Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Исследование механических характеристик и переходных процессов асинхронного электродвигателя с контактными кольцами
|
|
Цель работы:
Снять механические и временные характеристики асинхронного электродвигателя с контактными кольцами экспериментальным путем. Ознакомиться с его регулировочными свойствами; особенностями пуска, тормозных режимов; энергетическими показателями.
Теоретические предпосылки
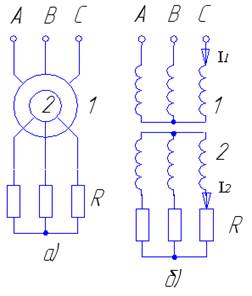 Условное обозначение и принципиальная электрическая схема асинхронного электродвигателя с контактными кольцами приведены на рис. 3 а, б.
Условное обозначение и принципиальная электрическая схема асинхронного электродвигателя с контактными кольцами приведены на рис. 3 а, б.
Здесь: 1 и 2 - статор и ротор электродвигателя; R - добавочное сопротивление ≠ 0
Асинхронный электродвигатель, в общем случае, математически может быть описан системой четырнадцати дифференциальных уравнений с четырнадцатью неизвестными, учитывающими электромагнитную инерционность его обмоток и изменение кинематической энергии ротора. Сделав определенные допущения, для фазы А статора получим:
 ; (9)
; (9)
Рис.3
для фазы о ротора:
 , (10)
, (10)
где Ψ A и Ψ а - потокосцепления обмоток фаз статора и ротора;
R1 и R’2 - сопротивление фазы статора и приведенное ротора;
IA и Ia - мгновенное значение токов. фазы А статора и а ротора;
t - текущее значение времени.
Потокосцепление фазы А и, например, фазы В статора, обусловленное наличием взаимоиндукции для статора:  (11)
(11)
для ротора:
 (12)
(12)
Здесь: I1 и I2 - индуктивность обмотки статора и ротора;
M12 - взаимоиндукция между обмотками статора и ротора;
 - электрический угол между осями фазы А статора и а ротора. Электромагнитный момент асинхронного двигателя:
- электрический угол между осями фазы А статора и а ротора. Электромагнитный момент асинхронного двигателя:
 , (13)
, (13)
где WЭ - электромагнитная энергия асинхронного электродвигателя
 . (14)
. (14)
Уравнение движения:
 , (15)
, (15)
где М и Мс - движущий и статический моменты,
J и GД - момент инерции и маховой момент электродвигателя;
ω и n - скорость вращения электродвигателя [1/сек] и [об./мин.];
t - текущее значение времени [сек].
Для получения временных характеристик ω (t) и M(t) необходимо решить уравнения (9+15) совместно относительно скорости или n и момента М во времени. Однако эта система уравнений трудоемка, имеет высокий порядок дифференциального уравнения, содержит нелинейные уравнения с периодическими коэффициентами и решение их, даже с помощью вычислительных машин, затруднительно.
Поэтому, для проведения качественного анализа. Целесообразно пользоваться упрощенной системой уравнений, которая, например, для случая подключения двигателя в сеть может быть представлена в виде:
 (16)
(16)
и
 (17)
(17)
Здесь  и
и  - векторы токов статора и ротора:
- векторы токов статора и ротора:
 (18)
(18)
и
 (19)
(19)
где  и
и  - установившиеся значения токов статора в ротора.
- установившиеся значения токов статора в ротора.
Вторые два члена выражений (18) и (19) представляют собой свободные составляющие, которые уменьшаются во времени в соответствии с коэффициентами  и
и  и изменяются во времени с частотой
и изменяются во времени с частотой  и
и  .
.
Коэффициенты А11 A12, A21, A22 - постоянные комплексные числа, определяемые начальными условиями. P - число пар полюсов.
Решая (16+19) совместно, сделав допущение что, ω =ω ср.=Const, после преобразований случим временную характеристику M(t) с учетом электромагнитных переходных процессов:
 (20)
(20)
Здесь:  - установившееся значение момента двигателя (М=Му=Мс),
- установившееся значение момента двигателя (М=Му=Мс),
 и
и  - начальные значения апериодических свободных составл.,
- начальные значения апериодических свободных составл.,
 ,
,  ,
,  и
и  ,
,  ,
,  соответственно, амплитуды периодических свободных составляющих момента к их начальные фазы.
соответственно, амплитуды периодических свободных составляющих момента к их начальные фазы.
