Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Задача Д1
|
|
Механическая система (рис. Д1.0 – Д1.9) состоит из грузов 1 и 2, цилиндрического сплошного однородного катка 3 и ступенчатых шкивов 4 и 5 с радиусами ступеней  м,
м,  м,
м,  м и
м и  м. Массу шкивов считать равномерно распределенной по внешнему ободу. Коэффициент трения грузов о плоскость
м. Массу шкивов считать равномерно распределенной по внешнему ободу. Коэффициент трения грузов о плоскость  .
.
Тела системы соединены друг с другом нитями, намотанными на шкивы; участки нитей параллельны соответствующим плоскостям.
Под действием силы  , зависящей от перемещения
, зависящей от перемещения  точки ее приложения, система приходит в движение из состояния покоя. При движении на шкивы действуют постоянные моменты
точки ее приложения, система приходит в движение из состояния покоя. При движении на шкивы действуют постоянные моменты  или
или  сил сопротивления (от трения в подшипниках).
сил сопротивления (от трения в подшипниках).
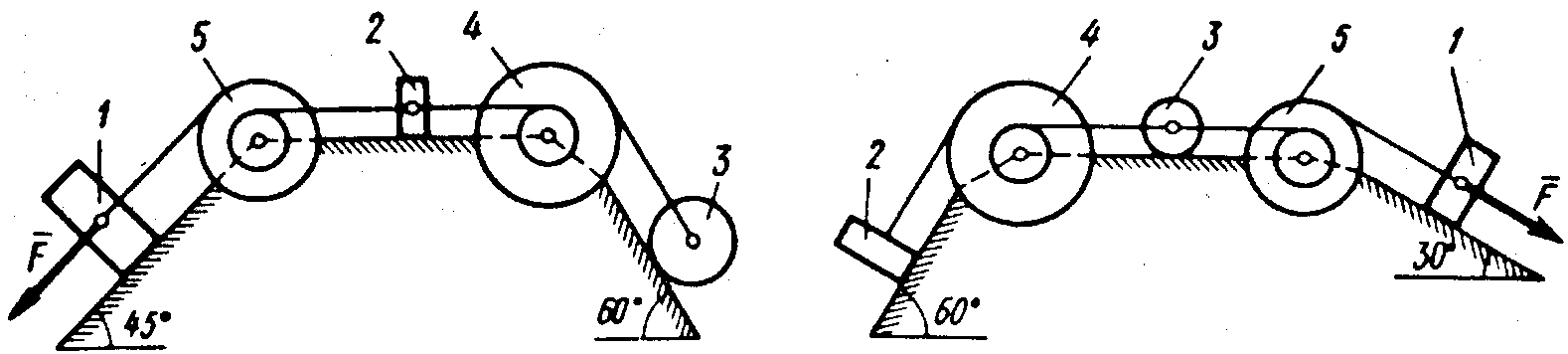
Рис. Д1.0 Рис. Д1.1

