Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Принцип работы
|
|
Процесс производства проката осуществляется в несколько стадий, каждая из которых включает следующие основные технологические операции:
· подготовка метала к прокатке;
· нагрев метала перед прокаткой(при горячей прокатке);
· прокат метала;
· отделка метала
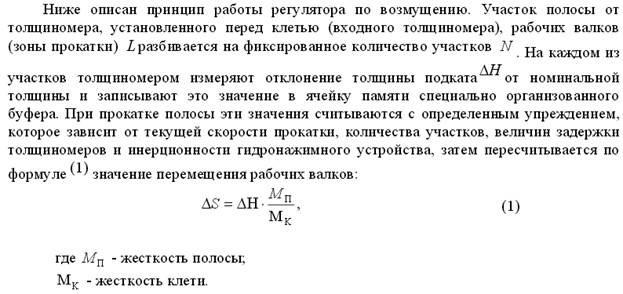
Процесс прокатки происходит по следующему принципу: участок полосы от толщиномера, установленного перед клетью (входного толщиномера), рабочих валков (зоны прокатки) L разбивается на фиксированное количество участков N. На каждом из участков толщиномером измеряют отклонение толщины подкатаΔ H от номинальной толщины и записывают это значение в ячейку памяти специально организованного буфера. При прокатке полосы эти значения считываются с определенным упреждением, и которое зависит от текущей скорости прокатки, количества участков, величин задержки толщиномеров и инерционности гидронажимного устройства.
Требования к надежности:
Средняя наработка на отказ, не менее 20000 ч
Средняя наработка на сбой, не менее 5000 ч
Среднее время на восстановление работоспособности, менее 2 ч
Средний срок службы с учетом проведения восстановительных
работ, не менее 10 лет
Коэффициент технического использования, не менее 0.95
Условия эксплуатации:
Климатическое исполнение и категория изделия – УХЛ4.2.
Температура окружающего воздуха от -45 до +40 º C
Относительная влажность (при 35º C) от 40 до 90%
Атмосферное давление от 84 до 107 кПа
Группа исполнения изделия по стойкости к механическим факторам – М1.
Диапазон вибрационных нагрузок от 1 до 35 Гц
Амплитуда ускорения 5 м/с2
Принципиальная схема реверсивного стана холодной прокатки с АСРТ
полосы показананарисунке1.Станимеетвалковуюсистемупосхеме1-2-3-4, намоточноеисматывающееустройства.ВсоставАСРТвходят: два
измерителятолщины–ИТ1иИТ2 –навходеинавыходеизклети;
датчикиугловыхперемещенийBR1, BR2, установленныенавалках;
гидравлическоенажимноеустройство(ГНУ), штокицилиндровкоторого
кинематическисвязаныссистемойвалковдлясозданиятребуемогоусилияпрокатки.


Важнейшей составной АСРТ является гидронажимное устройство (ГНУ), быстрота срабатывания и точность отработки сигналов которого в конечном итоге определяют качество прокатанной полосы.
Привод валков состоит из пропорциональногогидрораспределителя и двух вертикально расположенных гидроцилиндров (см. рисунок 1).

Схемагидронажимного устройства и рассмотрим нагрузки, действующие на ГЦ. На шток гидроцилиндра действуют нагрузки, которые могут быть разделенына инерционную, позиционную и трение

