Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Методы обработки сигнала
|
|
В данном дипломе, разрабатывается импульсный следящий уровнемер, который обладает сигналом со сверхкороткими импульсами (СКИ). Длительность импульса такого сигнала составляет примерно 1 нс, что соответствует полосе частот 1ГГц, несущая частота при этом равна 10ГГц. Сигнал с таким параметрами является узкополосным, а называют их сигналами со сверхвысоким разрешением.
Для их более удобного и точного измерения СКИ используется метод стробоскопической обработки сигнала. Применение СКИ сигналов требует кардинально нового подхода к функциональному построению, техническим, технологическим и методическим решениям критических узлов систем. Революционные достижения последних лет в технологическом комплексе создания устройств генерации, излучения, приёма и обработки сигналов на основе передовых методов и решений дают возможности практической реализации систем с СКИ сигналами, что ранее было достижимо лишь в отдельных лабораторных и экспериментальных образцах. Появились следующие технологии, базовые для СКИ радиоэлектроники:
– технологии генерации сверхкоротких (длительностью 1 нс и короче) импульсов с практически неограниченным ресурсом с высокой стабильностью и большой частотой повторения;
– технологии излучения таких импульсов непосредственно в пространство (антенная техника);
– технологии скоростной цифровой обработки больших массивов информации (вычислительная техника) [2].
В этом плане применение в радиолокации СКИ сигналов выливается в самостоятельное научно-техническое направление с собственными методами теоретического анализа и нетрадиционными схемотехническими решениями.
Развитие систем на основе СКИ сигналов до недавнего времени во многом сдерживалось недоступностью специализированной элементной базы. Построение такой системы на микросхемах широкого применения и дискретных элементах представляет собой сложную инженерную задачу и часто приводит к образцам с неприемлемыми техническими параметрами и высокой стоимостью. Несмотря на отдельные успехи некоторых разработчиков в создании подобных систем, они не достигли стадии серийного производства и не представлены на широком рынке. В данный момент на мировом рынке уже имеются специализированные интегральные микросхемы, в частности однокристальные приемопередатчики СКИ сигналов, которые позволяют создавать конкурентоспособные СКИ системы с требуемыми характеристиками [18].
В настоящее время ОАО «Конструкторское бюро опытных работ» (г. Москва) совместно с кафедрой «Автономные информационные управляющие системы» МГТУ им. Н.Э. Баумана проводятся разработки по созданию и изучению методов стробоскопической обработки сигналов базирующейся на однокристальном приемопередатчике без применения высокоскоростных АЦП. Передающий тракт микросхемы включает управляемый генератор импульсов длительностью в сотни пикосекунд с частотами повторения от 1 МГц до 100 МГц. Приёмный тракт включает малошумящий усилитель, компаратор с перестраиваемым порогом, дискретизатор на основе массива линий задержки и набор цифровых счетчиков. С выхода микросхемы цифровой сигнал поступает в микроконтроллер и сигнальный процессор для дальнейшей обработки [20].
Базовый приемо-передающий модуль импульсного уровнемера «Пикор-1» и показан на рисунке 3.21.
Ключевой особенностью данного приемо-передающего модуля является его малое энергопотребление по сравнению с аналогами. Так, приемо-передающий модуль PulsON 400 MRM (производство Time Domain, США), использующий СКИ сигналы с заполнением несущей и мощные АЦП и ПЛИС для преобразования сигналов из аналоговой формы в цифровую и управления их параметрами, потребляет порядка 5 Вт мощности, а потребляемая мощность приёмо – передающего модуля (ППМ) «Пикор – 1» менее 150 мВт [9]. Данное преимущество позволяет использовать модуль в автономной мобильной радиоэлектронной аппаратуре.

Рисунок 3.21 – Базовый приемо-передающий модуль Пикор-1
Основными задачами, стоящими перед разработчиками являются задачи приема и обработки СКИ. Одним из наиболее популярных способов является стробоскопический метод приема сверхширокополосных сигналов.
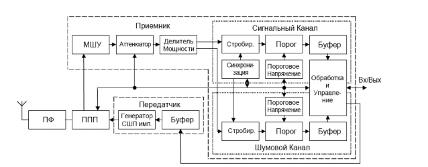
Рисунок 3.23 – Стробоскопический приемо-передатчик
В стробоскопическом приемнике осуществляется регистрация не самого исследуемого сигнала, а его отдельных выборок, каждая из которых формируется в различные периоды повторения данного сигнала.
Использование сигналов со сверхкороткими импульсами эффективно при анализе отражающих свойств пространственно-распределенных объектов. Обработка подобных сигналов требует реализации устройств, обладающих высокой чувствительностью, что зачастую выходит за пределами технических возможностей. При наличии периодичности в последовательности сигналов, их цифровую обработку можно осуществлять стробоскопическими методами.
