Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Электрические системы передачи измерительной информации с унифицированным токовым сигналом
|
|
Одной из распространенных систем передачи измерительной информации является электрическая система с унифицированным токовым сигналом. Использование постоянного тока в этой системе повышает ее помехоустойчивость, так как позволяет исключить влияние индуктивность и емкости линий связи на сигнал измерительной информации и увеличивает протяжность канала связи до 5-20 км.
Приемниками информации в электрических системах передачи могут быть промежуточные преобразователи, регуляторы, измерительные приборы или средства вычислительной техники.
В качестве источников информации в электрических системах передачи с унифицированным токовым сигналом применяются первичные измерительные преобразователи, оснащенные преобразователями либо «сила - ток», либо «перемещение - ток».
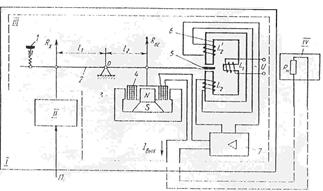
Рис 6.5. Схема электрической системы передачи измерительной информации с преобразователем «сила - ток».
Магнитоэлектрический преобразовательный элемент состоит из стержневого постоянного магнита NS с П-образным магнитопроводом расположена круглая рамка 4, жестко закрепляя на рычаге 2. Обмотка рамки соединена с выходом электронного усилителя 7. Вход электронного усилителя соединен со вторичными обработками L  и
и  индикатора перемещения 6 рычага 2. Индикатор перемещения выполнен в виде дифференциально-трансформаторно преобразователя, на первичную обработку
индикатора перемещения 6 рычага 2. Индикатор перемещения выполнен в виде дифференциально-трансформаторно преобразователя, на первичную обработку  которого подается питание с электронного усилителя.
которого подается питание с электронного усилителя.
При изменении значения П равновесие рычажной системы нарушается, что приводит к перемещению рычага и укрепленного на нем сердечника 5 из магнитомягкого материала. Перемещение сердечника преобразуется индикатором перемещения 6 в электрический сигнал.  , который поступает на вход электронного усилителя 7. Последний усиливает и преобразует в ток
, который поступает на вход электронного усилителя 7. Последний усиливает и преобразует в ток  , подаваемый в линию связи и на вход элемента обратной связи – магнитоэлектрического преобразовательного элемента. При протекании тока
, подаваемый в линию связи и на вход элемента обратной связи – магнитоэлектрического преобразовательного элемента. При протекании тока  по катушке 4 магнитоэлектрического преобразовательного элемента формируется сила
по катушке 4 магнитоэлектрического преобразовательного элемента формируется сила
 (6.15)
(6.15)
где В – магнитная индукция;  - средняя длина витка катушки; n – число витков катушки.
- средняя длина витка катушки; n – число витков катушки.
Перемещение рычага 2 под действием сил Rx и Roc происходит до тех пор, пока не наступит состояние равновесия:
 (6.16)
(6.16)
В состоянии равновесия выходной сигнал преобразователя «сила - ток» связан с силой Rx зависимостью
 (6.17)
(6.17)
Уравнение (6.17) представляет собой статическую характеристику преобразователя «сила - ток». Принимая во внимание статическую характеристику (6.5): Rx  чувствительного элемента, запишем уравнение (6.17):
чувствительного элемента, запишем уравнение (6.17):
 (6.18)
(6.18)
где k0- коэффициент преобразования чувствительного элемента.
 - коэффициент преобразования ПИП.
- коэффициент преобразования ПИП.
Уравнение представляет собой статическую характеристику ПИП.
Путем изменения коэффициента  можно изменять диапазон измерений преобразователя в пределах
можно изменять диапазон измерений преобразователя в пределах  %. Как и в пневматических преобразователях, изменение достигается изменением отношения
%. Как и в пневматических преобразователях, изменение достигается изменением отношения  .
.
Для преобразователя, настроенного на заданный диапазон измерений, например
0-  , статическая характеристика имеет вид
, статическая характеристика имеет вид
 (6.19)
(6.19)
где k – постоянный коэффициент, определяемый диапазоном изменения выходного сигнала и равный 5 для ПИП с диапазоном изменения выходного сигнала 0-5 мА.
Для ПИП с диапазоном измерений 
 , статические характеристики имеют вид
, статические характеристики имеют вид
 (6.20)
(6.20)
если диапазон изменения выходного сигнала 0-5 мА или
 (6.21)
(6.21)
если диапазон изменения выходного сигнала 0-20мА
Основная литература: [2-7, 24] (стр.25)
Дополнительная литература: [5-7]