Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Структура микропроцессорных систем управления бытовой техники
|
|
Объекты управления (ОУ) бытовой техники по своему назначению делятся на два класса.
К первому классу относятся хорошо известные объекты, предназначенные для использования в домашних условиях: телевизоры, видеомагнитофоны и другие устройства бытовой радиоэлектронной аппаратуры (БРЭА), а также холодильники, стиральные машины, кухонные комбайны и др.
Ко второму классу относятся объекты, предназначенные для оказания услуг населению в производственных условиях: промышленные стиральные машины, машины химической чистки одежды, станочное оборудование предприятий по ремонту и изготовлению мебели по заказам населения.
Системы управления объектами первого класса строятся на базе одного управляющего устройства, соединенного с объектом управления несколькими каналами связи.
Обобщенная структура такой системы управления показана на рисунке 1.
В качестве управляющего устройства системы может использоваться микропроцессорный контроллер (МК), построенный на базе микропроцессора определенного типа. Информация о состоянии объекта управления передается в микропроцессорный контроллер через блок нормирующих преобразователей (БНП), коммутатор (К) и аналого-цифровой преобразователь (АЦП). Нормирующие преобразователи используются в системе для согласования уровней информационных сигналов на выходе объекта управления с уровнями входных сигналов коммутатора. Аналого-цифровой преобразователь служит для преобразования аналоговых сигналов с выхода объекта в цифровой код. После преобразования цифровой информации о состоянии объекта управления по определенному алгоритму, обычно содержащемуся в памяти МК, вырабатываются управляющие воздействия, которые поступают на вход объекта управления через цифро-аналоговый преобразователь (ЦАП) и исполнительное устройство (ИУ). Заметим, что если мультиплексирование входных сигналов ОУ на входе АЦП возможно практически всегда, то мультиплексирование управляющих сигналов на входе МК часто недопустимо. Такая структура управляющей системы объясняется необходимостью запоминания каждого значения управляющего сигнала после остановки вычислительного устройства.
Рисунок 1 – Структура микропроцессорной системы управления с одним объектом управления
Следует заметить, что среди выходных сигналов бытовых объектов управления аналогового типа могут быть и дискретные сигналы. Ввод таких сигналов в МК осуществляется через блок формирования дискретных сигнала (БФДС), назначение которого — согласовать их уровни и мощности с входными цепями МК. При наличии нескольких дискретных сигналов для их ввода в МК можно использовать мультиплексирование. При наличии на входе объекта управления исполнительного устройства дискретного типа (ИУД) (усилители мощности, тиристорные преобразователи, работающие в ключевом режиме) управляющее воздействие формируется в МК и подается в ИУД без использования ЦАП.
Система управления может решать различные задачи:
- поддержание на определенном уровне или изменение по определенному закону выходных параметров объекта управления;
- программное изменение выходных параметров объекта и отслеживание их изменений в соответствии с некоторыми внешними сигналами;
- включение или выключение потока энергии в объекты управления по времени или по заданному амплитудному значению контролируемое параметра;
- сбор информации о состоянии объекта управления и ее обработка с сохранением результатов обработки в устройствах памяти.
Центральное место в рассматриваемой системе занимает микроконтроллер, а остальные элементы — БНП, ЦАП и ИУ — обеспечивают связь МК с объектом управления. Конструктивно все элементы системы могут располагаться на одной плате, которая размещается в конструктиве объекта управления. Управляющий контроллер может быть выполнен на базе определенного типа микроконтроллера и нескольких микросхем подкрепления.
Для снижения затрат на систему управления объектами бытового назначения возможно использование одного универсального комплекта МК и УС, которые при необходимости могут быть подключены к любому из объектов. Такой подход к автоматизации бытовой техники особенно целесообразен, когда потребитель является обладателем бытовой ПЭВМ. Небольшим набором средств сопряжения с объектом можно обеспечить в этом случае решение многих бытовых задач, поручив управляющей ПЭВМ контроль и управление различными бытовыми процессами человека.
Объекты управления второго класса обычно объединяются в группы, которые составляют технологическую линию. Системы управления объектами этого класса могут строиться по тому же принципу, составляя совокупность одноконтурных систем управления данного уровня (рисунок 2). В этом случае каждая локальная система управления одним из объектов работает независимо от других систем. При необходимости информация о состоянии объектов может быть передана в центральное вычислительное устройство для решения некоторых общих для группы объектов управляющих задач.
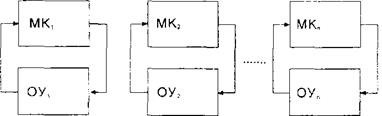
Рисунок 2 – Структура микропроцессорной системы управления группой объектов управления
Те же задачи управления можно решить и с использованием центрального МК, управляющего всей группой объектов (рисунок 3). В каждой из этих систем есть свои достоинства и недостатки. В распределенной системе управления (рисунок 2) используются несколько контроллеров (по числу каналов управления). Очевидно, что стоимость такой системы будет больше, но ее надежность гораздо выше, ибо выход из строя одного МК мало отразится на технологическом процессе в целом.
Затраты на систему управления с центральным МК (рисунок 3) меньше, но ее надежность тоже ниже, так как в основном она определяется надежностью центрального МК.
Конечный выбор принципа управления проектируемых микропроцессорных систем зависит от многих взаимосвязанных факторов, важнейшими из которых являются стоимость, надежность, гибкость, способность работать в реальном масштабе времени.
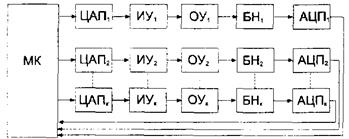
Рисунок3 – Структура микропроцессорной системы управления группой объектов управления с центральным контроллером
Для бытовой техники первые два показателя – стоимость и надежность – часто оказываются определяющими факторами. В большой степени эти показатели обеспечиваются применением в управляющих устройствах микроконтроллеров.