Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Общие сведения. Кинематической схемой[3] называется условное графическое изображение всех связанных между собой механизмов и передач
|
|
Кинематической схемой [3] называется условное графическое изображение всех связанных между собой механизмов и передач, которые передают движение от источника движения (электродви-гателя) к исполнительным органам станка (шпинделю, суппорту и др.). На рис. 2.1 приведена кинематическая схема токарного станка с ЧПУ. Кинематическая схема предназначена для установления принципа работы станка и выявления взаимодействия его механизмов. Однако условные обозначения не могут обеспечить полного представления о станке. Поэтому на кинематической схеме станка также приводят значения диаметров шкивов, чисел зубьев зубчатых и червячных колес, чисел заходов червяка, шага ходового винта, мощности и частоты вращения вала электродвигателя и др. Кинематическая схема состоит из нескольких кинематических цепей, каждая из которых имеет определенное назначение: например, цепь главного движения, цепь движения подачи или цепь нарезания резьбы.
Движения конечных звеньев кинематической цепи могут быть связаны между собой математическим выражением через передаточные отношения механизмов, расположенных между ними, которое называется уравнением кинематического баланса.
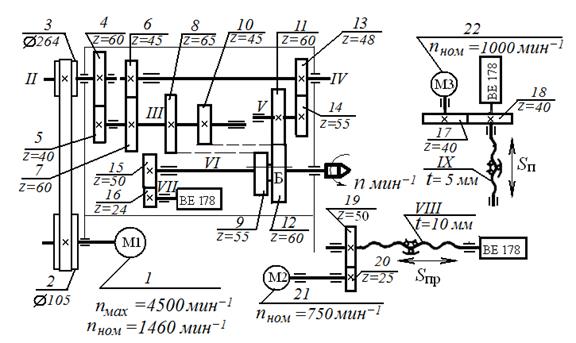
Рис. 2.1. Кинематическая схема токарного станка с ЧПУ
Привод главного движения. Главным называется движение, определяющее скорость резания. Для данного станка (см. рис. 2.1) приводом цепи главного движения является совокупность механизмов от электродвигателя М1 до шпинделя VI. Для получения широкого диапазона частот вращения шпинделя станки с ЧПУ снабжаются комбинированным приводом, состоящим из регулируе-мых двигателей и коробки скоростей. При этом использование ко-робки с зубчатой передачей при помощи зубчатого блока Б позво-ляет получать регулирование частоты вращения шпинделя в трёх диапазонах 12, 5... 200; 50... 800; 125... 800 мин.–1. Двигатель постоянного тока М1 позволяет регулировать частоту вращения шпинделя внутри этих ступеней бесступенчато.
Составим уравнение кинематического баланса. Для этого установим начальное и конечное звенья цепи привода: начальным звеном является электродвигатель М1, а конечным звеном – шпиндель. Уравнение кинематического баланса:
n об. э.д. М1 · i 1· i 2·…· i n = n об. шп.
Движение с вала I на вал VI (шпиндель) передается следующими возможными вариантами:
 ;
;
 ;
;
Привод движения подач. Движение, осуществляемое механизмом подачи металлорежущего станка называется движением подачи. Источниками движений продольной и поперечной подач в кинематической схеме (см. рис. 2.1) служат высокомоментные электродвигатели постоянного тока: для движения продольной подачи – М2, для движения поперечной – МЗ. Электродвигатели работают в сочетании с датчиками ВЕ178, которые реагируют на частоту вращения ходовых винтов и посылают сигналы в систему электропитания электродвигателей для поддержания постоянства их оборотов. Эти датчики также обеспечивают необходимые величины перемещений. Регулирование скоростей подач – бесступенчатое. К приводам подач станков с ЧПУ предъявляют особые требования в части обеспечения равномерности движения и точности установочных перемещений. Прямолинейные движения суппортов осуществляются с помощью передачи винт—гайка качения (рис. 2.2), которая обеспечивает высокую осевую жесткость и равномерность движения.

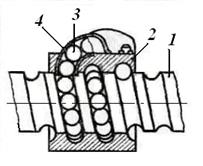
Передача винт— гайка качения состоит из винта 1, гайки 2, комплекта шариков 3 и вкладыша 4 для возврата шариков. Между винтом и гайкой, имеющими резьбу специального профиля, помещаются шарики, перекатывающиеся при вращении винта. При вращении винта шарики, вращаясь вокруг своих осей, перемещаются по впадине резьбы и тем самым перемещают гайку со связанным с ней механизмом станка. Вкладыш 4 для непрерывной циркуляции шариков имеет специальный канал возврата, соединяющий соседние витки гайки и заставляющий циркулировать шарики в их пределах.
К преимуществам данной конструкции относят малые габарит-ные размеры, отсутствие быстроизнашивающихся деталей и малую длину каналов возврата.
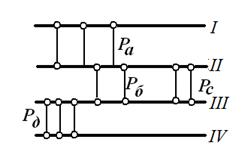
Аналитическое определение числа ступеней скоростей вращения валов кинематической цепи. Как было показано движение с одного вала на другой или с одного кинематического звена на другое может осуществляться одинарной зубчатой передачей или группой передач, а также с применением двойного или тройного блоков зубчатых колёс. Если обозначить количество передач в группах Ра, Рв, Рс … Рк при настройке последовательно включенными групповыми передачами, то число ступеней скорости вращения шпинделя определится из выражения Z = Ра · Рв · Рс ·…· Рк.
Для кинематической схемы, приведенной на рис. 2.3, имеем: Z = Ра · Рв · Рс = = 3 · 2 · 2 =12 скоростей.

При наличии между двумя валами двух групп передач, например двух двойных блоков, количество их ступеней складывается (рис. 2.4), т. е.
Z = Ра ·(Рб + Рс) · Рд =3 · (2 + 2) · 3 = 36 ступеней.