Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Общие сведения. Одним из наиболее распространенных технических устройств, предназначенных для автоматизации измерений контролируемых технологических параметров
|
|
Одним из наиболее распространенных технических устройств, предназначенных для автоматизации измерений контролируемых технологических параметров, является электронный мост.
Электронные мосты - это приборы, работающие с различными датчиками, в которых измеряемый технологический параметр преобразуется в изменение электрического сопротивления, наиболее широко электронные мосты применяются в качестве вторичных приборов при работе с термометрами сопротивления.
Автоматический электронный уравновешенный мост КПМ1 предназначен для непрерывного измерения и записи температуры при работе в комплекте с термометром сопротивления.
Измерительная схема равновесного моста (рис.3.1.) включает четыре плеча, три из которых представлены постоянными сопротивлениями R1, R2, R3, а четвертое - последовательно соединенными переменными сопротивлениями: термометра сопротивления  постоянным сопротивлением
постоянным сопротивлением  , и общим сопротивлением реохорда
, и общим сопротивлением реохорда  . Последнее состоит из трех параллельно соединенных сопротивлений: реохорда (калиброванного сопротивления); шунта реохорда
. Последнее состоит из трех параллельно соединенных сопротивлений: реохорда (калиброванного сопротивления); шунта реохорда  , предназначенного для ограничения протекающего по реохорду тока; сопротивления
, предназначенного для ограничения протекающего по реохорду тока; сопротивления  , служащего для подгонки сопротивлений реохорда к расчетному значению. Точки в и d измерительной схемы подсоединяются ко входу электронного усилителя ЭУ.
, служащего для подгонки сопротивлений реохорда к расчетному значению. Точки в и d измерительной схемы подсоединяются ко входу электронного усилителя ЭУ.
Если температура среды, в которую помещен термометр сопротивления, неизменна то мостовая схема находится в равновесии, разность потенциалов в точках в, d равна нулю, и напряжение на входе электронного усилителя отсутствует. Движок реохорда  в этом случае неподвижен, а стрелка прибора показывает измеряемое значение температуры, пропорциональное величине сопротивления термометра
в этом случае неподвижен, а стрелка прибора показывает измеряемое значение температуры, пропорциональное величине сопротивления термометра  .
.
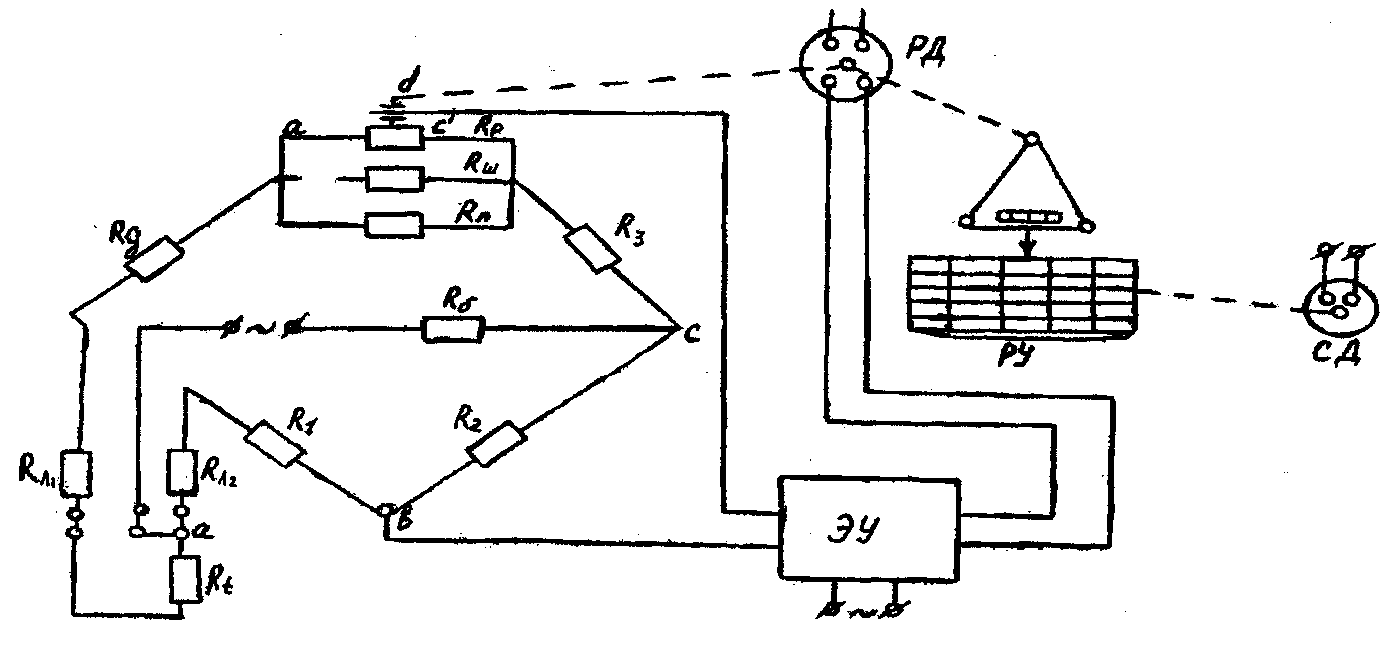
| . Рис. 3.1. Принципиальная схема автоматического электронного уравновешенного моста КПМ1 Rt – термометр сопротивления; ЭУ – электронный усилитель; РД – реверсивный двигатель; РУ – регистрирующее устройство; СД – синхронный двигатель. |
