Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Двигателей
|
|
Для работы шагового двигателя характерным является регулирование частоты вращения в широком диапазоне путем изменения частоты подачи управляющих импульсов тока. Таким же способом осуществляют его фиксированный останов, пуск и изменение направления вращения. В зависимости от частоты управляющих импульсов различают следующие режимы работы шаговых двигателей: статический, квазистационарный, установившийся и переходные.
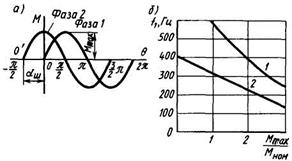
Рис. 2.44. Рабочие характеристики шагового двигателя (а, б)
Статический режим – это режим прохождения по обмоткам возбуждения постоянного тока, создающего неподвижное поле. При питании одной фазы зависимость электромагнитного момента M от угла рассогласования θ близка к синусоидальной (рис. 2.44, а). Поскольку при θ = 0 синхронизирующий момент равен нулю, возникает статическая ошибка в положении ротора; она тем больше, чем больше нагрузка и меньше максимальный момент. В двигателях с гребенчатыми выступами на статоре и шагом, равным 1, 5°, статическая ошибка составляет не более 0, 5°.
Квазистационарный режим – это режим отработки единичных шагов, например в приводах различных старт-стопных, лентопротяжных и других подобных механизмов. Предельная частота квазистационарного режима ограничена временем затухания колебаний ротора, которые могут возникнуть при переходе ротора из одного устойчивого положения в другое (точки 0 и 0' на рис. 2.44, а), аналогично тому, как это происходит в обычной синхронной машине при резком изменении угла θ. Для устранения колебаний ротора в конце шага применяют различные демпфирующие устройства и обгонные муфты. Предельную частоту квазистационарного режима повышают, увеличивая число фаз обмотки якоря или число тактов коммутации (восьмитактная коммутация при четырехфазной обмотке, шеститактная – при трехфазной). Во всех этих случаях при отработке шага уменьшается угол перемещения и кинетическая энергия ротора, что снижает его склонность к колебаниям.
Установившийся режим – это режим, соответствующий постоянной частоте управляющих импульсов. Ротор двигателя в установившемся режиме имеет постоянную частоту вращения, но при переходе из одного устойчивого состояния в другое возникают периодические и апериодические колебания относительно мгновенной точки устойчивого равновесия. При частоте управляющих импульсов f1, меньшей частоты свободных колебаний двигателя f0, угловое перемещение ротора при каждом шаге, как и в квазистационарном режиме, сопровождается свободными колебаниями, которые существенно увеличивают динамическую ошибку при отработке ротором заданного перемещения. Частота свободных колебаний ротора
 , (2.41)
, (2.41)
где Мmax – максимальный электромагнитный момент при неподвижном роторе; Jр и Jн – моменты инерции ротора и нагрузки, приведенной к валу ротора.
При частоте управляющих импульсов, равной или в целое число раз меньшей частоты f0, возникает явление электромеханического резонанса, которое при слабом демпфировании колебаний может вызвать нарушение периодичности движения ротора и привести к выпадению его из синхронизма. При частоте f1 > f0 возникают вынужденные колебания с частотой, равной частоте управляющих импульсов; амплитуда их монотонно уменьшается с увеличением частоты. Для устойчивой работы шагового двигателя необходимо, чтобы Мн/Мmax ≤ 0, 3...0, 5, Jн/Jр ≤ 1...2 и имелось внутреннее или внешнее демпфирование.
Электромагнитный момент шагового двигателя в общем случае состоит из двух частей: синхронизирующего момента, зависящего от угла θ между осями МДС обмотки якоря и ротора, и асинхронного тормозного момента, пропорционального частоте вращения, т.е. dθ /dt:
 . (2.42)
. (2.42)
Параметр D называют коэффициентом внутреннего демпфирования. Физически внутреннее демпфирование, т.е. тормозной момент Μ т в двигателях с постоянными магнитами или обмоткой возбуждения на роторе, возникает в результате взаимодействия вращающегося потока ротора с током в обмотке якоря. У реактивных двигателей этот момент зависит от разности индуктивных сопротивлений (Xd – Xq) обмотки якоря и ее активного сопротивления Ra. При достаточно большом значении коэффициента D происходит эффективное затухание колебаний ротора двигателя. Этому способствует также наличие трения и внешних демпфирующих устройств.
Переходные режимы – основные эксплуатационные режимы шаговых двигателей, включающие в себя пуск, торможение, реверс, переход с одной частоты на другую. Основное требование, предъявляемое к шаговым двигателям в переходных режимах, – сохранение синхронизма при изменении частоты управляющих импульсов, т. е. отсутствие потери шага.
Для каждого шагового двигателя существует некоторая предельная частота подачи управляющих импульсов fпр, при которой ротор еще следует за скачкообразно изменяющимся полем статора. Эту частоту называют частотой приемистости. Частота приемистости характеризует пусковые свойства шагового двигателя – максимальную частоту управляющих импульсов, при которой возможен пуск без выпадения из синхронизма. Она возрастает с увеличением синхронизирующего момента, уменьшением углового шага, нагрузки и момента инерции.
Для современных шаговых двигателей при номинальной нагрузке частота приемистости fпр = 100...1000 Гц. Предельная частота, при которой осуществляется торможение шагового двигателя без потери шага (с сохранением синхронизма), как правило, выше частоты приемистости: это объясняется влиянием внутреннего демпфирования, момента нагрузки и момента трения. Предельная частота реверса, при которой реализуется реверс без выпадения из синхронизма (без потери шага), составляет (0, 2...0, 5)fпр. Только в двигателях с большим демпфированием и электромагнитными постоянными времени обмоток якоря предельные частоты реверса и приемистости примерно равны.
РАБОЧИЕ ХАРАКТЕРИСТИКИ ШАГОВЫХ ДВИГАТЕЛЕЙ
Они определяются параметрами двигателя, нагрузки (нагрузочный момент и момент инерции) и особенностями электронного коммутатора (числом тактов коммутации, формой его выходного напряжения и пр.). Основные характеристики следующие: статическая, предельная механическая и предельная динамическая приемистости.
Статическая характеристика – зависимость электромагнитного момента M от угла θ (рис. 9.19, а), а также зависимость тока двигателя от нагрузки в квазистационарном режиме.
Предельная механическая характеристика – зависимость частоты управляющих импульсов от максимального момента на валу ротора, при котором происходит выпадение двигателя из синхронизма (рис. 9.19, б, кривая 1). Ее снимают при плавном увеличении частоты f1.
Предельная динамическая характеристика приемистости – зависимость частоты приемистости fпр в динамическом режиме (например, при пуске) от момента нагрузки M (рис. 2.44, б, кривая 2). Рабочие характеристики снимают при различных сочетаниях включаемых обмоток, моментах инерции двигателя и нагрузки и пр.
ОБЛАСТИ ПРИМЕНЕНИЯ ШАГОВЫХ ДВИГАТЕЛЕЙ
При высоких частотах вращения (2000...3000 об/мин) применяют шаговые двигатели с постоянными магнитами на роторе. Наличие активного ротора позволяет получить относительно большие моменты и обеспечить фиксацию ротора при обесточенных обмотках. У этих двигателей номинальный вращающий момент Мном = 0, 1...10 H∙ см, угловой шаг α ш = 15°. При низких частотах вращения (до 1000 об/мин) и малом шаге применяют индукторные и реактивные двигатели с гребенчатыми выступами на полюсах статора. Их номинальный момент Мном = 1...25 H∙ см, а угловой шаг α
ЛЕКЦИЯ № 16