Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Лекция № 5. Преобразователи линейных размеров в электрический сигнал.
|
|
Потенциометрические преобразователи перемещений. Индуктивные и индукционные преобразователи. Частотные преобразователи. Датчик угловых перемещений. Обратная измерительная связь. Электросиловой токовый преобразователь
В данной лекции рассматриваются принципы преобразования перемещений в электрический сигнал. Эти преобразования выполняются ёмкостными, потенциометрическими, индуктивными и индукционными преобразователями. На приведенном ниже рисунке показаны схемы плоскостного (а) и цилиндрического (б) датчиков перемещений.
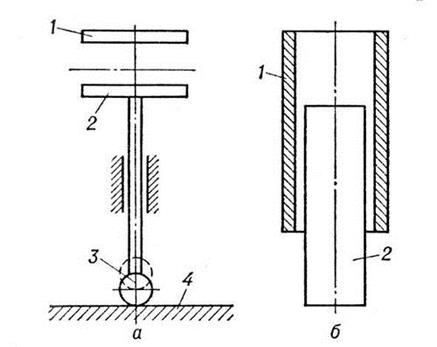
Как известно, ёмкость плоского конденсатора равна:
 , где S – площадь плоских электродов, d – расстояние между электродами 1 и 2. ε 0 = 8, 85·10-12 Ф/м – диэлектрическая постоянная, ε – диэлектрическая проницаемость среды. При перемещении объекта, в который упирается шток с шариком, изменяется ширина зазора между электродами d и, соответственно, изменяется ёмкость конденсатора.
, где S – площадь плоских электродов, d – расстояние между электродами 1 и 2. ε 0 = 8, 85·10-12 Ф/м – диэлектрическая постоянная, ε – диэлектрическая проницаемость среды. При перемещении объекта, в который упирается шток с шариком, изменяется ширина зазора между электродами d и, соответственно, изменяется ёмкость конденсатора.
Ёмкость коаксиального конденсатора равна:
 ,
,
где L – длина перекрывающейся части внутреннего и наружного цилиндрических электродов конденсатора, D – внутренний диаметр наружного цилиндра, d – наружный диаметр внутреннего цилиндра. При перемещении одного электрода относительно другого меняется величина L и ёмкость, которая регистрируется, например, универсальным мостом. В этом случае прибор будет иметь шкалу
Потенциометрические датчики перемещений используют принцип деления напряжения на резисторе. На рисунке приведена схема потенциометрического датчика перемещений. Реостатные потенциометрические преобразователи (реостаты и потенциометры) представляют собой переменные электрические сопротивления, величина которых зависит от положения токосъемного контакта. Реостаты включаются в цепи, где измеряется их сопротивление, а потенциометры—в цепи, где измеряются напряжения, т. е. переменное сопротивление служит делителем напряжения. Характеристики реостатов и потенциометров выражаются зависимостями

где R и U — соответственно выходное сопротивление и напряжение преобразователя;
x —перемещение контакта.
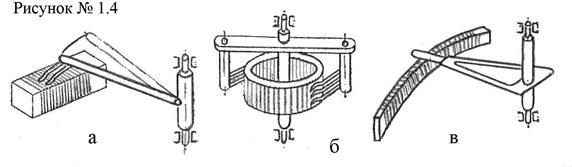
Наибольшее распространение получили реостаты и потенциометры непрерывной намотки, в которых сопротивлением служит намотанная в один ряд на каркас проволока, по зачищенной поверхности которой скользит токосъемный контакт. На рисунке показаны различные типы потенциометрических преобразователей.
Каркасы изготовляют из изоляционных материалов — пластмассы, текстолита, керамики и т. п.; для намотки применяют проволоку из благородных металлов (платины, золота, палладия), а также из константана, манганина, нихрома.
Использование потенциометров в измерительных цепях может привести к возникновению погрешностей по следующим причинам.
Во-первых, из-за наличия зоны нечувствительности, вызванной тем, что перемещение контакта в пределах одного витка проволоки не вызывает изменения выходного сигнала; это особенно ощутимо при использовании толстой проволоки.
Во-вторых, из-за неравномерности характеристики, которая может быть вызвана непостоянством диаметра, удельного сопротивления провода, шага намотки, натяжения провода и т. п.
В-третьих, из-за люфтов в механизме перемещения контакта.
При использовании потенциометров в качестве делителей напряжения следует учитывать влияние сопротивления нагрузки на выходное напряжение, т. е. влияние нагрузки на статическую характеристику преобразователя. Входной величиной преобразователя является положение подвижного контакта, определяемое относительным перемещением. Выходной величиной служит напряжение, снимаемое с сопротивления.
Разновидностями реостатов и потенциометров являются так называемые ламельные устройства, где подвижный контакт скользит по неподвижным контактам (ламелям), к которым припаяны постоянные сопротивления. В таких устройствах сопротивление изменяется в широких пределах при значительных его величинах (несколько сотен и тысяч килоом). В ряде измерительных схем используются функциональные потенциометры, в которых сопротивление связано с перемещением контакта не линейно, а реализует какую-либо функциональную зависимость. Это достигается переменным шагом намотки или намоткой проволоки на профилированный каркас, что дает переменную длину витка и, следовательно, переменное сопротивление при линейном перемещении контакта. Основной недостаток реостатных и потенциометрических преобразователей связан с наличием электрического подвижного контакта, т. е. связан с возможностью его износа, загрязнения, разрыва.
