало системы координат (точка пересечения осей, соответствующая нулевым значениям координат).
Ориентация осей обеспечивается путем ввода в навигационный вычислитель угла карты.
Угол карты (β к, УК) – это угол между северным направлением меридиана и направлением одной из осей системы координат. Если установлен, например, УК=315, то это означает, что главная ось системы координат направлена на северо-запад. Вторая ось, поскольку система координат прямоугольная, ориентируется автоматически.
А вот расположение начала системы координат задается путем установки начальных координат МС.
Путем ввода в навигационный вычислитель координат ВС в момент начала счисления пилот и задает расположение системы координат.
Впрочем, для самого вычислителя никакой системы координат не существует. Он просто производит вычисления по заложенным в него алгоритмам. Это пилот интерпретирует результаты этих вычислений как координаты.
В момент начала счисления текущие координаты ВС совпадают с начальными, но в процессе полета они изменяются в соответствии с перемещением ВС. Первое, что делает навигационный вычислитель для определения текущих координат – раскладывает вектор путевой скорости W на составляющие Wx и Wy по осям выбранной системы координат. Для этого ему необходимо знать модуль и направление вектора W, а также направление осей.
Теперь, когда известна скорость вдоль каждой оси, можно рассчитать и расстояние, пройденное по этой оси от начального значения соответствующей координаты.
Если бы составляющие скорости по осям были бы постоянными, то текущие координаты самолета x, y определялись бы по простым формулам:
x=x0 + Wxt;
y=y0 + Wyt,
где t – время полета от начальной точки с координатами x0, y0.
Но в общем случае составляющие скорости непрерывно меняются, поскольку изменяется и модуль, и направление вектора путевой скорости. Ведь самолет может изменить курс и истинную скорость, изменяется и ветер.
С точки зрения математики скорость – это производная расстояния, то есть скорость (быстрота) его изменения. Взятие производной называется дифференцированием. Операция, обратная дифференцированию, – это интегрирование, позволяющее по известной производной найти саму величину (закон ее изменения). Следовательно, для определения пройденного расстояния по каждой оси необходимо в общем случае интегрировать составляющую скорости по этой оси.
Можно к этому же выводу подойти и с другой стороны. Скорость непрерывно изменяется, но на любом бесконечно малом отрезке времени ее можно считать постоянной и определить бесконечно малое расстояние, пройденное за это время, простым умножением времени на скорость. Но весь пройденный путь является суммой бесконечно большого количества бесконечно малых участков. А сумма бесконечно большого количества бесконечно малых слагаемых – это и есть определенный интеграл.
Таким образом, в общем виде уравнения счисления можно записать:
 (8.1)
(8.1)
Навигационный вычислитель непрерывно интегрирует составляющие скорости, определяя приращения координат к их начальным значениям.
Текущие счисленные значения координат отображаются для экипажа на индикаторах. По какой бы траектории ни летел самолет, пилот может определить по ним координаты в данный момент времени.