Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Рабочие характеристики двигателей постоянного тока
|
|
Cамостоятельная работа № 16
Тема занятия: «Рабочие и механические характеристики двигателей
постоянного тока»
Учебные вопросы лекции
1. Основные расчетные соотношения в двигателях постоянного
тока.
2. Рабочие характеристики двигателей постоянного тока
3. Механические характеристики двигателей постоянного тока.
4. Регулирование частоты вращения двигателя постоянного тока.
Литература
1. Немцов М.В. Электротехника и электроника: Учебник для вузов. – М.: Высш. шк. 2007, с. 419 – 429.
Основные расчетные соотношения в двигателях постоянного
Тока
Принципиальная электрическая схема двигателя постоянного тока параллельного возбуждения показана на рис.16.1.
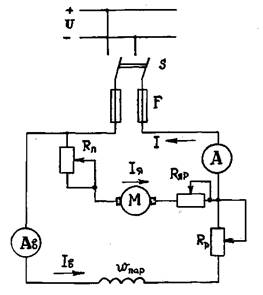
Рисунок 16.1 - Схема двигателя постоянного тока
параллельного возбуждения
Электромагнитный вращающий момент двигателя постоянного тока, возникающий в результате взаимодействия тока в обмотке якоря с магнитным полем полюсов, может быть найден по формуле
 , (16.1)
, (16.1)
где  – постоянная для данной машины величина;
– постоянная для данной машины величина;
p – число пар полюсов;
а – число пар параллельных ветвей обмотки якоря;
N – число активных проводников обмотки якоря;
I я – ток обмотки якоря;
Ф – магнитный поток полюсов машины.
Из формулы (16.1) видно, что для изменения направления вращения двигателя (реверсирования) необходимо изменить знак у вращающего момента, что осуществляется изменением направления тока либо в якорной обмотке (I я), либо в обмотке возбуждения (I в) путем переключения концов обмотки якоря или концов обмотки возбуждения. На практике для осуществления реверсирования чаще применяется переключение концов обмотки якоря.
Вращающий момент, развиваемый двигателем, уравновешивается совокупностью тормозных моментов и нагрузкой. В установившемся режиме работы, когда скорость (частота) вращения постоянна (n=const), вращающий момент двигателя равен статическому моменту нагрузки на его валу
 (16.2)
(16.2)
где M 2 – полезный тормозной момент приводного механизма (момент
нагрузки на валу);
M 0 – момент холостого хода от потерь в самом двигателе (механиче-
ских потерь и потерь в стали).
Если нарушается равенство (16.2), то частота вращения двигателя уменьшается или увеличивается до тех пор, пока момент двигателя не будет уравновешен моментом нагрузки на валу.
При вращении двигателя проводники обмотки якоря пересекают линии магнитной индукции поля полюсов и в них по закону электромагнитной индукции индуктируется ЭДС, величина и направление которой определяется так же, как и у генератора, т.е. она равна:
 (16.3)
(16.3)
где  – постоянный для данной машины коэффициент;
– постоянный для данной машины коэффициент;
n – скорость (частота) вращения, об/мин;
Ф – магнитный поток полюсов двигателя, Вб.
По закону Ленца индуктированная ЭДС E я направлена против тока обмотки якоря I я, а следовательно, против приложенного к зажимам двигателя напряжения U. Поэтому ЭДС якоря двигателя называют противо-ЭДС. Приложенное к зажимам якоря двигателя напряжение должно уравновешивать эту противо-ЭДС E я и падение напряжения в цепи якоря I я R я на сопротивлении обмотки и переходном сопротивлении контактов щеток и коллектора. Тогда основное уравнение для двигателя, работающего с постоянной скоростью (частотой) вращения, можно записать в виде
 (16.4)
(16.4)
Здесь E я- противо-ЭДС, как составляющая приложенного напряжения, уравновешивающая ее величину.
Из уравнения равновесия ЭДС (16.4) и с учетом выражения (16.3), ток, потребляемый двигателем из сети, примерно равный току якоря, что можно записать в виде:
 , (16.5)
, (16.5)
где R я – сопротивление цепи якоря, состоящее из сопротивлений: обмотки
якоря, переходного контакта щетка-коллектор, щеток.
Из формулы (16.5) легко получается выражение для скорости (частоты) вращения двигателя постоянного тока
 (16.6)
(16.6)
Полученная формула дает возможность определить зависимость скорости вращения двигателя от его нагрузки.
Выясним особенности пуска в ход двигателей постоянного тока. При пуске в ход таких двигателей необходимо выполнить два условия: обеспечить требуемый для разгона двигателя пусковой момент и не допустить во время пуска чрезмерно большого тока в цепи якоря I яп, называемого пусковым током. Последний может оказаться недопустимым не только для якорной цепи двигателя, но и для источника питания.
Так как момент, развиваемый двигателем при пуске равен  , то для выполнения первого условия пуска необходимо, чтобы магнитный поток Ф и ток возбуждения I в были максимальными. Следовательно, во время пуска обмотку возбуждения необходимо включить под полное (номинальное) напряжение сети, для чего необходимо вывести, если он имеется, регулировочный реостат в цепи возбуждения. Для обеспечения выполнения второго условия(для уменьшения пускового тока) при включении двигателя в сеть последовательно с цепью якоря включается пусковой реостат R п.
, то для выполнения первого условия пуска необходимо, чтобы магнитный поток Ф и ток возбуждения I в были максимальными. Следовательно, во время пуска обмотку возбуждения необходимо включить под полное (номинальное) напряжение сети, для чего необходимо вывести, если он имеется, регулировочный реостат в цепи возбуждения. Для обеспечения выполнения второго условия(для уменьшения пускового тока) при включении двигателя в сеть последовательно с цепью якоря включается пусковой реостат R п.
