Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Уравнение движения электропривода, ввод т анализ.
|
|
Когда момент, развиваемый двигателем, равен моменту сопротивления исполнительного органа, скорость привода постоянна.
Однако во многих случаях привод ускоряется или замедляется, т.е. работает в переходном режиме.
Переходным режимом электропривода называют режим работы при переходе от одного установившегося состояния к другому, когда изменяются скорость, момент и ток.
Причинами возникновения переходных режимов в электроприводах является изменение нагрузки, связанное с производственным процессом, либо воздействие на электропривод при управлении им, т.е. пуск, торможение, изменение направления вращения и т.п., а также нарушение работы системы электроснабжения.
Уравнение движения электропривода должно учитывать все моменты, действующие в переходных режимах.
В общем виде уравнение движения электропривода может быть записано следующим образом [1]:
 . (2.9)
. (2.9)
При положительной скорости уравнение движения электропривода имеет вид
 . (2.10)
. (2.10)
Уравнение (2.10) показывает, что развиваемый двигателем вращающий момент  уравновешивается моментом сопротивления
уравновешивается моментом сопротивления  и динамическим моментом
и динамическим моментом  . В уравнениях (2.9) и (2.10) принято, что момент инерции привода
. В уравнениях (2.9) и (2.10) принято, что момент инерции привода  является постоянным, что справедливо для значительного числа исполнительных органов.
является постоянным, что справедливо для значительного числа исполнительных органов.
Из анализа уравнения (2.10) видно:
1) при >  ,
,  , т.е. имеет место ускорение привода;
, т.е. имеет место ускорение привода;
2) при <  ,
,  , т.е. имеет место замедление привода (очевидно, замедление привода может быть и при отрицательном значении момента двигателя);
, т.е. имеет место замедление привода (очевидно, замедление привода может быть и при отрицательном значении момента двигателя);
3) при =  ,
,  ; в данном случае привод работает в установившемся режиме.
; в данном случае привод работает в установившемся режиме.
Динамический момент (правая часть уравнения моментов) проявляется только во время переходных режимов, когда изменяется скорость привода. При ускорении привода этот момент направлен против движения, а при торможении он поддерживает движение.
3.Понятие о статической устойчивости работы привода.
Под статической устойчивостью, вообще говоря, понимают способность системы самостоятельно восстановить исходный режим работы при малом возмущении. Статическая устойчивость является необходимым условием существования установившегося режима работы системы, но отнюдь не предопределяет способности системы продолжать работу при резких нарушениях режима, например при коротких замыканиях.
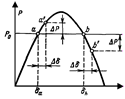
Рис3.1 – Изменение мощности при приращениях угла.
Итак, точка а и, любая другая точка на возрастающей части синусоидальной характеристики мощности отвечают статически устойчивым режимам и, наоборот, все точки падающей части характеристики — статически неустойчивым. Отсюда вытекает следующий формальный признак статической устойчивости рассмотренной простейшей системы: приращения угла  и мощности генератора Р должны иметь один и тот же знак, т. е.
и мощности генератора Р должны иметь один и тот же знак, т. е.  или, переходя к пределу:
или, переходя к пределу:

| (3.1) |
Производная  , как известно, носит название синхронизирующей мощности, и, следовательно, критерием статической устойчивости системы в рассмотренных условиях является положительный знак синхронизирующей мощности. Производная мощности по углу согласно (2.1) равна:
, как известно, носит название синхронизирующей мощности, и, следовательно, критерием статической устойчивости системы в рассмотренных условиях является положительный знак синхронизирующей мощности. Производная мощности по углу согласно (2.1) равна:

| (3.2) |
Она положительна при  < 90° (рис. 3.3). В этой области и возможны устойчивые установившиеся режимы работы системы. Критическим с точки зрения устойчивости в рассматриваемых условиях (при чисто индуктивной связи генератора с шинами приемной системы) является значение угла
< 90° (рис. 3.3). В этой области и возможны устойчивые установившиеся режимы работы системы. Критическим с точки зрения устойчивости в рассматриваемых условиях (при чисто индуктивной связи генератора с шинами приемной системы) является значение угла  = 90°, когда достигается максимум характеристики мощности.
= 90°, когда достигается максимум характеристики мощности.
Метод малых отклонений, или малых колебаний широко используется при анализе устойчивости системы.
Следует отметить, что причиной нарушения статической устойчивости может быть работа автоматики при ошибке в установке регулировочных коэффициентов или выходе режима за пределы зоны устойчивости.