Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Основные законы электромеханического преобразования энергии (ЭМ)
|
|
Электрические машины
Как правило, под законами электромеханики подразумевают следующие законы электродинамики, необходимые для анализа процессов и проектирования электромеханических преобразователей[12].
1. Закон электромагнитной индукции Фарадея:
где  — ЭДС,
— ЭДС,  — магнитный поток,
— магнитный поток,  — магнитная индукция в данной точке поля,
— магнитная индукция в данной точке поля,  — активная длина проводника в пределах равномерного магнитного поля с индукцией , расположенного в плоскости, перпендикулярной к направлению магнитных силовых линий,
— активная длина проводника в пределах равномерного магнитного поля с индукцией , расположенного в плоскости, перпендикулярной к направлению магнитных силовых линий,  — скорость проводника в плоскости, нормальной к , в направлении, перпендикулярном к .
— скорость проводника в плоскости, нормальной к , в направлении, перпендикулярном к .
2. Закон полного тока для магнитной цепи (1-ое уравнение Максвелла в интегральной форме):
где  — вектор напряженности магнитного поля,
— вектор напряженности магнитного поля,  — элементарное перемещение вдоль некоторого пути в магнитном поле,
— элементарное перемещение вдоль некоторого пути в магнитном поле,  — величина полного тока, который охватывается контуром интегрирования.
— величина полного тока, который охватывается контуром интегрирования.
3. Закон электромагнитных сил (закон Ампера).

Профессор МЭИ Копылов И. П. сформулировал три общих закона электромеханики[13]:
1-й закон: Электромеханическое преобразование энергии не может осуществляться без потерь, его КПД всегда меньше 100 %.
2-ой закон: Все электрические машины обратимы, одна и та же машина может работать как в режиме двигателя так и в режиме генератора.
3-ий закон: Электромеханическое преобразование энергии осуществляется неподвижными друг относительно друга полями. Ротор может вращаться с той же скоростью, что и поле (в синхронных машинах), или с другой скоростью (в асинхронных машинах), однако поля
статора и ротора в установившемся режиме неподвижны относительно друг друга.
2)основные законы, лежащие в основе теории электрических машин
1.Основное уравнение электрической машины[14] — уравнение, связывающее между собой величины диаметра ротора и длины ротора с мощностью двигателя и числом оборотов в минуту:

где  — диаметр ротора,
— диаметр ротора,  — длина ротора,
— длина ротора,  — синхронная скорость вращения ротора в об/мин (равная скорости вращения первой гармоники МДС обмотки статора),
— синхронная скорость вращения ротора в об/мин (равная скорости вращения первой гармоники МДС обмотки статора),  — мощность электрической машины в кВт,
— мощность электрической машины в кВт,  — коэффициент мощности,
— коэффициент мощности,  — обмоточный коэффициент, учитывающий влияние распределения обмотки в пазах и влияние укорочения шага обмотки,
— обмоточный коэффициент, учитывающий влияние распределения обмотки в пазах и влияние укорочения шага обмотки,  — амплитуда нормальной составляющей магнитной индукции в зазоре машины,
— амплитуда нормальной составляющей магнитной индукции в зазоре машины,  — «линейная нагрузка», равная числу амперпроводников, приходящихся на 1 погонный сантиметр длины окружности статора. Правая часть основного уравнения для данного (известного) типа машины изменяются в сравнительно узких пределах и называется «машинной постоянной» или постоянной Арнольда
— «линейная нагрузка», равная числу амперпроводников, приходящихся на 1 погонный сантиметр длины окружности статора. Правая часть основного уравнения для данного (известного) типа машины изменяются в сравнительно узких пределах и называется «машинной постоянной» или постоянной Арнольда
2.Уравнения равновесия напряжений обмоток электрической машины — уравнения, составленные для цепей обмоток на основании второго закона Кирхгофа
Для асинхронной машины с короткозамкнутым ротором уравнения равновесия напряжений имеют вид[15]:


