Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Искусственные электромеханические и механические характеристики двигателей постоянного тока независимого возбуждения при изменении сопротивления цепи якоря
|
|
Искусственные характеристики, полученные путем введения добавочных резисторов в цепь якоря, называются реостатными характеристиками двигателя. Схема включения резистора для получения реостатных характеристик представлена на рис.3.5, а. При этом суммарное сопротивление якорной цепи увеличивается:

Соответственно ограничивается ток короткого замыкания

и уменьшается модуль жесткости статической механической характеристики

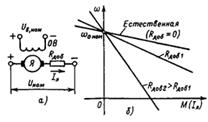

Скорость идеального холостого хода остается неизменной w0=w0.ном, а между током и моментом, если не учитывать реакцию якоря, сохраняется пропорциональность М=с·Iя, поэтому механические и электромеханические реостатные характеристики двигателя отличаются друг от друга только масштабом по оси абсцисс.
Семейство механических и электромеханических характеристик двигателя для ряда значений Rдоб представлено на рис.3.5, б. Введение резисторов в цепь якоря двигателя является простейшим средством ограничения тока при различных переходных процессах и используется для этой цели во всех случаях при питании двигателя от сети.
Увеличение сопротивления якорной цепи RяS из-за введения добавочных сопротивлений Rдоб уменьшает жесткость механических характеристик в режиме динамического торможения так же, как и в двигательном режиме. Аналогично изменяется модуль жесткости механических характеристик динамического торможения и при ослаблении поля двигателя. Механические характеристики, соответствующие различным Rдоб, представлены на рис.3.8 б
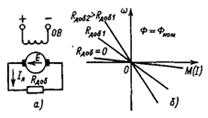
Рис. 3.8