Наиболее сильное влияние на переходные процессы оказывают свободные составляющие токов и моментов, затухающих с наименьшим коэффициентом затухания  ; причем, чем меньше
; причем, чем меньше  , тем медленнее затухает переходный процесс, и наоборот.
, тем медленнее затухает переходный процесс, и наоборот.
Реальные переходные процессы электропривода зависят от величины ω которая изменяется в процессе, пуска, реверса, торможения. Поэтому выражена. (20) целесообразно использовать при небольших пределах изменения скорости двигателя и для качественного анализа влияния различных параметров двигателя и системы электропривода на электромагнитные переходные процессы.
Значительное влияние на время переходного процесса асинхронного привода оказывает незатухающее магнитное поле, например при реверсе электродвигателя (отключении его от сего и подачи напряжения на статор с другим чередованием фаз). При отключении двигателя от сети магнитное поле не может исчезнуть мгновенно до нуля; некоторое время всегда имеет место незатухающее магнитное поле. Оно влияет на протекающие переходные процессы oт нового включения.
Однако в некоторых случаях, например при пуске двигателя, электромагнитные переходные процессы мало влияют на время пуска, поэтому их можно не учитывать и исходить при расчетах и анализе из механической характеристики и уравнения движения (15).
Аналитическое выражение механической характеристики асинхронного электродвигателя в общем случае имеет вид:
 (21)
(21)
где Мк и sк - критические значения момента и скольжения двигателя, М и s - текущие значения момента и скольжения,  .
.
Если для упрощения анализа пренебречь в виду малости  и
и 
то после преобразований получим линейное выражение для механической
характеристики:
 (22)
(22)
Решая (15) и (22) совместно относительно интересующих нас зависимых переменных ω, М, I, S во времени, после преобразования получим временные характеристики асинхронного электродвигателя, при сделанных допущениях, в виде:
 ; (23)
; (23)
 ; (24)
; (24)
 . (25)
. (25)
Здесь: t=∞ соответствующие ω, М и I2 - текущие значения скорости, момента и тока ротора;
ω нач, Мнач и Iнач - их начальные значения, соответствующие t=0;
ω с, Мс и Iс установившиеся значения скорости, момента и тока, e - основание натуральных логарифмов = 2, 7;
р - корень характеристического уравнения  ;
;
А, В и С -постоянные интегрирования, определяемые из начальных
условий: 
Тм- электромеханическая постоянная времени, обусловленная наличием механической инерционности, то есть  (или
(или  ). Физически это
). Физически это
означает, что в момент начала переходного процесса, то есть при t=0, скорость не делает скачка, а изменяется по экспоненте. Так при неподвижном двигателе, например в момент пуска, изменяется мгновенно до своего начального значения (так как электромагнитная инерционность не учитывается), а затем изменяется по обратной экспоненте по отношению к скорости, в связи с ее изменением.
Электромеханическая постоянная времени может быть определена по формуле:
 , (26)
, (26)
где ω 0 и n0 - синхронные скорости электродвигателя, 
sн скольжение по механической характеристике при M=Mн,
375-размерный коэффициент.
Для случая пуска в выражении (15) надо положить: при t=0; ω нач=0 так как до пуска двигатель находился в состоянии покоя. Тогда для скорости получим:

Соответственно, для тока и момента в выражения (25) и (26) надо положить: при t=0, Мнач =Мп и Iнач =Iп; и для пуска вхолостую Ic = 0.
Тогда получим:  и
и  .
.
Следовательно, при пуске двигателя, и принятых допущениях, скорость изменяется по возрастающей, а ток и момент по убывающей экспонентам (рис.4, а).
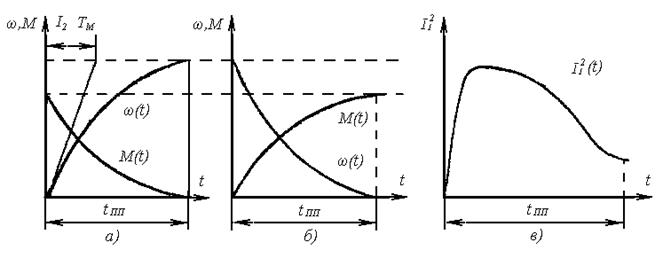
Рис.4
Рассуждая аналогично, для замедления, вследствие приема нагрузки М=Мn,
получим:  и
и 
То есть в этом случае ω, М и I2 изменяются во времени по обратному закону (рис.4, б).