Этого недостатка лишены индуктивные и индукционные преобразователи. Индуктивные преобразователи служат для преобразования перемещения в изменение индуктивности, а индукционные — для преобразования перемещения в изменение взаимной индукции между двумя или более катушками. Принципиальная схема индуктивного преобразователя показана на рис. 1.5, а.
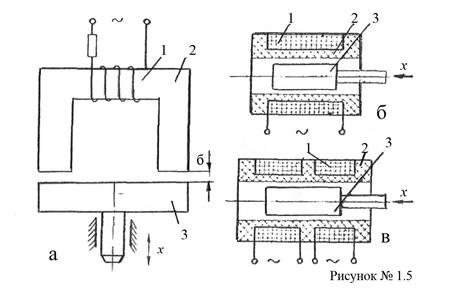
Он представляет собой электромагнитную цепь, состоящую из катушки 1, намотанной на неподвижном сердечнике 2, и подвижного сердечника 3. При изменении положения подвижного сердечника (входная величина) относительно неподвижного меняется магнитное сопротивление воздушных зазоров δ и индуктивность катушки L. Эта зависимость выражается формулой
w- число витков катушки.
R1, 3, Rδ - соответственно магнитное сопротивление стальных участков цепи и зазоров:
R δ =2δ /(μ 0S)
(здесь S площадь зазора, см2; μ 0= 1, 26∙ 10-6 Гн/м— магнитная проницаемость воздушного зазора. Из формул следует, что при прочих неизменных условиях индуктивность зависит только от величины воздушного зазора, т. е., от перемещения подвижного сердечника. На рис. 1.5, б приведен пример выполнения индуктивного, преобразования с одной катушкой, охватывающей перемещающийся внутри нее сердечник 3.
Для увеличения чувствительности применяют преобразователи с двумя катушками (рис. 1.5, в). В среднем положении сердечника сигнал на выходе равен нулю, а при переходе сердечника через среднее положение сигнал меняет фазу на 180°.
В индукционном преобразователе (рис. 1.6, а) имеются две катушки, содержащие wl и w2 витков.
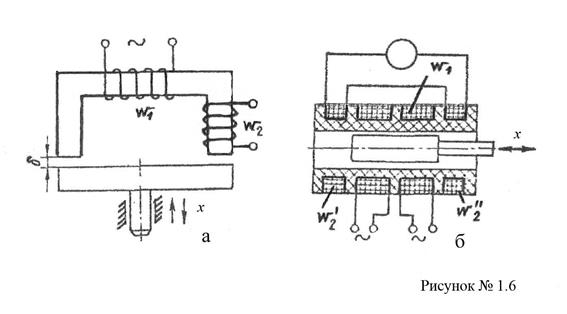
При изменении магнитного сопротивления RM цепи, например, при изменении воздушного зазора, меняется взаимоиндукция М между катушками, которая определяется формулой
Одна из катушек является первичной, питаемой от источника переменного тока с напряжением U1. Во вторичной обмотке наводится э. д. с., которая завиcит от изменения взаимоиндукции катушек М. Таким образом, выходной величиной является напряжение во вторичной обмотке U2, которое равно U2 = M · U1. Такие преобразователи называются также трансформаторными.
На рис. 1.6, б показана разновидность индукционного преобразователя, который называют дифференциально-трансформаторным. В нем имеются первичная питающая катушка и две вторичные w2΄ и w2˝, которые включены дифференциально, т. е. навстречу друг другу, что повышает чувствительность устройства.
Одной из разновидностей индукционных преобразователей является ферродинамический преобразователь угла.
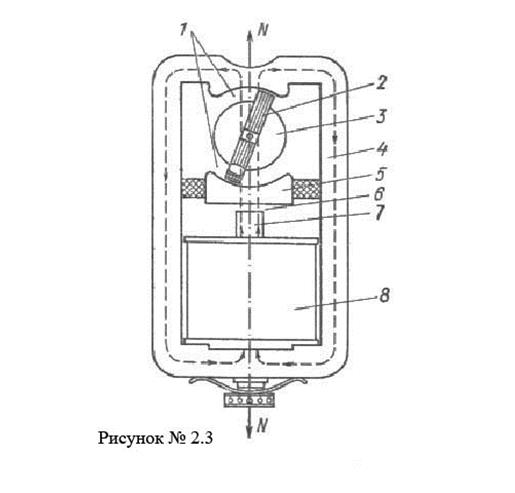
На рис. 2.3 показано устройство серийного трансформаторного (ферродинамического) датчика для измерения угла поворота.
Катушка возбуждения 8 создает переменный магнитный поток, который проходит через магнитопровод 4, полюсный наконечник 5, сердечник 3 и плунжер 7. В рамке 2, помещенной в воздушном зазоре 1 магнитопровода, при этом наводится э. д. с., величина которой зависит от поворота рамки относительно нейтрали NN. Чувствительность датчика может регулироваться путем изменения величины воздушного зазора 6 между плунжером 7 и наконечником 5. Выпускаемые промышленностью подобные датчики типов ПФ-1 — ПФ-6 рассчитаны на питание обмотки возбуждения током промышленной частоты и обеспечивают на выходе напряжение 2 В при пределе измерения 40° (± 20°). Погрешность линейности при этом не превосходит ±0, 4%.