Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Управление в функции тока. Схема пуска асинхронного двигателя с фазным ротором.
|
|
Пусковые свойства асинхронного двигателя зависят от особенностей его конструкции, в частности от устройства ротора.
Пуск асинхронного двигателя сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент двигателя уравновешивает момент сил сопротивления на валу машины.
При пуске асинхронного двигателя имеет место повышенное потребление электрической энергии из питающей сети, затрачиваемое не только на преодоление приложенного к валу тормозного момента и покрытие потерь в самой асинхронном двигателе, но и на сообщение движущимся звеньям производственного агрегата определенной кинетической энергии. Поэтому при пуске асинхронный двигатель должен развить повышенный вращающий момент. Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению sп= 1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора. Так, при замкнутых контактах ускорения У1, У2, т. е. при пуске асинхронного двигателя с замкнутыми накоротко контактными кольцами, начальный пусковой момент Мп1 = (0, 5 -1, 0) Мном, а начальный пусковой ток Iп = (4, 5 - 7) Iном и более.
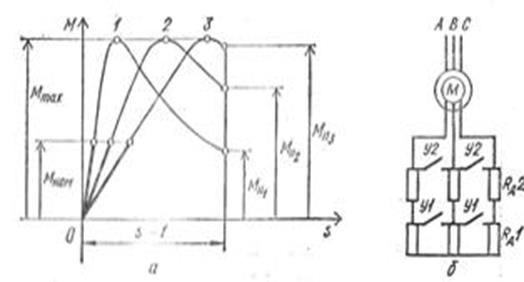
Рис. 1. Пуск трехфазного асинхронного двигателя с фазным ротором: а — графики зависимости вращающего момента двигателя с фазным ротором от скольжения при различных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора.
Малый начальный пусковой момент асинхронного электродвигателя с фазным ротором может оказаться недостаточным для приведения в действие производственного агрегата и последующего его ускорения, а значительный пусковой ток вызовет повышенный нагрев обмоток двигателя, что ограничивает частоту его включений, а в маломощных сетях приводит к нежелательному для работы других приемников временному понижению напряжения. Эти обстоятельства могут явиться причиной, исключающей использование асинхронных двигателей с фазным ротором с большим пусковым током для привода рабочих механизмов. Введение в цепь ротора двигателя регулируемых резисторов, называемых пусковыми, не только снижает начальный пусковой ток, но одновременно увеличивает начальный пусковой момент, который может достигнуть максимального момента Mmax (рис. 1, а, кривая 3), если критическое скольжение двигателя с фазным ротором
sкр = (R2' + Rд') / (Х1 + Х2') = 1, где Rд' — активное сопротивление резистора, находящегося в фазе обмотки ротора двигателя, приведенное к фазе обмотки статора. Дальнейшее увеличение активного сопротивления пускового резистора нецелесообразно, так как оно приводит к ослаблению начального пускового момента и выходу точки максимального момента в область скольжения s > 1, что исключает возможность разгона ротора.
Необходимое активное сопротивление резисторов для пуска двигателя с фазным ротором определяют, исходя из требований пуска, который может быть легким, когда Мп = (0, 1 - 0, 4) Mном, нормальным, если Мп — (0, 5 - 0, 75) Мном, и тяжелым при Мп ≥ Мном. Для поддержания достаточно большого вращающего момента двигателем с фазным ротором в процессе разгона производственного агрегата с целью сокращения длительности переходного процесса и снижения нагрева двигателя необходимо постепенно уменьшать активное сопротивление пусковых резисторов. Допустимое изменение момента в процессе разгона M(t) определяется электрическими и механическими условиями, лимитирующими пиковый предел момента М > 0, 85Ммах, момент переключения М2 > > Мс (рис. 2), а также ускорение.
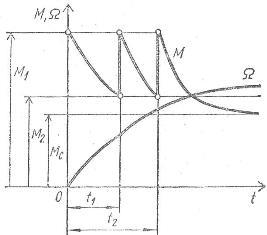
Рис. 2. Пусковые характеристики трехфазного асинхронного двигателя с фазным ротором
Переключение пусковых резисторов обеспечено поочередным включением контакторов ускорения Y1, Y2 соответственно в моменты времени t1, t2 отсчитываемые с момента пуска двигателя, когда в процессе разгона вращающий момент М становится равным моменту переключения М2. Благодаря этому на протяжении всего пуска все пиковые моменты получаются одинаковыми и все моменты переключения равны между собой.