Рис. Д1.2 Рис. Д1.3
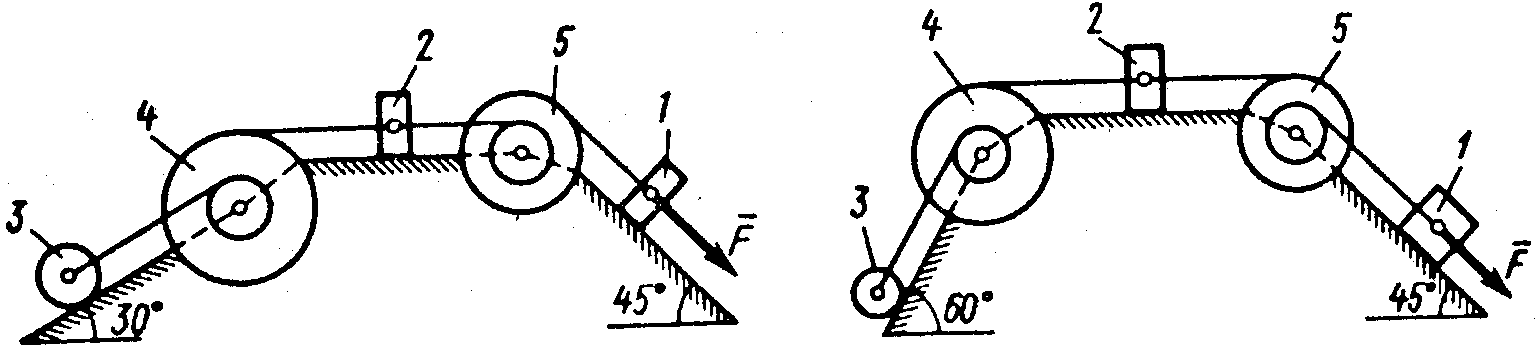
Рис. Д1.4 Рис. Д1.5

Рис. Д1.6 Рис. Д1.7
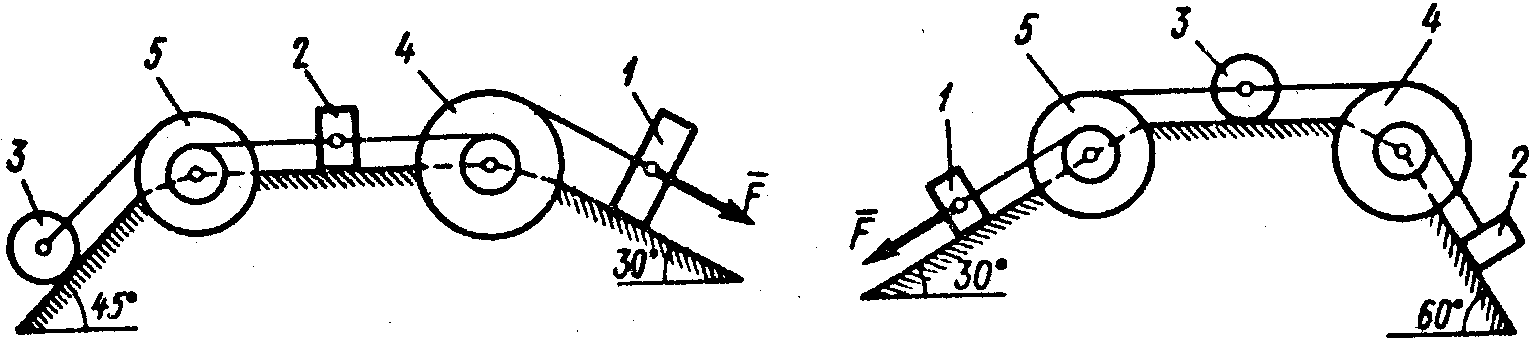
Рис. Д1.8 Рис. Д1.9
Определить значение искомой величины в тот момент времени, когда перемещение станет равным  . Искомая величина указана в столбце «Найти» таблицы Д1, где обозначено:
. Искомая величина указана в столбце «Найти» таблицы Д1, где обозначено:  ,
,  и
и  – скорости грузов 1, 2 и центра масс тела 3 соответственно,
– скорости грузов 1, 2 и центра масс тела 3 соответственно,  и
и  – угловые скорости тел 4 и 5.
– угловые скорости тел 4 и 5.
Каток катится по плоскости без скольжения. На всех рисунках можно не изображать груз 2, если  ; остальные тела должны изображаться и тогда, когда их масса равна нулю.
; остальные тела должны изображаться и тогда, когда их масса равна нулю.
Таблица Д1
| Номер условия | m 1, кг | m 2, кг | m 3, кг | m 4, кг | m 5, кг |  , ,

|  , ,
| ,
м
| , Н
| Найти |
| 0, 8 | 
|
| ||||||||
| 0, 6 | 1, 2 | 
| 
| |||||||
| 04, | 0, 8 | 
| 
| |||||||
| 0, 3 | 0, 6 | 
| 
| |||||||
| 0, 6 | 1, 4 | 
| 
| |||||||
| 0, 9 | 1, 6 | 
| 
| |||||||
| 0, 8 | 
|
| ||||||||
| 0, 6 | 0, 8 | 
| 
| |||||||
| 0, 3 | 1, 6 | 
| 
| |||||||
| 0, 4 | 1, 4 | 
| 
|
Указания. Задача Д1 – на применение теоремы об изменении кинетической энергии системы. При решении задачи учесть, что кинетическая энергия  системы равна сумме кинетических энергий всех входящих в систему тел; эту энергию нужно выразить через ту скорость (линейную или угловую), которую в задаче надо определить. При вычислении
системы равна сумме кинетических энергий всех входящих в систему тел; эту энергию нужно выразить через ту скорость (линейную или угловую), которую в задаче надо определить. При вычислении  для установления зависимости между скоростями точек тела, движущегося плоскопараллельно, или между его угловой скоростью и скоростью центра масс воспользоваться мгновенным центром скоростей (кинематика). При вычислении работы надо все перемещения выразить через заданное перемещение
для установления зависимости между скоростями точек тела, движущегося плоскопараллельно, или между его угловой скоростью и скоростью центра масс воспользоваться мгновенным центром скоростей (кинематика). При вычислении работы надо все перемещения выразить через заданное перемещение  , учтя, что зависимость между перемещениями здесь будет такой же, как между соответствующими скоростями.
, учтя, что зависимость между перемещениями здесь будет такой же, как между соответствующими скоростями.