Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Определение внешних сил
|
|
ЛЕКЦИЯ № 6
Силовой анализ
Задачи и методы силового анализа
Силовой анализ механизмов является одним из важных этапов их проектирования, поскольку силы, действующие на звенья механизма, необходимо знать при расчете на прочность, при подборе подшипников, при определении мощности электродвигателя и т.д.
Все силы, действующие на звенья механизма можно разделить на две группы:
а) внешние или активные силы, к которым относятся движущие силы (моменты), силы сопротивления движению, силы тяжести, силы инерции;
б) внутренние силы или силы реакций в кинематических парах.
Основными задачами силового анализа рычажных механизмов являются:
а) определение внешних сил, которые действуют на отдельные звенья механизма;
б) определение сил реакций в кинематических парах механизма;
в) определение необходимого движущего (уравновешивающего) момента.
Если при силовом анализе не учитываются силы инерции, то в этом случае пользуются методами статики, и такой расчет называют статическим.
Если при силовом анализе учитываются те динамические силы, которые возникают в результате движения механизма (силы инерции), то расчет называют динамическим. Если для выполнения динамического расчета применяют метод кинетостатики, основанный на принципе Даламбера, то такой расчет называют кинетостатическим.
Сущность этого метода может быть сформулирована так: если ко всем внешним действующим на звено силам условно присоединить силы инерции, то под действием всех этих сил звено можно рассматривать условно находящимся в равновесии.
Определение внешних сил
Движущие силы – это силы, развиваемые двигателем, необходимые для преодоления всех сил сопротивления. Эти силы приложены к ведущему звену, направление их совпадает с направлением движения звена, т.е. движущие силы совершают положительную работу +Адв (на отдельных этапах цикла это условие может быть нарушено).
Зависимость движущей силы от кинематических параметров называется механической характеристикой двигателя 

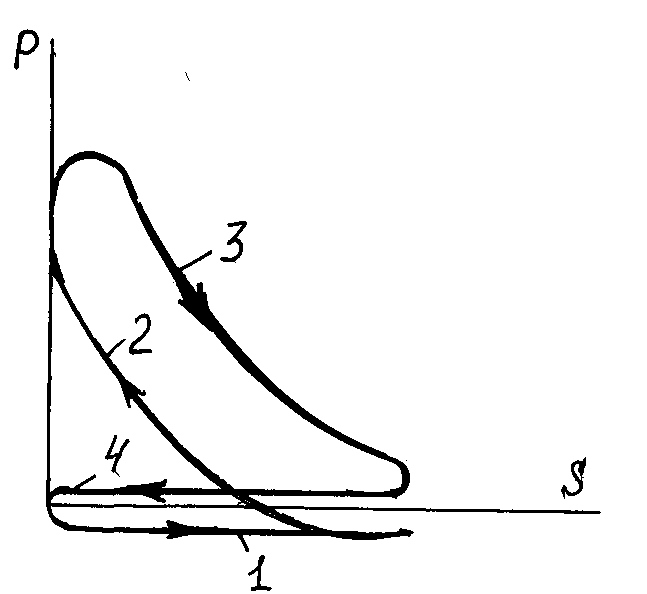
Рисунок 2.20 Рисунок 2.21
На рисунке 2.20 дана механическая характеристика асинхронного электродвигателя.
В рабочем режиме электродвигатели работают при номинальной угловой скорости -  и номинальном моменте – Мн.
и номинальном моменте – Мн.
У асинхронного электродвигателя разгон начинается по неустойчивой ветви механической характеристики – 1, от Мнач до Мкр. В первом приближении разгон по этой ветви описывают линейной зависимостью
 , где
, где  ,
,  .
.
Далее разгон продолжается по устойчивой ветви механической характеристики – 2, до установившегося режима работы – Мн. Устойчивая ветвь описывается уравнением
 , или
, или  ;
;
где  - скорость холостого хода электродвигателя (без нагрузки);
- скорость холостого хода электродвигателя (без нагрузки);
 - коэффициент крутизны механической характеристики.
- коэффициент крутизны механической характеристики.
На рисунке 2.21 дана индикаторная диаграмма четырехтактного двигателя внутреннего сгорания: 1 – такт всасывания рабочей смеси; 2 – сжатия; 3 – рабочий ход; 4 – выброс.
Силы сопротивления стремятся замедлить движение механизма. Их направление противоположно направлению движения, т.е. совершают отрицательную работу – Ас.
Силы сопротивления делятся на полезные технологического назначения и вредные (силы трения в кинематических парах).
Характеристики полезных сопротивлений машин представляют собой в основном восходящие кривые (центробежные насосы, компрессоры, вентиляторы). В курсовых проектах Fп.с. (Мп.с.). Заданы и по направлению и по величине.
Силы тяжести (силы веса) приложены в центрах тяжести (рисунок 2.22) и направлены вниз, Нунок 2.22) и направлены вниз, Н
 ,
,
где mi – масса звена i, кг;
g – ускорение свободного падения, м/с2.

