Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Динамограми роботи свердловинних штангових насосних установок. 1.7.1 Зрівноваження приводів штангового свердловинного насоса
|
|
План
1.7.1 Зрівноваження приводів штангового свердловинного насоса. Призначення. Критерії врівноваженості
1.7.2 Умови і способи зрівноваження.
1.7.3 Визначення потужності приводу верстатів-качалок
1.7.4 Перевірка працездатності насосних штанг
1.7.5 Кінематичний та силовий аналіз роботи приводу свердловинних штангових насосних установок
Динамограми роботи свердловинних штангових насосних установок
Список використаної літератури
1) Молчанов Г.В., Молчанов А.Г. Машины и оборудование для добычи нефти и газа. Учебник для вузов. – М.: Недра, 1984, 464 с.
2) Справочник по нефтепромысловому оборудованию/ Под ред. Е.Н.Бухаленко. – М.: Недра, 1990. - 550 с.
3) Молчанов Г.В., Чичеров Л.Г. Нефтепромысловые машины и механизмы. – М.: Недра, 1983. – 308 с.
4) Костриба І.В. Нафтопромислове обладнання. Задачі, вправи: Навчальний посібник. – К.: ІЗМН, 1996. – 432 с.
5) Світлицький В.М., Кривуля С.В., Матвієнко А.М., Коцаба В.І. Машини та обладнання для видобування нафти і газу: Довідковий посібник. — Харків «КП «Міська друкарня»», 2014 р. – 352 с.
1.7.1 Зрівноваження приводів штангового свердловинного насосА. Призначення. критерії врівноваженості
Найбільше поширення як у вітчизняній, так і закордонній нафтовидобувній промисловості одержали механічні приводи свердловинного штангового насоса. Їхньою особливістю є використання механічного перетворювача, що призначений для перетворення обертального руху вала приводного двигуна в зворотно-поступальний рух точки підвісу штанг, а також застосування механічної трансмісії. Крім того, для них характерне використання механічного зв'язку привода, що врівноважує, із силовим органом, що забезпечує переміщення точки підвісу штанг.
Основне призначення пристрою, що врівноважує – накопичення потенційної енергії при ході штанг вниз і віддавання її при ході штанг нагору. При цьому потенційна енергія, що віддається, перетворюється в роботу, яка разом із роботою, котра виконується приводним двигуном, витрачається на переміщення точки підвісу штанг нагору.
Завдання зрівноважування привода свердловинного насоса зводяться до визначення таких параметрів врівноважуючого пристрою, що залежно від умов роботи установки дозволили б створити оптимальний режим роботи двигуна і забезпечили б прийнятні енергетичні показники установки.
Балансирний верстат-качалку врівноважують вантажами, які розміщуються на балансирі або кривошипі.
При виборі мас вантажів оптимальне врівноваження досягається за наступних умов:
– робота, що робиться привідним двигуном при ході штанг нагору і вниз протягом одного подвійного ходу, постійна;
– середньоквадратичне відхилення тангенційного зусилля від його середнього значення за час подвійного ходу є мінімальним;
– максимальні тангенціальні зусилля при ході штанг нагору і вниз рівні.
1.7.2 УМОВИ І СПОСОБИ ЗРІВНОВАЖЕННЯ
Відомі індивідуальні механічни приводи й групові приводи для експлуатації декількох свердловин.
Приводи першого типу (рисунок 1.7.1) містять двигун, трансмісію і перетворюючий механізм та забезпечують рух тільки однієї колони насосних штанг. У даний час майже всі приводи штангового свердловинного насоса належать до цього типу.
Групові приводи призначені для експлуатації групи (від 2) свердловин, розташованих близько одна від одної і володіючих порівняно рівними параметри. В більшості випадків груповий привід використовується для експлуатації малодебітних свердловин. У даний час на території нашої країни такий тип привода практично не застосовується, хоча перспективи розвитку даного типу обладнання досить значні.
Існують різні способи зрівноважування двоплічних балансирних верстатів-качалок. Вони наведені на рисунку 1.7.1.