Исключение составляют только микродвигатели, которые пускают путем непосредственного включения в сеть (без пускового реостата). При отсутствии пускового реостата R п ток в цепи якоря двигателя в момент включения на напряжение сети U может достигнуть недопустимой величины, в 10-20 раз превосходящей его номинальное значение, потому что частота вращения и противо-ЭДС при этом равны нулю, и величина тока определяется лишь приложенным напряжением и небольшим сопротивлением цепи якоря:
 (16.7)
(16.7)
Большой пусковой ток может повредить коллектор, щетки и даже обмотку якоря. Поэтому во время пуска двигателя, как правило, в цепь якоря включается пусковой реостат R п, ограничивающий пусковой ток до требуемой величины:
 . (16.8)
. (16.8)
Зная величину допустимого пускового тока I яп.доп, можно определить требуемое сопротивление пускового реостата
 . (16.9)
. (16.9)
По мере разгона двигателя под действием пускового момента М п > М ст его частота вращения n и, соответственно, противо-ЭДС якоря E я возрастает, при этом противо-ЭДС, в основном, уравновешивает приложенное напряжение U, и надобность в пусковом реостате отпадает. Поэтому по мере разгона двигателя пусковой реостат R п постепенно выводится. При полностью выведенном пусковом реостате, когда двигатель разогнался до номинальной частоты вращения, ток в цепи якоря определяется по формуле (16.5).
Эксплуатационные свойства двигателя определяются его характеристиками, которые можно подразделить на пусковые, рабочие и регулировочные. Пусковые свойства двигателей определяются следующими величинами:
а) кратность пускового момента, т.е. отношением момента, развиваемого двигателем при пуске М п, к номинальному моменту М н;
б) кратностью пускового тока I яп по отношению к номинальному току I ян;
в) временем пуска t пус;
г) потерями энергии при пуске.
По пусковым характеристикам двигателей выбирают для них пусковую аппаратуру.
Рабочие характеристики двигателей постоянного тока
Рабочие характеристики двигателей параллельного возбуждения выражают зависимости частоты (скорости) вращения n, вращающего момента М и коэффициента полезного действия h от тока якоря I я, изменяющегося вместе с изменением нагрузки на валу (или зависимости тех же величин от полезной мощности на валу двигателя P 2) при постоянном напряжении сети U и неизменном токе возбуждения I в, т.е.

Рабочие характеристики двигателя параллельного возбуждения изображены на рис. 16.2. Они снимаются путем изменения момента нагрузки на валу двигателя, а соответственно изменения тока якоря I я.

Рисунок 16.2 - Рабочие характеристики ДПТ параллельного
возбуждения
Момент, развиваемый двигателем, согласно выражению (16.1) равен:  . При U = const и I в = const магнитный поток двигателя параллельного возбуждения Ф при изменении нагрузки в пределах номинальной практически остается постоянным, поэтому моментная характеристика такого двигателя графически иллюстрируется прямой линией. При значительном увеличении тока (при больших нагрузках на валу двигателя) происходит некоторое отклонение характеристики M = f (I я) от прямолинейной зависимости в сторону оси абсцисс, так как с увеличением тока в якоре все сильнее проявляется размагничивающее действие реакции якоря, уменьшающее основной магнитный поток машины Ф.
. При U = const и I в = const магнитный поток двигателя параллельного возбуждения Ф при изменении нагрузки в пределах номинальной практически остается постоянным, поэтому моментная характеристика такого двигателя графически иллюстрируется прямой линией. При значительном увеличении тока (при больших нагрузках на валу двигателя) происходит некоторое отклонение характеристики M = f (I я) от прямолинейной зависимости в сторону оси абсцисс, так как с увеличением тока в якоре все сильнее проявляется размагничивающее действие реакции якоря, уменьшающее основной магнитный поток машины Ф.
В соответствии с выражением для n (16.6) при U = const и I в = const, при пренебрежении размагничивающим действием реакции якоря зависимость n = f (I я) имеет линейный падающий характер. С увеличением нагрузки на валу двигателя растут: ток в его обмотке якоря, I я R я и размагничивающее действие реакции якоря, уменьшающее основной магнитный поток машины Ф. Обычно влияние падения напряжения преобладает над размагничивающим действием реакции якоря, и поэтому зависимость n = f (I я) представляет падающую характеристику, имеющую сравнительно небольшой наклон к оси абсцисс. Частота вращения при изменении нагрузки в рабочем диапазоне у таких двигателей параллельного возбуждения изменяется всего на 3-10%, поэтому характеристика n = f (I я) называется " жесткой".
Коэффициент полезного действия h равен отношению полезной мощности P 2, развиваемой двигателем на валу, к полной мощности, потребляемой им из сети P 1.
Для двигателя параллельного возбуждения он равен:
 , (16.10)
, (16.10)
где М 2 - полезный вращающий момент на валу двигателя, кГ× м.
При небольших нагрузках, когда потери в меди (переменные потери) малы, КПД с увеличением тока якоря I я быстро возрастает, но затем по мере дальнейшего увеличения нагрузки потери в меди увеличиваются и, когда они становятся равными потерям холостого хода (потерям в стали и механическим потерям), КПД достигает максимума (особенно при токе. I я = (0, 75…1, 0) I ян.) При дальнейшем увеличении нагрузки, когда переменные потери начинают превалировать над потерями постоянными, КПД двигателя уменьшается.
Для двигателей малой мощности КПД находится в пределах h = 0, 75…0, 85, а у средних и крупных двигателей он достигает величины порядка h = 0, 85…0, 94.