Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Ротором называют любое вращающееся тело.
|
|
Роторами являются валы быстроходных двигателей, центрифуги, турбины, шпиндели токарных станков и т.д., скорость вращения которых достигает 20000-50000 об/мин.
Рассмотрим вал, вращающийся в подшипниках A с постоянной угловой скоростью ω. С валом жестко связаны заданные массы m1, m2 и m3 (рис. 7.4), расположение в трех плоскостях Т1, Т2, Т3, перпендикулярных к оси вращения z -z на расстояниях r1, r2 и r3.
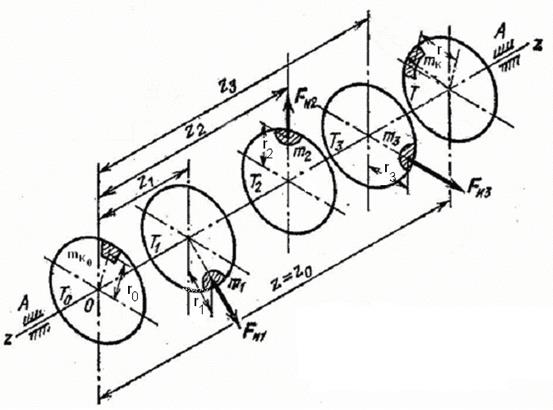
Рис.7.4
Силы инерции, развиваемые этими массами равны:
 ,
,  ,
,  .
.
Результирующая сила инерции всего тела или главный вектор сил инерции равен:
 ,
,
где m - масса всего тела,
rs - расстояние от центра масс всего тела до оси вращения;
 - статический момент.
- статический момент.
Результирующий момент всех сил инерции или главный момент сил инерции равен:
где 
 – центробежный момент инерции относительно оси вращения.
– центробежный момент инерции относительно оси вращения.
Главный вектор сил инерции  и главный момент сил инерции
и главный момент сил инерции  оказывают дополнительное динамическое давление на опоры (подшипники), вызывающее вибрации стойки.
оказывают дополнительное динамическое давление на опоры (подшипники), вызывающее вибрации стойки.
Устранение этого вредного воздействия называют уравновешиваем роторов.
Условиями полного уравновешивания являются
 ,
,  (7.3)
(7.3)
 ,
,  (7.4).
(7.4).
Условие (7.3) называется условием статической уравновешенности и будет выполнено при rs=0, то есть когда центр S масс ротора лежит на оси вращения.
Мерой статической неуравновешенности ротора служит величина статического дисбаланса  .
.
Для устранения статической неуравновешенности ротора необходимо в произвольной плоскости на любом расстоянии от оси вращения расположить одну дополнительную массу (например, в плоскости Т0 на расстоянии r0).
Условие (7.4) называется условием динамической уравновешенности и будет выполнено только в том случае, когда ось вращения совпадает с одной из главных осей инерции ротора.
Мерой динамической неуравновешенности служит величина динамического дисбаланса ротора 
 .
.
Для устранения динамической неуравновешенности ротора необходимо в двух произвольных плоскостях на любом расстоянии от оси вращения расположить две дополнительные массы (например, в плоскостях Т0 и Т на расстоянии r0 и r).
Следовательно, полное уравновешивание ротора может быть достигнуто установкой двух дополнительных масс (противовесов), центры масс которых лежат в двух произвольно выбранных плоскостях.
Рассмотрим пример полного уравновешивания ротора.