При установившемся режиме работы двигателя  и
и  , поэтому решение уравнений (15) и (22) будет:
, поэтому решение уравнений (15) и (22) будет:  то есть в этом случае двигатель работает на так называемой механической характеристике, развивает Момент М=Мс и вращается со скоростью ω = ω с, значения которых во времени постоянны, так как режим установившейся. К тому же выводу можно прийти если в выражениях (23), (24), (25) положить t=∞ Снятие временных характеристик сводится, обычно, к осциллографированию переходных процессов, что пояснений не требует.
то есть в этом случае двигатель работает на так называемой механической характеристике, развивает Момент М=Мс и вращается со скоростью ω = ω с, значения которых во времени постоянны, так как режим установившейся. К тому же выводу можно прийти если в выражениях (23), (24), (25) положить t=∞ Снятие временных характеристик сводится, обычно, к осциллографированию переходных процессов, что пояснений не требует.
Пользуясь временными характеристиками тока, можно определить потери энергии при переходной процессе и общий расход электроэнергии;
 , (28)
, (28)
где Амех - полезная механическая работа, совершаемая двигателем при п.п. Δ А -потери энергии при переходном процессе, определяете по формуле
 (29)
(29)
здесь:  ,
,  - потери в меди статора и меди ротора двигателя
- потери в меди статора и меди ротора двигателя
 ,
,  - потери механические и в стали двигателя [вт.сек]
- потери механические и в стали двигателя [вт.сек]
Потери в меди статора, располагая данными обработанных осциллограмм, могут быть определены по закону Джоуля - Ленца:
 , (30)
, (30)
Здесь: m - число фаз статора асинхронного двигателя = 3;
 -активное сопротивление фазы статора электродвигателя [ом];
-активное сопротивление фазы статора электродвигателя [ом];
I1, IM - эффективное и амплитудное значение тока фазы статора [а];
tпп - время переходного процесса;
Q - площадь ограниченная кривой  и осью времени t, полученной в результате обработки осциллограмм тока, (рис. 4, в).
и осью времени t, полученной в результате обработки осциллограмм тока, (рис. 4, в).
После не сложных преобразований выражений (30) может быть представлено в более удобном виде для пользования:
 , [Вт.сек.] (31)
, [Вт.сек.] (31)
где  - масштаб тока [A/см] и масштаб времени [сек./см].
- масштаб тока [A/см] и масштаб времени [сек./см].
Потери в меди ротора зависят от запаса кинетической энергии и пределов скольжений:
 [Вт.сек] (32)
[Вт.сек] (32)
где s1, s2 и - пределы скольжения;
ω 0 - синхронная скорость;
Механические потери могут быть определены по формуле:
 [Вт.сек] (33)
[Вт.сек] (33)
где Рмех - механические потери мощности [Вт]
Потери энергии в стали:
 [Вт.сек] (34)
[Вт.сек] (34)
где  - потери мощности в стали двигателя при холостом ходе [Вт]
- потери мощности в стали двигателя при холостом ходе [Вт]
Полезная механическая работа, совершаемая двигателем при: пуске вхолостую:
 [Вт.сек] (35)
[Вт.сек] (35)
Анализ механических характеристик
асинхронного электродвигателя с контактными кольцами
Механической характеристикой асинхронного электродвигателя называется зависимость ω (МЭ), скорости вращения ω от электромагнитного момента Mэ. Она характеризует поведение скорости при изменении нагрузки на валу в установившемся режиме работы двигателя. Аналитическое выражение механической характеристики может (быть получено из схемы замещения двигателя и представлено в виде (21).
Взаимосвязь между скоростью ω и скольжением S осуществляется выражением:
 (36)
(36)
Задаваясь значением ω и подсчитывая по (21) момент М, считая ω 0, Мк и Sк заданным, можно рассчитать и построить механическую характеристику. Из приведенных соотношений видно, что при ω =0, s=1 и, соответственно. при ω = ω 0, s=0. То есть механическую характеристику можно строить как в осях скольжения s, так и в осях скорости ω или n, как показано на рис.5.
