Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Кинематическая схема рабочей машины, ее описание и технические данные
|
|
Содержание
Введение……………………………………………………………..……………
1. Кинематическая схема рабочей машины, ее описание
и технические данные ……………………………………………………………
2. Расчет нагрузочной диаграммы рабочей машины………………………….
3. Предварительный расчет мощности электродвигателя и его выбор……….
4. Расчет приведенных статических моментов и моментов инерции системы
электрический двигатель-рабочая машина………………………………………
5. Расчет приближенной нагрузочной диаграммы электродвигателя………..
6. Предварительная проверка двигателя по нагреву…………………………..
7. Выбор системы электропривода и его структурная схема…………….……
8. Расчет и построение естественных механической и электромеханической
характеристик электродвигателя…………………………………………….…..
9. Построение пусковой и тормозной диаграмм двигателя. Расчет
пусковых и тормозного сопротивлени………………………………..………....
Заключение……………………………………………………………….…….
Список использованных источников…………………………………..…….
Введение
Создание материально-технической базы общества, решение глобальных экономических и социальных задач общества невозможны без полной электрификации всех отраслей народного хозяйства. Осуществлённые на её основе автоматизация и комплексная механизация производственных и технологических процессов позволяет резко повысить производительность труда.
Важную роль в реализации этих планов играет электрический привод, который является основным видом привода самых разнообразных производственных и транспортных механизмов, бытовых приборов, устройств водо- и газоснабжения, средств телевизионной и космической техники и т. д.
Главенствующее место электропривода среди других возможных видов привода определяется возможностью изготовления электродвигателей на самые разнообразные мощности и скорости, возможностью с помощью простых средств реализовать разнообразные и сложные виды движения исполнительных органов, также высоким КПД, надёжностью в эксплуатации.
Кинематическая схема рабочей машины, ее описание и технические данные
Рассчитать электропривод подъемной лебедки крана, кинематическая схема которого представлена на рисунке 1, построить характеристики, выбрать и оценить правильность подбора электродвигателя.
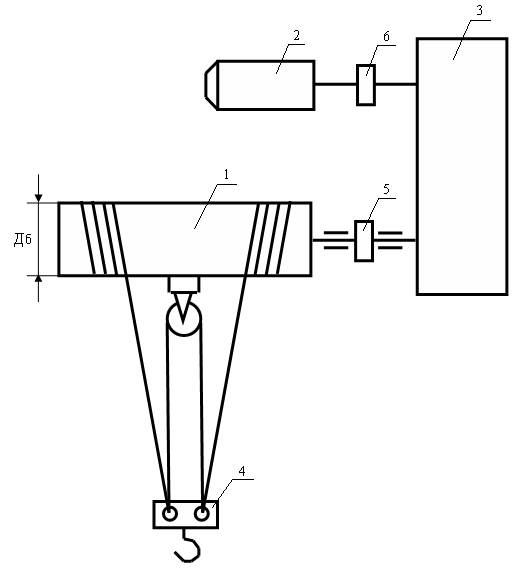
1 – барабан подъемной лебедки; 4 – крюковая подвеска;
2 – двигатель; 5 – муфта;
3 – редуктор; 6 – тормоз.
Рисунок 1 – Кинематическая схема механизма подъема
Технические данные механизма (вариант 20):
масса груза mгр, т …………………………………………………………. 25;
масса грузозахватывающего устройства mгру, т ………………………...0, 25;
высота подъема L, м …………………...…………………………………. 10;
скорость подъема груза Vср, м/с …………………….…………………… 0, 2;
допустимое ускорение a, м/с2……………………………………………. 0, 3;
число циклов в час Z, 1/ч ………………………………………….. 300;
диаметр барабана Dк, м ……………………….……...………………..0, 335;
общий КПД механизма ………………..…………………………………. 0, 7;
продолжительность включения ПВ …………………………………..… 35;
двигатель переменного тока.