Рисунок 2.22
Они производят положительную работу, когда центры тяжести звеньев опускаются, и отрицательную, когда центры тяжести звеньев поднимаются ±Атяж.
Силы инерции.
Результирующая сила инерции звена, Н
 ,
,
где mi – масса звена в кг;
aSi – вектор полного ускорения центра масс Si звена в м/с2.
Силы инерции звена приложены в его центре масс и направлены в сторону противоположную полному ускорению центра масс (которое находится из плана ускорения) (рисунок 2.28).
При плоско-параллельном движении, если вращение звена неравномерное, возникает момент пары сил инерции, направленный противоположно угловому ускорению  (рисунок 2.22), Нм
(рисунок 2.22), Нм
 ,
,
где JS2 – момент инерции звена относительно оси, проходящей через центр
масс S2, перпендикулярный плоскости движения, кг/м2;
 - угловое ускорение, 1/с2.
- угловое ускорение, 1/с2.
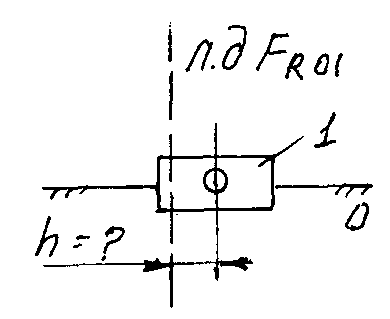
Силы трения – Ff всегда направлены в сторону противоположную движению (ползун на плоскости, рисунок 2.22). В курсовом проекте силу трения не учитываем.
2.3.3 Определение сил реакций в кинематических парах
В результате действия на звенья внешних сил в кинематических парах появляются силы реакции.

А) б)
Рисунок 2.23
Во вращательной кинематической паре V класса (рисунок 2.23а) результирующая сила реакции FR проходит через центр шарнира. Величина и направление этой реакции неизвестны. В поступательной паре (рисунок 2.23б) сила реакции перпендикулярна к оси движения этой пары, но неизвестны ее величина и точка приложения.
В любой группе Ассура имеем 6 неизвестных величин – величина и направление сил реакций в трех кинематических парах. Для плоской группы можно составить шесть уравнений статики – два уравнения проекций всех сил на координатные оси и одно уравнение моментов для каждого звена. Таким образом группы Ассура являются статическими определимыми и расчет начинают с группы наиболее удаленной от ведущего звена. Степень подвижности группы Ассура: W = 3n-2P1 = 3x2 – 2x3 = 0, т.е. система находится в равновесии.
Пример - Исходные данные:
- кинематическая схема механизма в заданном положении (рисунок 2.16а);
- планы скоростей и ускорений для этого положения (рисунки 2.16б, 2.16в);
- массы звеньев m2, m3 (кг);
- собственные моменты инерции звеньев относительно осей, проходящих через центра тяжестей JS2, JS3 (кгм2);
- момент полезного сопротивления Мпс (задан в задании на курсовой проект).
Момент полезного сопротивления заменяем парой сил полезного сопротивления, приложенных по концам ведомого звена перпендикулярно ему в направлении момента (рисунок 2.24)
 , Н.
, Н.
Силы веса  , Н и
, Н и  , Н.
, Н.
Силы инерции  , Н и
, Н и  , Н.
, Н.
Моменты пары сил инерции  , Нм,
, Нм,  , Нм.
, Нм.
Момент пары сил Мин2 и силу инерции Fин2 заменяем одной результирующей силой инерции  перенесенной параллельно из центра тяжести S2 на плечо
перенесенной параллельно из центра тяжести S2 на плечо 
 , м,
, м,  , мм.
, мм.
Перенесенная сила инерции  должна давать такой же по направлению момент относительно точки S2 как и момент Мин2.
должна давать такой же по направлению момент относительно точки S2 как и момент Мин2.
Аналогично переносим F ин3 на плечо  -
- 
 , м,
, м,  , мм.
, мм.
Для определения сил реакций в кинематических парах механизм разбиваем на группы.
Из рассматриваемого механизма выделим группу 2 кл. 2 пор. 1 вида и прикладываем к ней известные внешние силы. В точках А и О2 прикладываем неизвестные силы реакций: FR1.2 – со стороны первого звена на второе и FR03 – со стороны стойки на третье в произвольном направлении (рисунок 2.25).
Векторное уравнение сил

(две силы полезного сопротивления, Fnc действующие на звено 3 в векторном уравнении можно не учитывать, т.к. они компенсируют друг друга).
В этом уравнении силы реакции FR12 и FR03 известны только по точкам приложения и неизвестны по величине и по направлению. Внешние силы  известны по точкам приложения, по направлению и по модулю.
известны по точкам приложения, по направлению и по модулю.

Рисунок 2.24

Рисунок 2.25

Рисунок 2.26
Силы реакций  и
и  раскладываем на две составляющие нормальные (параллельно звеньям) и тангенциальные (перпендикулярно звеньям), которые становятся известны по точкам приложения и по линии действия
раскладываем на две составляющие нормальные (параллельно звеньям) и тангенциальные (перпендикулярно звеньям), которые становятся известны по точкам приложения и по линии действия
 .
.
Тангенциальные составляющие определяются по величине и по направлению из уравнений равновесия составленных отдельно для каждого звена относительно средней кинематической пары – точки В

Знаки ± определяют истинное направление  .
.
Векторное уравнение принимает вид
 .
.
Графически решаем векторное уравнение (строим план сил, рисунок 2.26) проводим линию действия силы  параллельно звену АВ. Из произвольной точки на этой линии откладываем вектор произвольной длины силы
параллельно звену АВ. Из произвольной точки на этой линии откладываем вектор произвольной длины силы  (мм).
(мм).
Масштабный коэффициент плана сил  , Н/мм.
, Н/мм.
Из конца вектора  проводим в масштабе
проводим в масштабе  последовательно вектора, мм
последовательно вектора, мм

Из конца последнего вектора  проводим линию действия силы реакции
проводим линию действия силы реакции  параллельно звену 3. Точка пересечения двух линий действий определит на плане сил полюс построения PF, а также величину и направление всех неизвестных сил, Н
параллельно звену 3. Точка пересечения двух линий действий определит на плане сил полюс построения PF, а также величину и направление всех неизвестных сил, Н
 ,
,  .
.
|