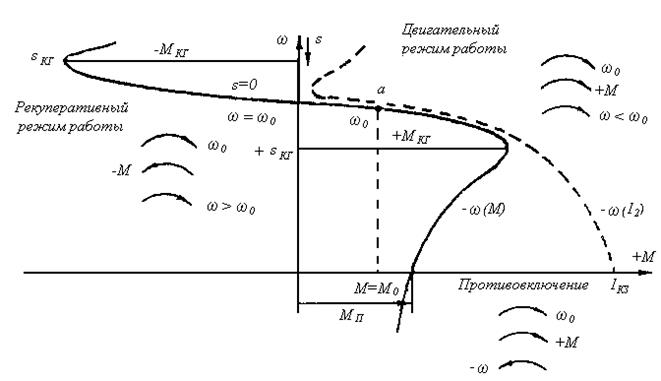
Рис.5
Здесь: ω 0 - синхронная скорость электродвигателя - скорость вращения
магнитного поля, которую в приводе принято называть скоростью идеального холостого хода:
 [1/сек.], (37)
[1/сек.], (37)
где f и P - частота напряжения сети и число пар -полюсов двигателя. Асинхронные электродвигатели выпускаются с n0 =3000, 2000, 1500, 1000, 750, 500... [об./мин]. Скорость n0 не зависит от напряжения U1 и conpот.R’2.
sк - критическое скольжение, зависящее от величины сопротивления ротора может быть определено по формуле:
 (38)
(38)
где  - перегрузочная способность двигателя по моменту (I, 8-2, 5).
- перегрузочная способность двигателя по моменту (I, 8-2, 5).
 - номинальный момент электродвигателя,
- номинальный момент электродвигателя,
 [кГм] или
[кГм] или  [н.м.] (31)
[н.м.] (31)
 -номинальная мощность двигателя [кВт],
-номинальная мощность двигателя [кВт],
 - номинальная скорость двигателя [об./мин.]
- номинальная скорость двигателя [об./мин.]
 - приведенное сопротивление ротора и добавочное сопротивление:
- приведенное сопротивление ротора и добавочное сопротивление:
 [Ом], (39)
[Ом], (39)
где  - коэфф. трансформации,
- коэфф. трансформации,
sн – номинальное скольжение электродвигателя
 . (40)
. (40)
На рабочей части характеристики  можно считать, что момент М пропорционален току I2, поэтому механическая и электромеханическая характеристики, в соответствующем масштабе, совладают.
можно считать, что момент М пропорционален току I2, поэтому механическая и электромеханическая характеристики, в соответствующем масштабе, совладают.
При ω 0=0, s=1, поэтому двигатель имеет небольшой коэфф. мощности, развивает небольшой пусковой момент и потребляет из сети большой пусковой ток I2=IКЗ. В этом случае указанные характеристики представляют собой разные зависимости, в осях ω, М и I2.
Момент критический зависит от квадрата напряжения сети U1 и не зависит от сопротивления цепи ротора:
 [кГм], (41)
[кГм], (41)
здесь (+) для двигательного режима работы, (-) для генераторного.
Так как ω 0 и x зависят от первой степени частоты 1, то выражение (41) можно представить в виде:
 [кГм], (42)
[кГм], (42)
где с1 - постоянный коэффициент и принято R1=0, так как при больших f, R< < x. Путем аналогичных рассуждений можно показать, что при s=1, то есть при пуске двигателя:
 (43)
(43)
Из приведенных соотношений следует, что пусковой момент обратно пропорционален кубу частоты, то есть уменьшение частоты напряжения благоприятно сказывается на пусковых свойствах двигателя. Следовательно, изменив R2, U1, f можно использовать, в принципе, для улучшения условий пуска, торможения, конфигурации механической характеристики и для регулирования скорости.
На практике для асинхронных электродвигателей с контактными кольцами, из перечисленных, наиболее широко применяется работа двигателя на peocтатных механических характеристиках, то есть при введении добавочного сопротивления в цепь ротора (рис.6).