где  — фазное напряжение статора,
— фазное напряжение статора,  и
и  — фазные токи статора и ротора,
— фазные токи статора и ротора,  и
и  — активные сопротивления обмоток статора и ротора,
— активные сопротивления обмоток статора и ротора,  и
и  — индуктивные сопротивления рассеяния статора и ротора,
— индуктивные сопротивления рассеяния статора и ротора,  и
и  — ЭДС, индуктированные в обмотках статора и ротора результирующим магнитным потоком полей статора и ротора.
— ЭДС, индуктированные в обмотках статора и ротора результирующим магнитным потоком полей статора и ротора.
3.Уравнение электромагнитного момента
Уравнение электромагнитного момента асинхронной машины имеет вид[16]:

где  — число фаз обмотки статора,
— число фаз обмотки статора,  — число пар полюсов,
— число пар полюсов,  — действующее значение напряжения статора,
— действующее значение напряжения статора,  — частота тока статора,
— частота тока статора,  — активное сопротивление ротора, приведённое к статору, — активное сопротивление фазной обмотки статора,
— активное сопротивление ротора, приведённое к статору, — активное сопротивление фазной обмотки статора,  — индуктивное сопротивление короткого замыкания, приблизительно равное сумме индуктивности рассеяния статора и приведённой к статору индуктивности рассеяния ротора
— индуктивное сопротивление короткого замыкания, приблизительно равное сумме индуктивности рассеяния статора и приведённой к статору индуктивности рассеяния ротора  .
.
Уравнение электромагнитного момента синхронной машины[15]:

где  — ЭДС, индуктируемая в обмотке статора потоком ротора,
— ЭДС, индуктируемая в обмотке статора потоком ротора,  — угол нагрузки (угол сдвига фаз между ЭДС и напряжением статора),
— угол нагрузки (угол сдвига фаз между ЭДС и напряжением статора),  — продольное и поперечное синхронные индуктивные сопротивления обмотки статора.
— продольное и поперечное синхронные индуктивные сопротивления обмотки статора.
Для получения в машине постоянного тока номинальных данных в ней необходимо наличие магнитного потока Ф. Требуемая величина магнитного потока может быть определена из формулы

3) расчет магнитной цепи машины постоянного тока
Магнитный поток в машинах постоянного тока создается под действием
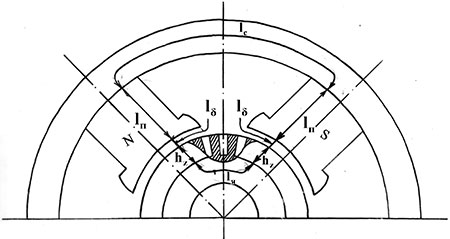
Рис. 1 — Магнитная цепь пары полюсов четырехполюсной машины
магнитодвижущей силы (МДС) обмоток возбуждения главных полюсов. Магнитный поток замыкается в машине между разноименными полюсами по определенному пути, который называется магнитной цепью машины.На рисунке 1.25 показана магнитная цепь пары полюсов четырехполюсной машины. Магнитная цепь машины обычно симметрична и имеет пять характерных однородных участков: главные полюса hп, воздушный зазор δ, зубцы якоря hz, сердечник якоря lя и станину lc машины. Поток, создаваемый каждым из полюсов,, делится относительно продольной оси полюса на две части, образующие вместе с соседними полюсами два одинаковых магнитных контура. Число таких контуров равно числу полюсов. Расчет магнитной цепи машины постоянного тока заключается в определении МДС, необходимой для создания под полюсами машины основного магнитного потока требуемой величины. Расчет ведут обычно на одну пару полюсов ввиду симметричности машины. Магнитную цепь можно рассчитать на основе закона полного тока для средней магнитной линии

где  – напряженность магнитного поля;
– напряженность магнитного поля;
 – элемент длины магнитной линии;
– элемент длины магнитной линии;
 – полный ток, охватываемый магнитной линией.
– полный ток, охватываемый магнитной линией.
Предположив, что на протяжении каждого однородного участка Н постоянна, заменяем интеграл суммой

