Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Теоретичні відомості. Про виконання лабораторної роботи
|
|
ЗВІТ
Про виконання лабораторної роботи
З дисципліни: Суднові вантажні та палубні механізми
Тема роботи: Дослідження канатного поліспаста
Розробив:
Студент групи
Перевірив:
Викладач
м. Херсон 201_ р.
Теоретичні відомості
 На рис. 1.1 – 1.4 показано схеми блоків з перекинутим через них канатами. Роздивляючись ціх механізми без урахування ККД легко виявити що у першому випадку (рис. 1.1) для піднімання вантажу Q необхідне зусилля Q1, що дорівнює Q. Швидкість переміщення (підйому) вантажу рівна швидкості каната намотуваного на барабан вантажнопідйомного механізму. Таким чином така система не надає виграшу ні по силі, ні по швидкості.
На рис. 1.1 – 1.4 показано схеми блоків з перекинутим через них канатами. Роздивляючись ціх механізми без урахування ККД легко виявити що у першому випадку (рис. 1.1) для піднімання вантажу Q необхідне зусилля Q1, що дорівнює Q. Швидкість переміщення (підйому) вантажу рівна швидкості каната намотуваного на барабан вантажнопідйомного механізму. Таким чином така система не надає виграшу ні по силі, ні по швидкості.
Таким чином така система не надає виграшу ні по силі, ні по швидкості.
 В другому випадку (рис. 1.2) за допомогою рухомого блоку підвішений на двох вітках каната, кожен із них навантажений зусиллям Q/2. Для підйому вантажу треба зусилля Q1, рівне вже не Q, а Q/2, а швидкість підйому вантажу буде в два рази менша швидкості каната, намотуваного на барабан, так як для підйому вантажу на висоту h необхідно змотувати канат довжиною 2h зі швидкістю в два рази більше швидкості підйому вантажу.
В другому випадку (рис. 1.2) за допомогою рухомого блоку підвішений на двох вітках каната, кожен із них навантажений зусиллям Q/2. Для підйому вантажу треба зусилля Q1, рівне вже не Q, а Q/2, а швидкість підйому вантажу буде в два рази менша швидкості каната, намотуваного на барабан, так як для підйому вантажу на висоту h необхідно змотувати канат довжиною 2h зі швидкістю в два рази більше швидкості підйому вантажу.
У третьому випадку (рис. 1.3) показано рухомий блок з гідравлічним приводом. Підйомне устаткування складається з циліндра 1, поршня 2, скалки 3, та підвіски з блоком 4. Вода, що потрапляє під тиском в циліндр, переміщує поршень та пов'язаний з ним блок на висоту h.
 При цьому вантаж, як це видно зі схеми, підіймається на висоту 2h. Це устаткування дає виграш у швидкості переміщення вантажу, але отримується програш у силі, оскільки для переміщення вантажу потрібне зусилля, яке дорівнює 2Q.
При цьому вантаж, як це видно зі схеми, підіймається на висоту 2h. Це устаткування дає виграш у швидкості переміщення вантажу, але отримується програш у силі, оскільки для переміщення вантажу потрібне зусилля, яке дорівнює 2Q.
Таким чином, канатно-блочні системи можна поділити наступним чином;
а) нерухомі, які не дають виграшу ні в силі ні в швидкості;
б) рухомі, що дають виграш у силі та програш у швидкості;
в) рухомі, що дають виграш у швидкості та програш у силі.
Такі канатно-блочні системи називають поліспастами.
У механізмах вантажнопідйомних машин найчастіше зустрічаються канатно-блочні системи з виграшем в силі, так як програш у швидкості компенсується швидкохідністю привода.
В поліспастах (як в інших механізмах) існують сили шкідливого опору, наподолання яких необхідно витрачати додаткові зусилля, крім корисного зусилля переміщення вантажу. Силами шкідливого опору є: тертя в підшипниках, тертя каната на поверхні блоків, тертя дротин каната одина об одну, опір каната при згину його навколо блоку або барабану. При цьому опір каната залежить від його конструкції. Жорсткості дротин, числа їх в канаті, типу звивки каната.
Величина ККД рухомих і нерухомих блоків визначається теоретичним шляхом з досвідними виправленнями. Тому, не зупиняючись на їх теоретичному виводі відмітимо, що для практичних розрахунків ККД блоків у середньому приймають:
 для блока на підшипниках кочення;
для блока на підшипниках кочення;
 для блока на підшипниках ковзання.
для блока на підшипниках ковзання.
а)
б)
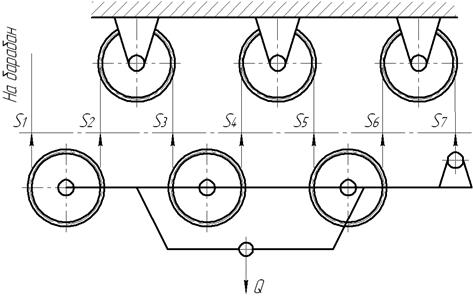
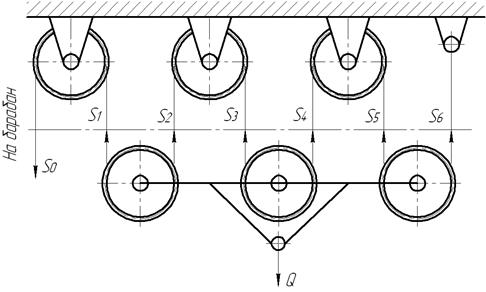
Рисунок 1.4 - Схеми поліспастів
На рис. 1.4, а показана схема поліспаста з блоками, розташованими по горизонталі у вертикальній площині. Підвішений вантаж Q утримується на шести вітках каната по рівнянню:
Q=S1+S2+S3+S4+S5+S6.
У стані спокою підвісного вантажу зусилля у всіх вітках каната вирівнюється, тобто:
 S1=S2=S3=S4=S5=S6= S1спок,
S1=S2=S3=S4=S5=S6= S1спок,
S1спок=  .
.
При русі, в час підйому вантажу, зусилля у вітках каната не будуть однаковими, так як з’являються сили шкідливого опору, на подолання яких необхідно витрачати додаткові зусилля. Очевидно, що зусилля S1 повинно бути більшим за зусилля S2, тобто:
 , або
, або  ,
,
де  ККД, блока
ККД, блока
Відповідно зусилля у вітках каната