В случае изменения температуры среды изменяется величина электрического сопротивления термометра . При этом измерительный мост будет разбалансирован, а в диагонали моста между точками в и d появится напряжение небаланса. Последнее подается на вход электронного усилителя ЭУ, где усиливается по напряжению и мощности, затем поступает на реверсивный двигатель РД и приводит в движение его ротор.
Вращаясь в ту или иную сторону, в зависимости от знака небаланса, ротор двигателя перемещает механически с ним связанные движок реохорда Rp, стрелку и перо до тех пор, пока измерительный мост не придет в состояние равновесия. Напряжение на входе электронного усилителя ЗУ в этом случае станет равным 0, ротор двигателя прекратит вращение, а прибор покажет измеряемую температуру. На точность показаний прибора влияет тщательность подгонки сопротивлений проводов, соединяющих термометр сопротивления с автоматическим равновесным мостом. Для подгонки сопротивлений соединительных проводов служат сопротивления Rл1 и Rл2. Сопротивление каждого провода, идущего от термометра к прибору, принято 2, 5+0, 01 Ом. Если сопротивление провода меньше 2, 5 Ом, то в соединительную линию последовательно включается добавочное сопротивление, дополняющее сопротивление провода до 2, 5 Ом.
При колебании температуры окружающей среды величина сопротивления соединительных проводов будет меняться. Для устранения влияния изменения сопротивления соединительных проводов на показания прибора применяется трехпроходная схема включения термометра сопротивления. При такой схеме включения (см. рис.3.1.) соединительные провода оказываются включенными, в противоположные плечи моста. Изменение сопротивления проводов меняет величину сопротивления обоих плеч и не влияет на равновесие моста.
В случае необходимости можно изменять пределы измерения имеющегося моста, выполнив заново расчет измерительной схемы. Для расчета измерительной схемы уравновешенного моста должны быть заданы минимальная и максимальная измеряемые температуры в °С и тип термометра сопротивления.
Зная пределы измерения и тип термометра сопротивления, находим по градуировочным таблицам 3.1. и 3.2. минимальную Rmin, и максимальную Rtmax величины сопротивления термометра.
При измерении Rtmin движок реохорда должен находиться в точке c, соответствующей началу шкалы. В этом случае условие равновесия моста можно записать в виде:
(Rtmin + Rл1 + Rд + Rоб) · R2 = (R1 + Rл2) · R3 (1)
При измерении Rtmax движок должен находиться в точке а, соответствующей концу шкалы.
