Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Роботизированное оборудование для разделки полутуш
|
|
Промышленные роботы — машины нового поколения технических средств переработки. Они появились в 60-х годах прошлого столетия и за короткий исторический срок превратились из машин, способных выполнять операции по жесткой программе, в гибкие системы, способные приспосабливаться к окружающей среде, изменяющимся условиям труда, разнообразным размерам исходного сырья.
Робот — универсальный автомат для осуществления механических действий, подобных тем, которые производит человек, выполняющий физическую работу. С помощью промышленных роботов можно автоматизировать процессы, которые невозможно автоматизировать другими способами. К таким процессам относится и переработка сложных биологических объектов: туши и полутуши сельскохозяйственных животных. При этом учитываются нестабильность их исходных параметров (масса, габариты, строение внешнее и внутреннее и т. д.) и требования к стабильности конечного продукта по размерам, конфигурации плоскостей раздела. Отдельным, но весьма важным фактором являются требования санитарии.
Промышленный робот как машина повторяет в известной степени операции, выполняемые рукой человека, поэтому в его строении имеются и механические органы, аналогичные по назначению органам человека. Механизм схвата робота, который удерживает предметы или инструмент, аналогичен кисти руки человека. Схват крепят на механизме — рука со многими степенями свободы. Степени свободы — это число координат, по которым может перемешаться рукой деталь или инструмент. Чем больше степеней свободы, тем больше гибкость промышленного робота. Руку закрепляют в механизм позиционирования, перемещающий и механизм руки. Все эти механизмы снабжают датчиками положения, определяющими нахождение схвата в пространстве.
Управляющая система робота имеет ЭВМ, хранящую информацию о выполняемых операциях и программы для выполнения их корректировки в связи с изменяющимся внешними условиями.
Для «общения» с внешним миром современные промышленные роботы оснащают датчиками зрения, осязания (тактильными) и, если необходимо, слуха. Установка для разделки свиных полутуш с использованием промышленного робота создана в Норвегии. Она состоит из стационарного промышленного робота фирмы «Кука Роботер», видеосистемы, конвейера для подачи туш и фиксаторов.
По гигиеническим нормам робот (рис. 11) помещен в герметичную кабину 1. В кабине находится энергетический блок 2 робота и механизм позиционирования 5. Рука робота 3 выходит из кабины и закрывается защитным чехлом. На схвате робота закреплен дисковый нож 4. Робот имеет шесть степеней свободы, усилие на руке, перемещающей схват, до 2 кН.
Установка позволяет разделать полутуши на четыре отруба с производительностью до 300 туш в 1 час.
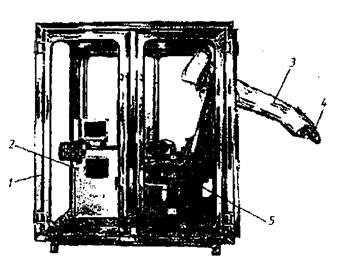
Рис. 11. Робот для разделки полутуш свиней:
1 — герметичная кабина; 2 — энергетический блок: робота; 3-- рука; 4 — нож; 5 — механизмпозиционировании
Другая установка с применением промышленного робота создана фирмой «Премиум-Фляйш» (Германия). В ней также использован промышленный робот фирмы «Кука Роботер» (Германия) с шестью степенями свободы. Установка снабжена системой анализа видеоизображения, подающим цепным транспортером и узлом фиксации полутуши. В этой установке робот закрыт сверху герметичным матерчатым чехлом.
Свиные охлажденные полутуши транспортером подаются к участку разделки, где фиксируются на специальной вертикальной пластине механическими рычагами. Затем со стороны пластины создается разрежение, и полутуша присасывается. После этого с помощью двух видеокамер происходит сканирование и замер полутуш. Информация поступает в ЭВМ, и включается программа работы робота. Разжимаются рычаги, и дисковым ножом, закрепленным на схвате робота, производится разделка полутуши.
Разрезанная полутуша выносится транспортером с участка разделки, снимается разрежение, и отруба поступают на дальнейшую переработку.
Установка позволяет без участия человека перерабатывать до 500 полутуш в 1 час. При этом повышается точность разделки. Программы управляющей системы робота позволяют осуществлять любую необходимую разделку полутуш. Но для этого предварительно обследуют объекты обработки, замеряют характерные внешние размеры, определяют траектории движения инструмента. Эти замеры математически обрабатывают и на базе полученных зависимостей разрабатывают программы для ЭВМ.
При применении роботов обеспечивается высокое качество разделки полутуш за счет равномерности разруба. Робот не устает, может работать без перерыва с высокой интенсивностью, Применение роботов для разделки полутуш и для выполнения ряда других операций весьма перспективно.