Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Замкнутая система ЭП с обратной связью по скорости.
|
|
Замкнутые структуры электроприводов строятся по принципу компенсации возмущения и отклонения (по принципу обратной связи). Пример автоматического регулирования скорости по отклонению с ОС по скорости показан на рис. 1, где приняты следующие обозначения: Uoc=kocω — сигнал обратной связи, который вычитается из Uз.с; U∆ — суммарный сигнал управления, который автоматически изменяется в зависимости от рассогласования сигнала задания скорости и сигнала ОС и с помощью системы управления электроприводом устраняет отклонение скорости.


Обратные связи, применяемые в электроприводе, делятся на положительные и отрицательные, жесткие и гибкие, линейные и нелинейные.
Положительной называется такая ОС, сигнал которой направлен согласно (складывается) с заданием, в то время как сигнал отрицательной ОС направлен встречно ему.
Жесткая ОС действует в установившемся и переходном режимах работы электропривода. Сигнал гибкой ОС вырабатывается только в переходных режимах и служит для обеспечения требуемого их качества, например устойчивости движения, допустимого перерегулирования и т.д.
Линейная ОС характеризуется пропорциональной зависимостью между регулируемой координатой и сигналом обратной связи; при реализации нелинейной зависимости эта связь нелинейна.
В зависимости от вида регулирования координаты в электроприводе применяются ОС по скорости, положению, току, напряжению, моменту и т.д.
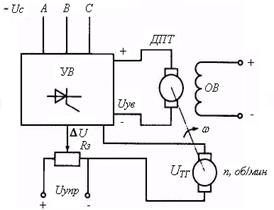
В замкнутой системе регулирования скорости ДПТ НВ (рис. 4) тахогенератор включен в цепь управления УВ последовательно с управляющим напряжением Uупр, в результате чего образуется отрицательная обратная связь по скорости. Ток, создаваемый тахогенератором, направлен встречно току управления, и в цепи управления действует разность напряжений, UТГ — напряжение тахогенератора, пропорциональное частоте вращения вала ДПТ.
Потенциометром (задатчиком) R3 устанавливается такое значение ∆ U, при котором обеспечивается необходимая частота вращения. В дальнейшем система автоматически поддерживает с определенной погрешностью заданную частоту вращения. Так, при возрастании момента сопротивления на валу ДПТ его скорость уменьшается, что приводит к уменьшению ЭДС тахогенератора; при этом ∆ U возрастает и увеличивает выходное напряжение U УВ управляемого выпрямителя. Соответственно возрастают напряжение на якоре ДПТ и частота его вращения. Процесс возрастания скорости будет продолжаться тех пор, пока ∆ U и скорость вала двигателя не достигнут заданных значений. Аналогичные процессы происходят при уменьшении нагрузки на валу.

Замкнутая схема управления АД, выполненным по схеме ти ристорный регулятор напряжения — электродвигатель позволяет регулировать скорость АД с повышенным скольжением (такие двигатели применяются в вентиляционных установках сельскохозяйственного назначения). Рассмотрим схему регулирования скорости АД с помощью тиристорного регулятора напряжения (ТРН) (рис. 3). В цепь статора включены три пары встречно-параллельно соединенных тиристоров VS1...VS6, образующих силовую часть ТРН. Управляющие электроды тиристоров подсоединены к выходам СИФУ, которая распределяет управляющие импульсы на все тиристоры и осуществляет их фазовый сдвиг относительно сетевого напряжения в зависимости от управляющего сигнала Uупр. Свалом АД механически связан вал тахогенератора. ЭДС тахогенератора ЕТГ сравнивается с задающим напряжением U 3, снимаемым с задающего потенциометра скорости. Разность U 3 и ЕТГ, равная напряжению управления (Uупр = U 3 - ЕТГ), поступает на вход СИФУ. При увеличении этого сигнала угол управления тиристорами уменьшается, а напряжение, приложенное к статору, увеличивается.
При увеличении нагрузки на валу АД его скорость уменьшается. Соответственно уменьшается и ЭДС тахогенератора ЕТГ. Уменьшение ЕТГ приводит к увеличению Uупр и уменьшению угла управления, в результате чего подаваемое на АД напряжение увеличивается. Момент двигателя возрастает, снижение скорости будет небольшим, т.е. жесткость механической характеристики АД благодаря отрицательной ОС по скорости увеличится. При уменьшении момента нагрузки напряжение на статоре автоматически снижается, в результате чего скорость привода будет поддерживаться на заданном уровне.