где Hk– напряженность магнитного поля в каждом однородном участке;
lk – средняя длина однородного участка;
F0 – полная МДС пары полюсов, действующая в контуре цепи.
Таким образом, общую МДС, действующую в контуре, можно представить суммой МДС, необходимых для проведения магнитного потока на заданных участках

Коэффициент Kδ учитывает возрастание среднего воздушного зазора, называется коэффициентом воздушного зазора (коэффициентом Картера) и равен 1, 1÷ 1, 5. Величину напряженности поля в K–ом участке можно определить по формуле

где Bk – индукция магнитного поля в участке;
μ k – магнитная проницаемость участка.
Для участков из ферромагнитных материалов Нk находится по кривым намагничивания В = f (H), так как для них μ = var.
Индукцию Bk определяют по величине потока Фk и сечению участка Sk

Подставив найденные значения Hk и lk в формулу общей МДС получим полную МДС пары полюсов.Расчетное значение МДС возбуждения зависит от потока Ф, который необходимо создать в машине. Задаваясь различными значениями основного потока, например 0, 5Ф, 0, 75Ф, 1, 0Ф, 1, 25Ф можно рассчитать соответствующие им МДС обмотки возбуждения и построить графически зависимость Ф = f (Fo).
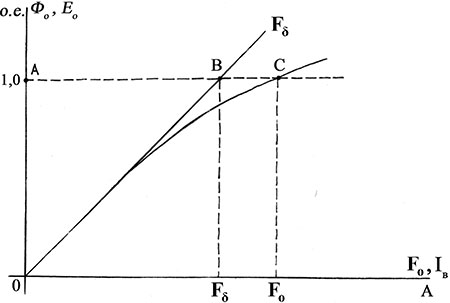
Эта зависимость (рис.2) носит название характеристики намагничивания машины. Степень насыщения магнитной системы машины характеризуется коэффициентом насыщения, который находится расчетным путем или из кривой намагничивания
Коэффициент насыщения для различных машин находится в пределах 1, 25÷ 1, 75. Характеристика намагничивания, выраженная в другом масштабе, представляет собой характеристику холостого хода машины Eo= f (Iв), т.е. завиcимость ЭДС от тока возбуждения при постоянной частоте вращения n = const.
4. Устройство и принцип работы машины постоянного тока
По конструктивному выполнению машина постоянного тока (рис. 8.2) подобна обращенной синхронной машине, у которой обмотка якоря расположена на роторе, а обмотка возбуждения — на статоре. Основное отличие заключается в том, что машина постоянного тока имеет на якоре коллектор, а на статоре кроме главных полюсов с обмоткой возбуждения — добавочные полюсы, которые служат для уменьшения искрения под щетками.
Статор. На статоре расположены главные полюсы с катушками обмотки возбуждения и добавочные полюсы (на рис. 8.2 не показаны) с соответствующими катушками. Полюсы крепят болтами к стальному корпусу, который является частью магнитной цепи машины. Главные полюсы (рис. 8.3) выполняют шихтованными (из стальных штампованных листов), а добавочные — массивными или также шихтованными.
По станине и полюсам замыкается постоянный магнитный поток, поэтому выполнение полюсов массивными или из листов определяется в основном удобствами технологии. Стальные листы спрессовывают под давлением и скрепляют заклепками и нажимными щеками, установленными по краям каждого полюса. Шихтованными должны быть только наконечники главных полюсов, так как при вращении зубчатого якоря из-за пульсации магнитного потока в воздушном зазоре в них возникают вихревые токи и потери мощности. Однако по условиям технологии обычно выполняют шихтованным весь полюс. Полюсы крепят к станине болтами; резьбу для болтов нарезают непосредственно в шихтованном сердечнике полюса (рис. 8.3, а) либо в массивных стальных стержнях, которые вставляют в выштампованные отверстия в полюсах (рис. 8.3, 6).
| Рис. 8.2. Устройство машины постоянного тока: 1 - коллектор; 2 — щетки; 3 — сердечник якоря; 4 — главный полюс; 5 — катушки обмотки возбуждения; 6 — корпус (станина); 7 — подшипниковый щит; 8 — вентилятор; 9 — обмоткаякоря |