Поскольку вращающий момент и ток асинхронного двигателя с фазным ротором взаимно связаны, то можно при разгоне ротора установить пиковый предел тока I1 = (1, 5 - 2, 5) Iном и ток переключения I2, который должен обеспечить момент переключения М2 > Мc.
Управление в функции тока реализуется применением реле минимального тока. Эти реле включают контактор ускорения при снижении пускового тока до значения тока переключения.
Общие положения о расчете мощности электродвигателя. Перегрузочная способность различных типов двигателя.
Существует много механизмов, работающих продолжительно с неизменной или мало меняющейся нагрузкой без регулирования скорости, например насосы, компрессоры, вентиляторы и т.п. При выборе электродвигателя для такого режима необходимо знать мощность, потребляемую механизмом. Если эта мощность неизвестна, ее определяют теоретическими расчетами или расчетами по эмпирическим формулам с использованием коэфф- ициентов, полученных из многочисленных опытов. Для малоизученных механизмов необходимую мощность определяют путем снятия нагрузочных диаграмм самопишущими приборами на имеющихся уже в эксплуатации аналогичных установках либо путем использования нормативов потребления энергии, полученных на основании статистических данных, учитывающих удельный расход электроэнергии при выпуске продукции. При известной мощности механизма мощность электродвигателя выбирается по каталогу с учетом КПД промежуточной передачи. Расчетная мощность на валу электродвигателя: 
где  - мощность, потребляемая механизмом;
- мощность, потребляемая механизмом;  - КПД передачи.
- КПД передачи.
Номинальная мощность электродвигателя, принятого по каталогу, должна быть равна или несколько больше расчетной.
Выбранный электродвигатель не нуждается в проверке по нагреву или по перегрузке, так как завод-изготовитель произвел все расчеты и испытания, причем основанием для расчетов являлось максимальное использование материалов, заложенных в электродвигателе при его номинальной мощности. Перегрузочная способность электродвигателя определяется характеристикой зависимости между сверхтоком и допускаемым временем его прохождения:
t = T (a-1) / (k-1)
где t - допустимая длительность перегрузки, с; Т - постоянная времени нагрева, с; а - коэффициент, зависящий от типа изоляции электродвигателя, а также периодичности и характера сверхтоков (для асинхронных электродвигателей в среднем а = 1, 3); к - кратность сверхтока, т. е. отношение тока электродвигателя Iд к Iном
k = Iд / Iном
Защиту электродвигателей, подверженных технологической перегрузке, желательно иметь такой, чтобы она, с одной стороны, защищала от недопустимых перегрузок, а с другой - давала возможность наиболее полно использовать перегрузочную характеристику электродвигателя с учетом предшествовавшей нагрузки и температуры окружающей среды. Наилучшей характеристикой РЗ от сверхтоков являлась бы такая, которая проходила несколько ниже перегрузочной характеристики. Защита с тепловым реле. Лучше других могут обеспечить характеристику, приближающуюся к перегрузочной характеристике электродвигателя, тепловые реле, которые реагируют на количество тепла Q, выделенного в сопротивлении его нагревательного элемента. Тепловые реле выполняются на принципе использования различия в коэффициенте линейного расширения различных металлов под влиянием нагревания. Основой такого теплового реле является биметаллическая пластина. состоящая из спаянных по всей поверхности металлов а и б с сильно различающимися коэффициентами линейного расширения. При нагревании пластина прогибается в сторону металла с меньшим коэффициентом расширения и освобождает защелку рычага, который, поворачиваясь, под действием пружины вокруг оси, замыкает контакты реле. Нагревание пластины осуществляется нагревательным элементом 6 при прохождении по нему токаТепловые реле сложны в обслуживании и наладке, имеют различные характеристики отдельных экземпляров реле, часто не соответствуют тепловым характеристикам электродвигателей и имеют зависимость от температуры окружающей среды, что приводит к нарушению соответствия тепловых характеристик реле и электродвигателя. Поэтому тепловые реле следует применять лишь в тех случаях, когда более простые токовые реле не обеспечивают защиты двигателей. Защита от перегрузки с токовыми реле. Для защиты электродвигателей от перегрузки обычно применяются МТЗ с использованием реле с ограниченно зависимыми характеристиками типа РТ-80 или МТЗ с независимыми токовыми реле и реле времени