Математическая модель стробоскопической обработки представлена на рисунке 3.24 и содержит перемножитель и узкополосный линейный фильтр (Ф), настроенный на разностную частоту несущих зондирующего x (t) и стробирующего s(t) радиосигналов:
 (3.15)
(3.15)
 (3.16)
(3.16)
где  (t),
(t),  (t) – комплексные огибающие,
(t) – комплексные огибающие,  - низкая промежуточная частота (обычно несколько кГц), T – период повторения зондирующего сигнала, T = T + Д T – период стробирования, Д T = T/N – шаг считывания.
- низкая промежуточная частота (обычно несколько кГц), T – период повторения зондирующего сигнала, T = T + Д T – период стробирования, Д T = T/N – шаг считывания.
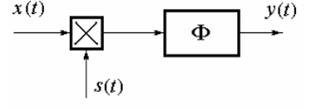
Рисунок 3.24 – Модель стробоскопической обработки
Относительное смещение стробирующего радиоимпульса k Д T = k ( / N внутри k -го периода зондирования обеспечивается схемой автосдвига (рисунок 2) и определяется требуемой величиной трансформации спектра.
/ N внутри k -го периода зондирования обеспечивается схемой автосдвига (рисунок 2) и определяется требуемой величиной трансформации спектра.
Вид спектра G (w) последовательности стробоскопических выборок в низкочастотной области при  < р/ T показан на рисунке 3.25.
< р/ T показан на рисунке 3.25.
Для усиления и регистрации может быть использована любая из спектральных составляющих. Однако наибольший интерес представляет фильтрация сигнала на частоте , так как при этом частота настройки узкополосного фильтра не зависит от периода повторения сигнала T.
Рисунок 3.25 – Вид спектра стробоскопических выборок на входе фильтра
При этом выходной сигнал стробоскопического преобразователя асимптотически (при N → ∞) описывается соотношением:
 (3.17)
(3.17)
и в случае короткого строба ( < <
< <  ) повторяет входной сигнал, растянутый во времени в N раз на несущей частоте:
) повторяет входной сигнал, растянутый во времени в N раз на несущей частоте:
 /N)
/N)  ] (3.18)
] (3.18)
Величина  пропорциональна площади огибающей стробирующего радиоимпульса; коэффициент передачи преобразователя составляет
пропорциональна площади огибающей стробирующего радиоимпульса; коэффициент передачи преобразователя составляет  2T и определяется крутизной характеристики смесителя, величиной стробирующих радиоимпульсов и периодом следования сигнала. Трансформированная огибающая A (t/N) может быть выделена амплитудным детектором, а фазовая структура
2T и определяется крутизной характеристики смесителя, величиной стробирующих радиоимпульсов и периодом следования сигнала. Трансформированная огибающая A (t/N) может быть выделена амплитудным детектором, а фазовая структура  (t/N)=arg A (t/N) A – низкочастотным фазометром (в качестве опорного сигнала необходимо использовать колебания с частотой ) [19].
(t/N)=arg A (t/N) A – низкочастотным фазометром (в качестве опорного сигнала необходимо использовать колебания с частотой ) [19].
При использовании схемы радиоимпульсного стробирования в ближней радиолокации, элемент разрешения по дальности РЛС будет определяться корреляционными свойствами используемых сигналов (1), в то время как полоса частот выходного сигнала (3) может быть сужена до любой требуемой величины соответствующим выбором коэффициента спектральной трансформации N. Это позволяет эффективно селектировать объекты по скорости: сжатый по спектру сигнал может быть использован для разрешения близких малоподвижных целей при спектральном анализе, поскольку доплеровские сдвиги несущей частоты трансформации не подвергаются.
Рисунок 3.26 – Сигналы на выходе каналов дальности (a) и скорости (б) стробоскопической РЛС
Так, например, при несущей частоте 10 ГГц и длительности зондирующего импульса ~ 3 нс для коэффициента спектральной трансформации N~  элементы разрешения по дальности и скорости составляют ~0.5 м и ~1 м/с соответственно.
элементы разрешения по дальности и скорости составляют ~0.5 м и ~1 м/с соответственно.
На рисунок 3.26 приведены выходные сигналы каналов дальности (a) и скорости (б) стробоскопической системы обработки при наличии двух целей в пространстве обзора стробоскопической РЛС с различными доплеровскими сдвигами несущей частоты.
Следует отметить, что для сигнала (3) на выходе схемы радиоимпульсного стробирования задержка зондирующего сигнала на ф приведёт к изменению выходного сигнала на выходе преобразователя:
 (3.19)
(3.19)
При этом функция неопределенности для стробоскопически преобразованного узкополосного сигнала может быть представлена соотношением:
 (3.20)
(3.20)
а ее объем, ограниченный квадратом модуля этой функции, составит:
 (3.21)
(3.21)
Отмеченное обстоятельство является следствием вытеснения значительной части объёма за пределы указанной области, в которой возможно использование стробоскопической обработки сигналов.