При этом равновесие моста соблюдается в случае выполнения следующего уровнения:
(Rtmax + Rл1 + Rд) · R2 = (R1 + Rл2) · (R3 + Rоб) (2)
Путем совместного решения (1) и (2) получаем:
 (3)
(3)
Таблица 3.1
Градуировочная таблица для платиновых термометров сопротивления Гр.21 (11 а) (R0 = 46 Ом)
| °C | Сопротив-ление, Ом | °C | Сопротив-ление, Ом | °C | Сопротив-ление, Ом |
| -120 | 23, 75 | 62, 13 | 98, 07 | ||
| -110 | 25, 64 | 63, 89 | 99, 72 | ||
| -100 | 27, 53 | 65, 65 | 101, 37 | ||
| -90 | 29, 41 | 67, 41 | 103, 01 | ||
| -80 | 31, 28 | 69, 16 | 104, 64 | ||
| -70 | 33, 14 | 70, 90 | 106, 27 | ||
| -60 | 35, 00 | 72, 64 | 107, 90 | ||
| -50 | 36, 85 | 74, 37 | 109, 53 | ||
| -40 | 38, 69 | 76, 10 | 111, 13 | ||
| -30 | 40, 53 | 77, 82 | 112, 74 | ||
| -20 | 42, 36 | 79, 54 | 115, 94 | ||
| -10 | 44, 18 | 81, 25 | 117, 54 | ||
| 46, 00 | 82, 96 | 119, 13 | |||
| 47, 81 | 84, 66 | 120, 71 | |||
| 49, 62 | 86, 35 | 122, 28 | |||
| 51, 42 | 88, 04 | 123, 86 | |||
| 53, 22 | 89, 73 | 125, 42 | |||
| 55, 01 | 91, 40 | 126, 96 | |||
| 56, 80 | 93, 80 | 128, 54 | |||
| 58, 58 | 94, 75 | 130, 09 | |||
| 60, 36 | 96, 41 |
Таблица 3.2
Градуировочная таблица для медных термометров сопротивления
Гр.23 (R0 = 53 Ом)
| °C | Сопротивление, Ом | °C | Сопротивление, Ом | °C | Сопротивление, Ом |
| -50 | 41, 71 | 59, 77 | 77, 84 | ||
| -45 | 42, 84 | 60, 90 | 78, 97 | ||
| -40 | 43, 97 | 62, 03 | 80, 09 | ||
| -35 | 45, 10 | 63, 16 | 81, 22 | ||
| -30 | 46, 23 | 64, 29 | 82, 35 | ||
| -25 | 47, 36 | 65, 42 | 83, 48 | ||
| -20 | 48, 48 | 66, 55 | 84, 61 | ||
| -15 | 49, 61 | 67, 68 | 85, 74 | ||
| -10 | 50, 74 | 68, 81 | 86, 87 | ||
| -5 | 51, 87 | 69, 93 | 88, 00 | ||
| 53, 00 | 71, 06 | 89, 13 | |||
| 54, 13 | 72, 19 | 90, 25 | |||
| 55, 26 | 73, 32 | 91, 38 | |||
| 56, 39 | 74, 45 | 92, 51 | |||
| 57, 52 | 75, 58 | 93, 64 | |||
| 58, 65 | 76, 71 |
Для увеличения чувствительности измерительной схемы сопротивления R3 выбирается равным сопротивлению R2.
Учитывая это, из (1) имеем:
R1= Rtmin + Rд + Rоб (4)
Подставляя (3) в (4), получим:
R12 + pR1 + q = 0 (5)
Где p = Rл2 + R2 – Rtmin – Rд,
q = - [Rл2 (Rtmin + Rд) + R2 (Rtmax + Rд)]
Из (5), (4) последовательно определяют значения сопротивлений R1 и Rоб. Обозначив общие сопротивления параллельно соединенных сопротивлений Rp и Rш, через Rпр, величину сопротивления Rп, находят по формуле:
Rп = 
Для рассматриваемой нами схемы моста КПМ1 Rпр = 90 Ом. Максимальная величина тока, протекающего через сопротивления, определяется по формуле:
Imax =  , U = 6, 3 В
, U = 6, 3 В
Величина Imax не должна превышать 7-8 мА. Такое ограничение тока связано с необходимостью предотвращения нагрева термометра.