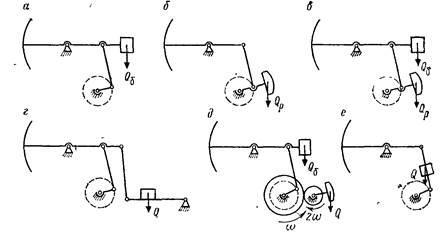
Рисунок 1.7.1 – Способи механічного зрівноважування двоплечних балансирних верстатів-качалок:
а – балансирне зрівноважування; б – кривошипне (роторне) зрівноважування, в – комбіноване зрівноважування; г – зрівноважування за допомогою помилкової качалки; д – зрівноважування противагою, що обертається з подвійною частотою, е – шатунне зрівноважування
Верстати-качалки з двохплічним балансиром виконуються за кінематичною схемою, наведеною на рисунку 1.7.1. При цьому у двоплічних верстатів-качалок балансирного типу опора балансира знаходиться між голівкою балансира і точкою з’єднання балансира із шатуном.
Зусилля до балансира можуть передаватися декількома способами. Найбільш часто для цього використовуються два шатуни, з'єднані з балансиром траверсою.
Існують також одноплічні верстати-качалки (рисунок 1.7.2).
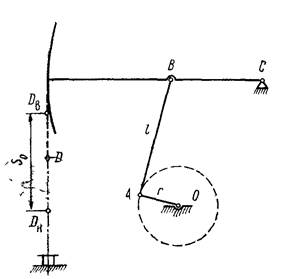
Рисунок 1.7.2 – Кінематична схема одноплічного балансирного верстата-качалки
На рисунку 1.7.3 наведені способи механічного зрівноважування одноплічних балансирних верстатів-качалок.
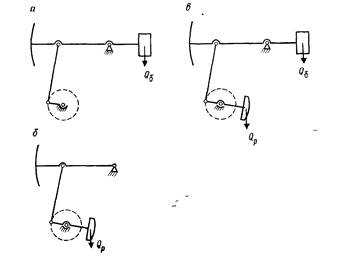
Рисунок 1.7.3 – Способи механічного зрівноважування одноплічних балансирних верстатів-качалок:
а – балансирне зрівноважування, б – кривошипне зрівноважування (роторне); в– комбіноване зрівноважування
Існує також пневматичний урівноважуючий пристрій (рисунок 1.7.4), який добре вписується в кінематичну схему верстата-качалки і має кращі вагові й ергономічні показники. Проте пневматичні врівноважуючі пристрої не дістали розповсюдження через порівняно складнішу ніж у вантажних врівноважуючих пристроях, конструкцію, схильність до нагрівання, менший міжремонтний цикл та необхідність спеціальної кваліфікації обслуговуючого персоналу.
Найбільш досконалі конструкції пневматичних пристроїв, що врівноважують, виконуються у вигляді моноблока, що поєднує в собі пневмоциліндр із гідравлічним затвором, ресивер, компресор, масляний компенсаційний насос, ємність із запасом масла і контрольно-вимірювальну апаратуру.
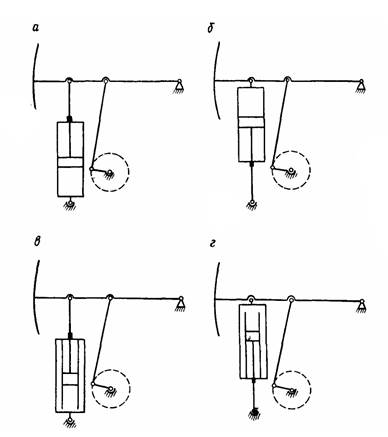
Рисунок 1.7.4 – Способи пневматичного зрівноважування балансирних верстатів-качалок: а – з рухливим поршнем без гідравлічного затвора, б – із рухливим циліндром без гідравлічного затвора; в – із рухливим поршнем і гідравлічним затвором; г – із рухливим циліндром із гідравлічним затвором
Існують також і конструкції безбалансирних верстатів-качалок.
Переміщення колони насосних штанг у безбалансирних верстатах-качалках забезпечується за допомогою гнучкої ланки – декількох канатів, що з'єднують кривошипи редуктора з траверсою, до якої підвішений гирловий шток. Кривошипи безбалансирних верстатів-качалок мають Y-подібну форму.
Одна з конструкцій безбалансирного привода наведена на рисунку 1.7.5.
Такий верстат-качалка (рисунок 1.7.5) складається з рами 1, стійки 2, канатних шківів 3, кривошипів із противагою 4, траверси із шатунами 5, редуктора 6, гальма 7, клинопасової передачі з електродвигуном 8, підвіски гирлового штока 9. Гирлове устаткування те ж, що й у балансирних верстатах-качалках.
Основні вузли приводів – редуктор, гальмо, канатна підвіска, вузол кріплення електродвигуна, противаги – уніфіковані з балансирними верстатами-качалками.
Зрівноважування подібних безбалансирних верстатів-качалок роторне, здійснюється переміщенням вантажів, установлених на кривошипах, з однієї сторони.