| Рис. 8.3. Устройство главных полюсов: 1 - полюсный наконечник; 2 - сердечник полюса; 3 - установочный болт; 4 - заклепки; 5 - установочный стержень; 6 - нажимные щеки | 
|
|
| Рис. 8.4. Устройство катушек главных (а) и добавочных (б) полюсов: 1 - главный полюс; 2 - катушка обмотки возбуждения; 3 - опорный угольник; 4 - добавочный полюс; 5 - катушка обмотки добавочных полюсов |
Катушки главных и добавочных полюсов изготовляют из изолированного медного провода круглого или прямоугольного сечения. Катушки машин малой мощности выполняют из тонкой проволоки; последовательные катушки обмоток возбуждения и добавочных полюсов — из полосовой меди (рис. 8.4). Расположенную на полюсе обмотку иногда разбивают на несколько катушек (секций) для лучшего ее охлаждения. При секционном выполнении катушек между отдельными секциями устанавливают дистанционные шайбы из изоляционного материала, посредством которых образуются вентиляционные каналы. Якорь. Сердечник якоря, так же как в синхронной машине, собирают из изолированных листов электротехнической стали (рис. 8.5), Обмотку якоря изготовляют из провода круглого или прямоугольного сечения; обычно она состоит из отдельных, заранее намотанных, якорных катушек (рис. 8.6), которые обматывают изоляционными лентами и укладывают в пазы
| Рис. 8.5. Устройство сердечника якоря (а)и сборка его (б): 1, 3 - нажимные шайбы (обмоткодержатели); 2 - выточки для наложения бандажа; 4 - место для запрессовки коллектора; 5 - изоляционная пленка; 6 - стальной лист |
| Рис. 8.6. Устройство якорных катушек (а) и расположение их в пазах (б): 1 - якорные катушки; 2 - сердечник якоря; 3 - коллектор; 4, 5 - верхняя и нижняя стороны якорной катушки | 
|
сердечника якоря. Обмотку выполняют двухслойной; в каждом пазу укладывают две стороны различных якорных катушек — одну поверх другой. Каждая якорная катушка включает в себя несколько секций, концы которых припаивают к соответствующим коллекторным пластинам; секции могут быть одно- и многовитковыми.
Коллектор. Обычно коллектор выполняют в виде цилиндра (рис. 8.7), собранного из клинообразных пластин твердотянутой меди; между пластинами располагают изоляционные прокладки из слюды или миканита. Узкие края коллекторных пластин имеют форму ласточкина хвоста; после сборки коллектора их зажимают между корпусом и нажимным фланцем (рис. 8.7, а) и изолируют манжетами из миканита. Секции обмотки якоря впаивают в прорези, имеющиеся в выступающей части коллекторных пластин.
|
| Рис. 8.7. Устройство коллектора машины постоянного тока с металлическим и пластмассовым корпусом: 1 — корпус; 2 — нажимный фланец; 3 — изоляционные манжеты; 4 — коллекторные пластины; 5 — изоляционные прокладки; б — пластмасса; 7 — втулка |
В машинах малой и средней мощности широко применяют коллекторы, в которых медные пластины и миканитовые прокладки запрессованы в пластмассу (рис. 8.7, б). Поверхность собранного коллектора обтачивают на токарном станке и тщательно шлифуют. Чтобы миканитовые прокладки при срабатывании коллектора не выступали над пластинами и не вызывали вибрации щеток, их профрезеровывают на 0, 8—1, 5 мм ниже поверхности коллектора.
Щеточный аппарат. По цилиндрической части коллектора скользят щетки, установленные в щеткодержателях. Щетки представляют собой прямоугольные бруски, изготовленные путем прессовки и термической обработки из порошков графита, кокса и других компонентов. Они предназначены для соединения коллектора с внешней цепью и прижимаются к поверхности коллектора пружинами (рис. 8.8, а).