Так как sк пропорционально R’2, то реостатые характеристики имеют меньшую жесткость, чем естественная, а их максимумы лежат на одной прямой М=Мк, который не зависит от величины R2. При изменении 0< Rдоб< Rн можно получить семейство механических характеристик ниже основной /естественной/, выходящих из одной точки ω о которая не зависит от Rдоб. Это можно применить для регулирования скорости двигателя в диапазоне 1: 3; для увеличения пускового момента, сокращения времени пуска; для улучшения конфигурации /линеаризации/ механической характеристики при пуске, с целью наиболее равномерного распределения возникающих ускорений при пуске, что благоприятно сказывается на кинематике привода. При пуске без Rдоб в точке перегиба временной характеристики скорости, соответствующей М=Мк, ускорения выходят, обычно, за пределы допустимых, что сказывается на износе Механической части привода. Введение сопротивления в ротор при пуске двигателя снижает пусковой ток I2п, что благоприятно сказывается на сеть, особенно при больших мощностях привода. Это видно из аналитического выражения электромеханической характеристики  , если положить в ней S=1:
, если положить в ней S=1:
 (44)
(44)
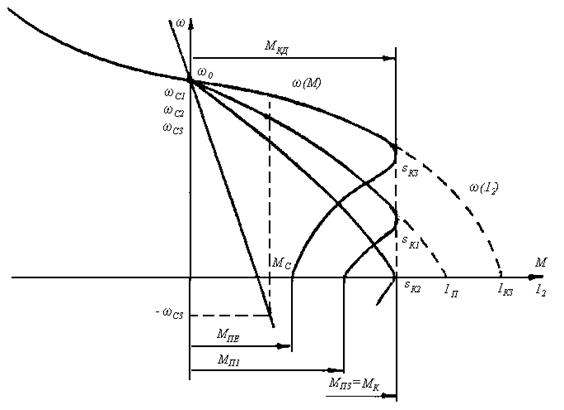
Рис.6
Полное сопротивление фазы ротора можно подсчитать по формуле:
 (45)
(45)
где  - полное сопротивление цеди ротора в долевых единицах. Оно может
- полное сопротивление цеди ротора в долевых единицах. Оно может
быть найдено графически в виде отрезка, отсекаемого механической – характеристикой и асимптотой ω 0 при M=Mн=  ; Rн - номинальное сопротивление электродвигателя:
; Rн - номинальное сопротивление электродвигателя:
 , [Ом] (46)
, [Ом] (46)
где  - э.д.с. между кольцами неподвижного разомкнутого ротора,
- э.д.с. между кольцами неподвижного разомкнутого ротора,
 номинальное значение тока ротора электродвигателя. Добавочное сопротивление может быть определено как:
номинальное значение тока ротора электродвигателя. Добавочное сопротивление может быть определено как: 
При динамическом торможении электродвигатель отключается от сети переменного тока и затем обмотка статора подключается к источнику постоянного - тока через добавочное сопротивление, чтобы ток обмотки статора был в пределах допустимого, а к обмотке ротора подключают сопротивление, называемое динамическим. В этом случае двигатель работает как генератор переменной частоты. Торможение длится до тех пор, пока весь запас кинетической энергий, накопленный при пуске, не превратится в джоулево тепло в сопротивлении силовой цепи ротора.
Конфигурация механической характеристики при динамическом торможении зависит от принятого соединения обмоток статора, которые приведены в [л]. В частном случае, аналитическое выражение для динамической характеристики может быть получено, если генераторный режим двигателя заменить эквивалентным двигательным. Для этого действующую схему с постоянным током в статор заменяют эквивалентной по действию м.д.с. на переменном токе. Взаимосвязь между переменным IС и постоянным IВ токами осуществляется империческими коэффициентами.
При этих условиях динамическая характеристика будет:
 , (47)
, (47)
где  и
и  - являются сложными функциями IС и IВ;
- являются сложными функциями IС и IВ;

Рис.6
На рис.6 проведены сплошными линиями механические характеристики для работы двигателя в режиме динамического торможения при различных сопротивлениях цепи ротора  и
и  , а также штриховыми линиями для других значений
, а также штриховыми линиями для других значений  и тех же значений . Из них следует, что при одной и той же скорости
и тех же значений . Из них следует, что при одной и той же скорости  , величина тормозного момента, а, следовательно, и время тормозном, зависят от и Причем, с увеличением и уменьшением тормозной эффект возрастает. Исследование механических характеристик в режиме противовключения в этой работе не рассматривается.
, величина тормозного момента, а, следовательно, и время тормозном, зависят от и Причем, с увеличением и уменьшением тормозной эффект возрастает. Исследование механических характеристик в режиме противовключения в этой работе не рассматривается.
Программа работы
1. Ознакомиться с электрооборудованием опытной установки и схемой испытаний. Записать данные электрических машин и приборов. В случае необходимости подобрать дополнительно приборы, нужные для проведения опыта.