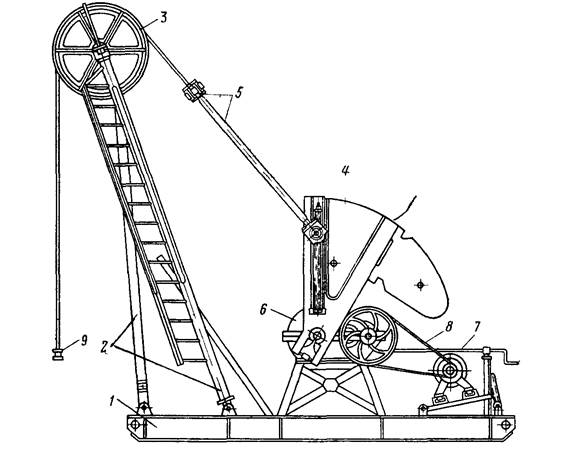
Рисунок 1.7.5 – Безбалансирний верстат-качалка
Для досягнення великої довжини ходу штанг (до 10 м) застосовуються спеціальні довгоходові приводи (рисунок 1.7.6). Така установка складається зі сталевої ферми 6, установленої біля устя свердловини. На верхній площадці ферми поміщений привідний двигун із реверсивним редуктором 4, на вихідному валу якого встановлені барабани. Керування двигуном здійснюється станцією 7. Гирловий шток 2 розташований у зовнішній грані ферми і з'єднаний канатною підвіскою 3 з одним із барабанів, на інший барабан намотується канат, до якого підвішений урівноважуючий вантаж 5, який переміщується всередині ферми. В ряді установок застосовуються барабани, що мають на крайніх струмках перемінний радіус, що дозволяє забезпечити зміну швидкості точки підвісу штанг за бажаним законом у період їхнього реверсування.
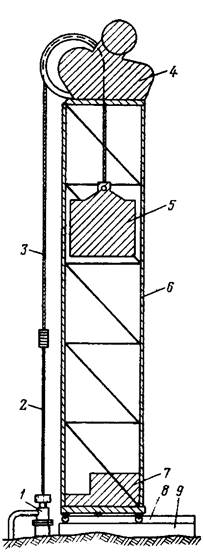
Рисунок 1.7.6 – Безбалансирний довгоходовий верстат-качалка
Крім описаних, відома велика кількість інших кінематичних схем верстатів-качалок, але вони не знайшли застосування в силу їхньої складності чи низької надійності.
1.7.3 Визначення потужності привода верстатів - качалок
Потужність електродвигунів для верстатів-качалок може бути визначена за різними формулами, із яких найбільше застосування мають формули Д. В. Єфремова, „Азінмашу“ й АзНІІ.
Розрахунок за формулою Д. В. Єфремова. Необхідна потужність двигуна, кВт, для балансирного верстата-качалки визначається за формулою

де  – діаметр плунжера, мм; s – довжина ходу полірованого штока, м; п – число подвійних ходів за хвилину; Н – висота підйому рідини (відстань від устя до динамічного рівня), м;
– діаметр плунжера, мм; s – довжина ходу полірованого штока, м; п – число подвійних ходів за хвилину; Н – висота підйому рідини (відстань від устя до динамічного рівня), м;  – відносна питома вага рідини;
– відносна питома вага рідини;  = 0, 85-0, 95 – ККД насосу;
= 0, 85-0, 95 – ККД насосу;  = 0, 8-0, 85 – ККД верстата-качалки;
= 0, 8-0, 85 – ККД верстата-качалки;  – коефіцієнт подачі насосної установки;
– коефіцієнт подачі насосної установки;  – коефіцієнт, що враховує ступінь урівноваженості верстата-качалки (приймається рівним =1, 2 для врівноваженої системи і =3, 4 для неврівноваженої системи).
– коефіцієнт, що враховує ступінь урівноваженості верстата-качалки (приймається рівним =1, 2 для врівноваженої системи і =3, 4 для неврівноваженої системи).