тоді:



Тоді ККД поліспаста:

Число віток, на яких підвішено вантаж називається кратністю поліспаста і. На рис. 1.4 а показано шестикратний поліспаст (і = 6), а на рис. 1.4 б – семикратний (і = 7). Кратність поліспаста рівна відношенню числа віток на яких висить вантаж m, до числа віток, які йдуть на барабан k (  ).
).
 В загальному вигляді ККД поліспаста виражається формулою:
В загальному вигляді ККД поліспаста виражається формулою:
 .
.
При підборі каната для поліспаста треба розраховувати на найбільше зусилля, що виникає у вітці, яка навивається на барабан. Для схеми на рис. 1.4 а це зусилля  , для схеми по рис. 1.4 б – зусилля
, для схеми по рис. 1.4 б – зусилля  .
.
Поліспасти за рис. 1.4 нераціональні тим, що блоки займають багато місця в горизонтальному напрямку. Тому блоки поміщають на осях так, так як показано на рис. 1.5. Конструктивний вид такого поліспаста показаний на рис. 1.6.
З метою зменшення довжини змотуваного каната на барабан застосовують здвоєні поліспастиі змотують канат одночасно на два барабана (k = 2). Так, для поліспаста за рис. 1.6, в канат висить на m = 8 вітках, а на барабан ідуть k = 2 вітки, тому для нього кратність  .
.
Між швидкостями підйому вантажу vв та набігання каната на барабан vк існує співвідношення  .
.