2. Определить параметры, необходимые для проведения расчетов.
3. Снять и построить механические характеристики  для случаев:
для случаев:
а) Естественную, для двигательного и рекуперативного режимов работы
б)Реостатное для сопротивлений  и
и  .
.
в) Динамические по указанию преподавателя.
г) Кривую тока потерь холостое хода: 
Пользуясь методикой [л] найти механические характеристики ИД: 
4. Снять и построить временные характеристики  и
и  для случаев пуска напрямую, реостатного пуска, остановки выбегами с динамическим торможением. Обработать осциллограммы, оценить характер переходного процесса и определить его показатели.
для случаев пуска напрямую, реостатного пуска, остановки выбегами с динамическим торможением. Обработать осциллограммы, оценить характер переходного процесса и определить его показатели.
5. Пользуясь полученными осциллограммами, определить потери при переходном процессе для случаев, указанных в пункте 4.
6. Определить максимально-возможный диапазон регулирования скорости изменением сопротивления в цепи ротора при  и
и  . Оценить др. показатели реостатного регулирования скорости.
. Оценить др. показатели реостатного регулирования скорости.
7. Проделать теоретический анализ показателей статики, динамики и энергетики и сделать обобщающие выводы по работе в целом.
Метод исследований
В настоящей работе предусмотрен экспериментальный метод исследований механических и временных характеристик, соответственно, с помощью нагрузочных машин [л] и осциллографирования переходных процессов.
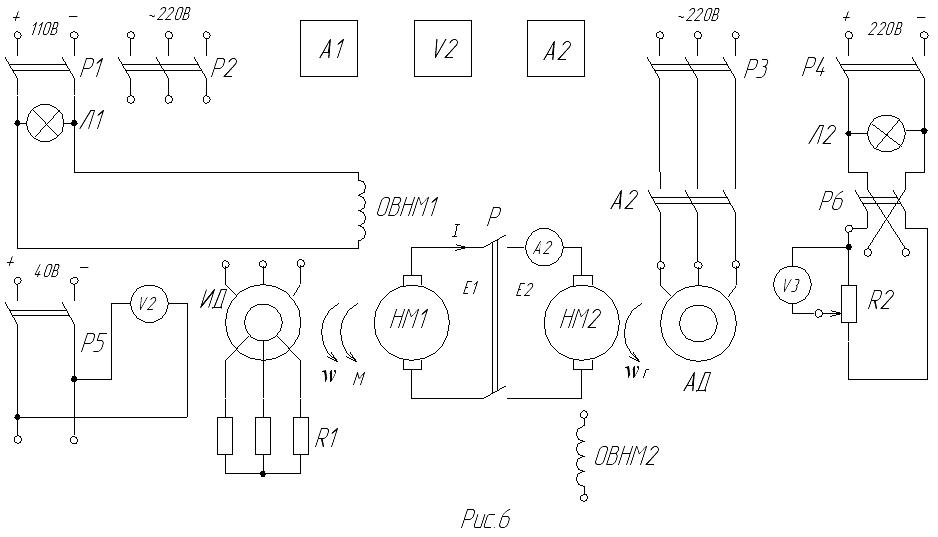
Схема опытной установки приведена на рис.6. Цепи показанные штриховыми линиями предлагается собрать студентам, остальные – собраны.
Здесь: ИД- испытуемый электродвигатель;
АД - асинхронный электродвигатель- гонник агрегата  ;
;
НМ1 и НМ2 нагрузочные машины постоянного тока нез. возбуждения;
R1 - силовой реостат в цепи ротора ИД;
R2 - регулировочный реостат (потенциометр);
Л1 и Л2 - сигнальные лампы;
Р1, Р2, Р3, Р4 - рубильники.
Указания по снятию характеристик
Предупреждения.
Запрещается; подавать напряжение на якорь НМ1 при. отсутствии возбуждения и отключать ее обмотку возбуждения (ОВНМ1) во время работы НМ1; подавать на нагрузочную машину НМ1сразу полное напряжение; запускать ИД без добавочного сопротивления R1 в роторе; превышать скорость агрегата ИД-НМ1более, чем в I, 3, ω н; превышать значение тока электрических машин при длительной работе более, чем в 1, 2Iн; включать рубильник Р при согласном направлении Е1 и Е2 перегружать сопротивления током более чем их номинальные значения.