Розрахунок за формулами Азинмашу. Потужність двигуна в кВтвизначається за середньоквадратичним значенням тангенційних сил:
 (1.7.1)
(1.7.1)
або
 , (1.7.2)
, (1.7.2)
де  – втрати потужності холостого ходу верстата-качалки, кВт;
– втрати потужності холостого ходу верстата-качалки, кВт;  – теоретична продуктивність насоса в т/добу;
– теоретична продуктивність насоса в т/добу;  ,
,  , s і п мають зазначені вище значення і розмірність;
, s і п мають зазначені вище значення і розмірність;  – відносний коефіцієнт форми кривої обертального моменту на валу електродвигуна. Для верстатів-качалок із комбінованим зрівноважуванням
– відносний коефіцієнт форми кривої обертального моменту на валу електродвигуна. Для верстатів-качалок із комбінованим зрівноважуванням
 (1.7.3)
(1.7.3)
де  – відношення ваги балансирных вантажів до загальної ваги всіх противаг;
– відношення ваги балансирных вантажів до загальної ваги всіх противаг;
 (1.7.4)
(1.7.4)
де  і
і  – постійні коефіцієнти, що залежать від довжини пліч балансира і шатунів верстатів-качалок. Значення цих коефіцієнтів, а також розмір втрат Р холостого ходу, віднесених до одного хитання, даються в таблиці 1.7.1.
– постійні коефіцієнти, що залежать від довжини пліч балансира і шатунів верстатів-качалок. Значення цих коефіцієнтів, а також розмір втрат Р холостого ходу, віднесених до одного хитання, даються в таблиці 1.7.1.
Таблиця 1.7.1 – Значення коефіцієнтів , і Р для різних типорозмірів верстатів-качалок типу СКН
| Тип верстата-качалки |
|
| Р |
| СКН2-615 | 0, 6 | 1, 5 | 0, 01 |
| СКН3-915 (СКН3-1515) | 0, 26 | 1, 3 | 0, 02 |
| СКН5-1812 (СКН5-3015) | 0, 13 | 1, 0 | 0, 07 |
| СКН10-2115 (СКН10-3315) | 0, 12 | - | 0, 15 |
| СКН10-3012 | 0, 095 | - | 0, 16 |
Для верстатів-качалок із роторним зрівноважуванням  =0, а тому
=0, а тому
 . (1.7.5)
. (1.7.5)
Для верстатів-качалок із балансирним зрівноважуванням = 1. Тоді
 ; (1.7.6)
; (1.7.6)
 – поправковий коефіцієнт, що враховує вплив деформації штанг і труб на розмір середньоквадратичної потужності і залежить від відношення довжини плунжера до ходу полірованого штоку (таблиця 1.7.2).
– поправковий коефіцієнт, що враховує вплив деформації штанг і труб на розмір середньоквадратичної потужності і залежить від відношення довжини плунжера до ходу полірованого штоку (таблиця 1.7.2).
Таблиця 1.7.2 – Значення величини коефіцієнта від відношення довжини ходу плунжера до ходу полірованого штоку

| 0, 4 | 0, 5 | 0, 6 | 0, 7 | 0, 8 | 0, 9 | 1, 0 |

| 0, 55 | 0, 7 | 0, 8 | 0, 9 | 0, 95 | 0, 98 | 1, 0 |
де  – довжина ходу плунжера, м., визначається за формулою
– довжина ходу плунжера, м., визначається за формулою
 , (1.7.7)
, (1.7.7)
де L – глибина спуску насоса, м;  – площа перерізу плунжера, см2;
– площа перерізу плунжера, см2;  – площа перерізу насосних штанг, см2;
– площа перерізу насосних штанг, см2;  – площа перерізу тіла насосних труб, см2.
– площа перерізу тіла насосних труб, см2.
Розрахунок за формулою АзІІ (Б. М. Плюща, В. О. Саркисяна)
Потужність двигуна в кВт визначається за формулою
 , (1.7.8)
, (1.7.8)
де  = 0, 96-0, 98 – ККД передачі;
= 0, 96-0, 98 – ККД передачі;  – коефіцієнт, що залежить від типу верстата–качалки (таблиця 1.7.3).
– коефіцієнт, що залежить від типу верстата–качалки (таблиця 1.7.3).
Таблиця 1.7.3 – Значення коефіцієнта залежно від типу верстата-качалки
| Тип верстата-качалки | СКН2-615 | СКН3-915 | СКН5-1812 | СКН10-2115 | СКН10-3012 |
Величина коефіцієнта 
| 0, 02 | 0, 035 | 0, 1 | 0, 16 | 0, 22 |
 – коефіцієнт, значення якого визначаються за формулою
– коефіцієнт, значення якого визначаються за формулою
 ; (1.7.9)
; (1.7.9)
– коефіцієнт подачі насосної установки;
 – вага стовпа рідини в насосних трубах вище від динамічного рівня в кг.
– вага стовпа рідини в насосних трубах вище від динамічного рівня в кг.