Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Классификация силовых механизмов станочных приспособлений
|
|
Силовые механизмы приспособлений делятся на простые и комбинированные, т.е. состоящие из двух-трех сблокированных простых механизмов (см. схему).
К простым механизмам относятся клиновые, винтовые, эксцентриковые, рычажные, рычажно-шарнирные и др. Простые механизмы принято называть зажимами.
Комбинированные механизмы обычно выполняются как винто-рычажные, эксцентрико-рычажиые и т, п.
В тех случаях, когда простые или комбинированные механизмы используются в компоновках с механизированными приводами (пневматическими и др.), их называют механизмами-усилителями. По числу ведомых звеньев механизмы делятся на однозвенные, двухзвенные и многозвенные (многоточечные).
Каждый силовой механизм имеет ведущее звено, к которому прикладывается исходная сила, и одно или несколько ведомых звеньев (прижимных планок, плунжеров, кулачков), передающих обрабатываемой детали силы зажима. Многозвенные механизмы зажимают одну деталь в нескольких точках или несколько деталей в многоместном приспособлении одновременно и с равными силами.
Особую группу многозвенных механизмов составляют самоцентрирующие патроны и оправки.
По степени механизации силовые механизмы классифицируются на ручные, механизированные и автоматизированные.
Ручные механизмы требуют применения значительной мускульной энергии и утомляют рабочего. Механизированные работают от энергии, передаваемой приводом. Автоматизированные приводятся в действие перемещающимися столами, суппортами, шпинделями станков или центробежными силами вращающихся масс и осуществляют зажим и раскрепление изделий без участия рабочего.
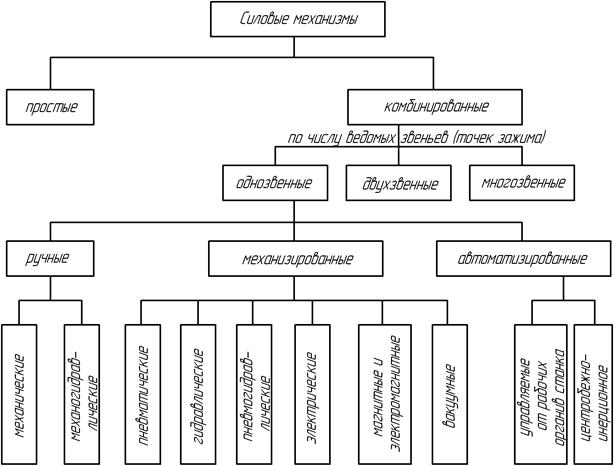
Рис. 4.4 Классификация силовых приводов
Для любого простого механизма можно определить передаточное отношение сил и передаточное отношение перемещений.
Передаточное отношение сил:
где W – сила, развиваемая на ведомом звене (сила зажима);
Q – сила, приложенная к ведущему звену механизма.
Соответственно для идеального механизма, т.е. механизма без трения:
Передаточное отношение перемещений:
где SW – перемещение ведомого звена;
SQ – перемещение ведущего звена;
Передаточное отношение i и iид всегда > 1 и характеризуют выигрыш в силе; iп – всегда < 1, и характеризует проигрыш в пути.
КПД механизма:

Для комбинированных механизмов, состоящих из нескольких последовательно сблокированных простых, передаточное отношение сил, перемещений и КПД определяется по формулам:
где k – число простых механизмов в комбинированном приводе.
Сила зажима W, развиваемая комбинированным механизмом, определяется по формуле:
 ,
,
где Q – исходная сила зажима на рукоятке или штоке привода;
Так, например, если в комбинированном механизме, состоящем из последовательно сблокированных винтового, клинового и рычажного механизмов, первый повышает исходную силу Q на рукоятке в 75 раз (i1 =75), второй повышает силу первого в 3 раза (i2 =3), а третий повышает силу второго в 2 раза (i3 =2), то:

Если характеристики  простых механизмов заранее неизвестны, то расчет силы зажима W, развиваемой комбинированным механизмом, можно выполнить последовательно.
простых механизмов заранее неизвестны, то расчет силы зажима W, развиваемой комбинированным механизмом, можно выполнить последовательно.
Вначале определяем силу  , развиваемую первым простым механизмом; затем рассматривая ее как исходную силу
, развиваемую первым простым механизмом; затем рассматривая ее как исходную силу  , развиваемую вторым механизмом, и т.д. Количество простых силовых механизмов ограничено, и все они в основе своей являются клиновыми или рычажными. Следовательно, комбинированные механизмы представляют собой систему из клиновых, рычажных или клино-рычажных механизмов.
, развиваемую вторым механизмом, и т.д. Количество простых силовых механизмов ограничено, и все они в основе своей являются клиновыми или рычажными. Следовательно, комбинированные механизмы представляют собой систему из клиновых, рычажных или клино-рычажных механизмов.