Порядок включения опытной установки.
При включении опытной установки в работу рекомендуется соблюдать следующую последовательность операций:
а) Привести схему в исходное состояние. При этом все выключатели должны находиться в выключенном положении (положение 0); пусковой реостат R1 должен быть полностью введен; потенциометр R2 должен находиться; в нулевом положении; рубильник Р- разомкнут.
б) Проверить, при необходимости, поверочным вольтметром наличие напряжения на клеммах стенда.
в) Собрать схему и убедиться в правильности соединений цепей.
г) Включить Р2, подать напряжение на обмотку статора ИД и убедиться во вращении ротора двигателя.
д) Включением выключателя Р1подать напряжение на ОВНМ1к поверочным вольтметром убедиться в наличии напряжения на зажимах якоря НМ.
е) Включением выключателя Р3 подать напряжение на обмотку статора АД и убедиться в его вращении.
ж) Включить выключатель Р4 установкой переключателя Р6 и потенциометра Р2 в соответствующее положение возбудить НМ2. Пользуясь поверочным вольтметром, перемещая движок R2, добиться равенства по величине и противоположности по знаку Е1 по отношению Е2.
з) Включением Р замкнуть силовую цепь нагрузочных машин и убедиться в отсутствии тока I. После этого можно приступить к снятию электромеханической характеристики НМ1 сначала, для рекуперативного и затем для двигательного режимов работы. Полученные данные необходимо пересчитать в единицы момента.
Для снятия механических характеристик в режиме динамического торможения необходимо:
а) Привести опытную установку в исходное состояние, отсоединить обмотку
статора ИД от сети переменного тока и подключить eе к сети постоянного тока 40 В. Включением Р5 подать напряжение на статор ИД.
б) Включить выключатель Р1 и Р, запустить агрегат постоянной скорости и постепенно увеличивать напряжение на ОВНМ2. Измерить для каждого АД-НМ2 установившегося состояния равновесия привода скорость  и ток I для НМ1 и после пересчета на момент построить зависимость
и ток I для НМ1 и после пересчета на момент построить зависимость  .
.
Кривая момента потерь холостого хода  снимается при отключенном ИД. Для этого регулируется скорость НМ1 по системе генератор-двигатель (НМ1-НМ2) и для каждого установившегося состояния равновесия измеряется скорость и ток I НМ1. После пересчета на момент строиться зависимость .
снимается при отключенном ИД. Для этого регулируется скорость НМ1 по системе генератор-двигатель (НМ1-НМ2) и для каждого установившегося состояния равновесия измеряется скорость и ток I НМ1. После пересчета на момент строиться зависимость .
Механические характеристики ИД получают суммированием моментов при одной и той же скорости характеристик снятых для НМ1и кривой потерь.
Контрольные вопросы
1. Дайте определение получавшее в процессе эксперимента характеристик и обмените их конфигурацию во всех режимах работа. Оцените особенности пуска, остановки выбегом и электрического торможения ИД. Объясните, как влияют параметры: Uc, R2, f и др., на конфигурацию снятых характеристик.
2. Рассмотрите и оцените режимы работы всех электрических машин при
снятии характеристик (двигательный, генераторный). Объясните, когда, почему и как изменяется момент потерь холостого хода.
3. Оцените показатели регулирования скорости при изменении сопротивления R2 в роторе ИД диапазон регулирования скорости и зависимость
его от нагрузки; степень плавности и стабильности характеристик; возможные направления регулирования; степень экономичности.
4. Укажите последовательность расчета механических характеристик.
5. В каких случаях и почему целесообразно учитывать электромагнитные переходные процессы в асинхронном электродвигателе, и какое влияние они оказывают на работу привода?
6. Перечислите возможные пути уменьшения потерь энергии при переходном процессе в асинхронном электродвигателе.
7. Расскажите, как работает схема опытной установки, назначение ее элементов, как выбрать параметры элементов (сопротивления реостатов и др.) Какова последовательность операций при включении опытной установки в действие, а также при снятии механических и временных характеристик. В чем состоит метод исследования с помощью нагрузочных машин.
8. Оценим возможные последствия из-за неправильного соблюдения последовательности операций при пользовании опытной установкой. Заострите особое внимание на мероприятиях по технике безопасности.
Рекомендуемая литература указана в методических указаниях по снятию механических характеристик экспериментальным путем с помощью нагрузочных машин.