Таким образом, стробоскопическая обработка радиосигналов позволяет сочетать высокое разрешение по дальности  м и менее) с возможностью селекции по скорости малоподвижных объектов (V=10–50 км/час), что предполагает ее эффективное использование в системах ближней локации при зондировании малоподвижных объектов. При стробоскопической обработке следящий принцип измерения изменяется. При обработке имеются отдельные отсчёты импульса с растянутым временным масштабом [18].
м и менее) с возможностью селекции по скорости малоподвижных объектов (V=10–50 км/час), что предполагает ее эффективное использование в системах ближней локации при зондировании малоподвижных объектов. При стробоскопической обработке следящий принцип измерения изменяется. При обработке имеются отдельные отсчёты импульса с растянутым временным масштабом [18].
На основе стробоскопического метода обработки сигнала можно выделить три метода измерения времени задержки импульсов:
1) метод максимума;
2) оптимальный алгоритм измерения времени задержки;
3) метод параболической аппроксимации.
Два последних метода основаны на обработке простейших импульсных сигналов с заданным законом амплитудной модуляции  и неизвестным параметром
и неизвестным параметром  (
( =ф), определяющим временное положение пачки импульсов, так как именно такой вид имеют растянутые импулься после стробоскопической обработки. При этом задача точного измерения параметра имеет смысл при условии, что предварительно выполнена операция поиска и селекции импульсов, передающих амплитудную информацию, так что полезный сигнал представляет собой дискретную функцию вида:
=ф), определяющим временное положение пачки импульсов, так как именно такой вид имеют растянутые импулься после стробоскопической обработки. При этом задача точного измерения параметра имеет смысл при условии, что предварительно выполнена операция поиска и селекции импульсов, передающих амплитудную информацию, так что полезный сигнал представляет собой дискретную функцию вида:
 , (3.22)
, (3.22)
где д – функция используется для описания периодической последовательности импульсов с известным временным положением, форма которых не играет роли с точки зрения дальнейшей обработки сигнала. Так как вся информация заложена только в амплитудах импульсов.
Выражение для первого алгоритма обработки принимаемой реализации имеет вид [7]:
 |ф=
|ф=  , (3.23)
, (3.23)
где  – выборочные значения реализации
– выборочные значения реализации  в дискретные моменты времени, соответствующие известным моментам прихода сигнальных импульсов;
в дискретные моменты времени, соответствующие известным моментам прихода сигнальных импульсов;  – весовые коэффициенты, вычисляемые заранее для дискретных значений параметра
– весовые коэффициенты, вычисляемые заранее для дискретных значений параметра  .
.
Рисунок 3.26 – Временные диаграммы, поясняющие определение весовых коэффициентов  в оптимальном алгоритме дискриминирования:
в оптимальном алгоритме дискриминирования:
а)  б)
б)  в)
в) 
Для упрощения аппаратной реализации устройства дискриминирования удобно принять интервал дискретизации параметра равным периоду повторения импульсов Ти, так как из аналитического определения коэффициентов  в (3.10) следует, что
в (3.10) следует, что  и алгоритм (3.23) в этом случае можно записать в виде:
и алгоритм (3.23) в этом случае можно записать в виде:
 , (3.24)
, (3.24)
Таким образом, оптимальный алгоритм дискриминирования в устройствах измерения временного положения пачки импульсных сигналов сводится к весовому суммированию выборочных значений сигнала  [7].
[7].
Второй алгоитм заключается в нахождении в массиве дискретных отсчётов растянутого импульса положения максимального отсчёта. Затем в качестве вспомогательных точек берём два соседних отсчёта. Далее проводим параболическую аппроксимацию формы огибающей полученных отсчётов в окрестности максимального отсчёта. Для этого задаёмся уравнением параболы  и по нему записываем уравнение для каждого выбранного отсчёта. В итоге получаем систему линейных уравнений относительно неизвестных коэффициентов
и по нему записываем уравнение для каждого выбранного отсчёта. В итоге получаем систему линейных уравнений относительно неизвестных коэффициентов  ,
,  и
и  :
:
Решим и найдём нужные нам значения коэффициентов. Затем найдём положение экстремума аппроксимирующей параболы:

Третий метод является оптимальным методом обработки, и поэтому стоит ожидать, что он даст хорошую точность и помехоустойчивость. Однако он гораздо сложнее в реализации и требует большего времени для обработки сигнала. Далее рассмотрим возможности использования обоих этих методов, так как они реализуются на основе микропроцессора в программной форме.