Инерционнаянагрузканаприводсоздаетсямассамиперемещаемыхсускорениемчастейрегулирующегооргана. Массыперемещаемыхприводомчастейзаменяютприведеннойкнаправлениюдвижениявыходногозвенамассой. Связьвыходногозвенаприводасрегулирующиморганомобъектауправленияобладаетупругостьюссв.
Позиционная нагрузка характеризуется зависимостью усилий, преодолеваемых приводом при управлении регулирующим органом объекта, от положения выходного звена привода. Часто позиционная нагрузка принимается в виде линейной зависимости усилия (силы или момента) от положения выходного звена привода.
Силытрениянагружаютприводивозникаютвследствиедвижениярегулирующегоорганавокружающейсреде. Зависимостисилтренияотскорости V элементамогутбытьдостаточносложными.
Составимуравнениягидропривода, предполагая, чтопитаниеегожидкостьюосуществляетсяотисточникаснеограниченнымрасходомприpп = const. Трубопроводбудемсчитатьнастолькокоротким, чтоволновыепроцессынеучитываются.СогласновторомузаконуНьютона, уравнениедвижениягидроцилиндра:
 (1)
(1)
 гдеpн = p1– p2 - перепаддавлениявполостяхгидроцилиндраиз-задействиянагрузки;
гдеpн = p1– p2 - перепаддавлениявполостяхгидроцилиндраиз-задействиянагрузки;
(PТР)Ц - силатрения, приложеннаякпоршнюгидроцилиндра;
z и zm - координаты, определяющиеположениепоршняимассы m;
mП - массапоршняиштокагидроцилиндра;
FЦ - рабочаяплощадьпоршнягидроцилиндра.
 Уравнениенагрузкинаштокгидроцилиндра:
Уравнениенагрузкинаштокгидроцилиндра:
(2)
(PТР) - силатрения, действующаяввиденагрузкисосторонырегулирующегооргана, управляемогоприводом.
Пригидравлическомтрении:

(3)
гдеkТР= nPvtgα = - определяетсяпохарактеристикам, указаннымв [1];
nPv- коэффициентмасштабов.
 Сучетомпоследнего, имеем:
Сучетомпоследнего, имеем:
m  (4)
(4)
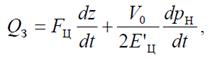
Поуравнениюрасходовнайдемскоростьдвиженияпоршнягидроцилиндрасучетомсжимаемостижидкостииупругостиегоопоры. Присмещениизолотникавлевоотнейтральногоположениявверхнююполостьгидроцилиндрапоступаетжидкостьсмассовымрасходом (безучетаутечекизполости):
 (5)
(5)
гдеρ 1 - плотностьжидкостивверхнейполостигидроцилиндра;
Q1 - объемныйрасходжидкости, втекающийвверхнююполостьгидроцилиндра;
V1 - объемжидкости, заключенныйвверхнейполостигидроцилиндра;
V1ТР - объемжидкостивтрубопроводе, соединяющемзолотниковыйраспределительсверхнейполостьюгидроцилиндра.
 Продифференцируемпоследнееуравнениеиполучим:
Продифференцируемпоследнееуравнениеиполучим:
(6)
 гдеBж1 - модульобъемнойупругостижидкостивверхнейполостигидроцилиндра.
гдеBж1 - модульобъемнойупругостижидкостивверхнейполостигидроцилиндра.
 ОбъемV1ТРсчитаемпостояннымиуравнение (6) приводимквиду:
ОбъемV1ТРсчитаемпостояннымиуравнение (6) приводимквиду:
(7)
ОбъемV1полостигидроцилиндраизменяетсявследствиеперемещенияпоршняисамогогидроцилиндраиз-заупругостиегоопоры:
 (8)
(8)
гдеdzЦ - координата, определяющаяположениягидроцилиндраотносительновнешнейопоры.
Массойгидроцилиндраможнопренебречь. Следовательно, дляприращенийдействующихнанегосил, записываемуравнение:
 (9)
(9)
Сучетом (8) и (9) соотношение (7) дляверхнейполостигидроцилиндраприметследующийвид:

 (10)
(10)
Иуравнениерасходажидкостидлянижнейполостигидроцилиндра:
(11)
где BЖ2 - модульобъемнойупругостижидкостивнижнейполостигидроцилиндра.
Прирассмотрениитакогоположениягидроцилиндра, когдаобъемы V1и V2можнопринятьпостояннымииравными V0 - половиневсегообъема
гидроцилиндра, возможнозначительноеупрощениесистемыуравнений. Крометого, допустимосчитать, что:
 (12)
(12)
 Когдапозиционнаянагрузкиприуказанномположениипоршняравнанулю, давлениявполостяхгидроцилиндраблизкикзначению (pП–pСЛ) / 2, чтопозволяетпрималыхсодержанияхнерастворенноговоздухавжидкостиполагать:
Когдапозиционнаянагрузкиприуказанномположениипоршняравнанулю, давлениявполостяхгидроцилиндраблизкикзначению (pП–pСЛ) / 2, чтопозволяетпрималыхсодержанияхнерастворенноговоздухавжидкостиполагать:
(13)
 Тогда:
Тогда:
(14)
Сучётомсказанногопросуммируемвыражения (10) и (11), получим:
 (15)
(15)
где E'Ц - приведенныймодульупругостигидроцилиндрасупругойопорой.
 (16)
(16)

 При сОП ∞:
При сОП ∞:
(17)
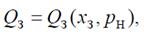 Расходжидкости Q3являетсянелинейнойфункциейперемещениязолотника x3иперепададавленияpН:
Расходжидкости Q3являетсянелинейнойфункциейперемещениязолотника x3иперепададавленияpН:
(18)
Расчетнелинейнойсистемыуравнений (1)-(18) достаточносложен. Припромышленнойнастройкесистемынеобходимополучитьдостаточноточныечисловыезначениянеизвестныхкоэффициентовуравнений, которыенеобходимыдляэффективногоиспользованияданноймодели.
Однако, возможнополучитьлинейнуюматематическуюмодельданнойсистемывмалыхотклоненияхпутемлинеаризациисогласнометодике [1].
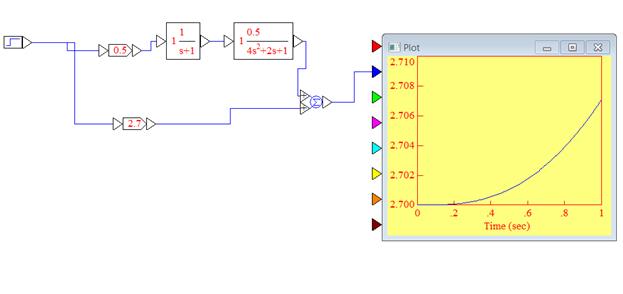
Структураполученноймоделипоказананарисунке3. Систематретьегопорядкавотклоненияхописываетработугидроприводасдроссельнымрегулированием.
Структурная схема:

 - передаточная функция дросселя, представленного в виде интегрирующего звена;
- передаточная функция дросселя, представленного в виде интегрирующего звена;
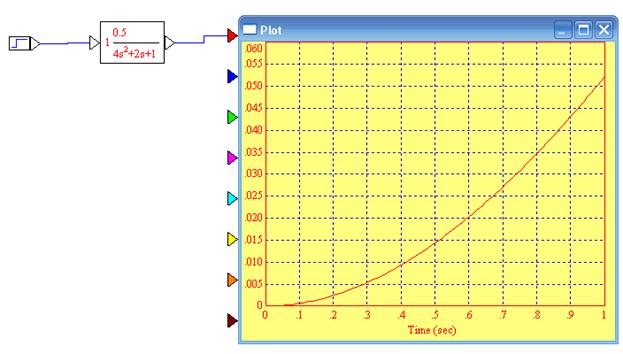
 – передаточная функция цилиндра;
– передаточная функция цилиндра;
KЗ, KOC– коэффициенты пропорциональности;
Δ hОТКЛ – отклонение толщины подката от номинального значения, м;
Δ ХМ – перемещение обобщенной координаты приведенной массы;
S - операторЛапласа.
 Период срабатывания дросселя TГп=1с.
Период срабатывания дросселя TГп=1с.
WДР=
K3= 
где Umax – максимальное напряжение на выходе датчика,
Pmax- соответствующая давление цилиндра.
Umax=20B;
Pmax=40Bт;
Для приведения к безразмерному виду заменяем:

где  =1кПа;
=1кПа;
где  =1В;
=1В;
 Тогда
Тогда
K3=
KОС= e- sτ
Tц=2с
Тогда:
W(p)= 
Передаточная функция дросселя

Общая передаточная функция
|