При вращении якоря щетки сохраняют неизменное положение относительно полюсов машины. Щеткодержатели укрепляют на щеточных пальцах и изолируют от них. Щеточные пальцы, в свою очередь, крепят либо к подшипниковому щиту, либо к траверсе, которая позволяет при необходимости поворачивать всю систему щеток относительно полюсов машины. В машинах малой мощности часто применяют трубчатые щеткодержатели (рис. 8.8, б), устанавливаемые непосредственно в подшипниковом щите.
| Рис. 8.8. Устройство щеткодержателей машин средней (а) и малой (б) мощностей: 1 — щетка; 2 — обойма; 3 — пружина; 4 — зажимы для крепления к щеточному пальцу; 5 — щеточный канатик; 6 — нажимный палец; 7 — колпак; 8 — изоляционная втулка; 9 — подшипниковый щит; 10 — зажим для выводного проводника |
| Рис. 8.9. Устройство щеток машин малой (а) и большой (б) мощностей: 1 — щетка; 2 — щеточный канатик; 3 — кабельный наконечник | 
|
В зависимости от состава, способа изготовления и физических свойств все щетки (рис. 8.9) делят на шесть основных групп: угольно-графитные, графитные, электрографитированные, медно-графитные, бронзо-графитные и серебряно-графитные. Для каждой машины следует применять щетки только установленной марки, которая выбирается заводом-изготовителем, исходя из условий работы машины.
5)Класификация машин постоянного тока по способу возбуждения.
Для работы генератора необходимо наличие в нем магнитного поля. В зависимости от способа создания магнитного поля все генераторы постоянного тока (ГПТ) делят на:
1 - генераторы с независимым возбуждением:
- электромагнитные, где поле создается специальной обмоткой,
- магнитоэлектрические, где поле создается с помощью постоянных
магнитов;
2 - генераторы с самовозбуждением:
- параллельного возбуждения,
- последовательного возбуждения,
- смешанного возбуждения.
Свойства генераторов анализируют с помощью характеристик, устанавливающих зависимости между основными величинами, определяющими работу генератора. Таковыми являются:
- напряжение на зажимах, U, B;
- ток нагрузки, I, A;
- ток возбуждения, Iв, А;
- полезная электрическая мощность, Р, Вт;
- частота вращения якоря n, мин.
Номинальные значения этих величин входят в паспортные данные всех генераторов постоянного тока. Можно указать и ряд дополнительных величин, например, число пар полюсов Р, сопротивления обмоток Rя, Rш, Rc и т.п. Основную группу характеристик снимают при неизменной частоте вращения якоря.
Основными характеристиками ГПТ являются:
1. Характеристика холостого хода Uo = f(Iв); I = 0;
(Uo - напряжение холостого хода генератора).
2. Внешняя характеристика U = f(I); Rв = 0;
(Rв - сопротивление реостата в цепи возбуждения).
3. Регулировочная характеристика Iв = f(I); U = Uном;
(Uном - номинальное напряжение генератора).
6) Рабочие характеристики двигателей постоянного тока
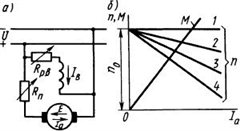
Двигатель с параллельным возбуждением. В этом двигателе (рис.7-2, а) обмотка возбуждения подключена параллельно с обмоткой якоря к сети. В цепь обмотки возбуждения включен регулировочный реостат RpB, а в цепь якоря—пусковой реостат Rn. Характерная особенность двигателя— его ток возбуждения Iв не зависит от тока якоря
Рис. 7-2. Схема двигателя с параллельным возбуждением (а) и его моментная и скоростная характеристики (б) 1а (тока нагрузки), так как питание обмотки возбуждения по существу независимое. Следовательно, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя не зависит от нагрузки. При этом условии, согласно E=ceФn и M=cMФIa, получаем, что зависимости M=f(Ia) и n = f(la) (моментная и скоростная характеристики) линейные(рис.7-2, б). Следовательно, линейная и механическая характеристика двигателя n = f(M) (рис.7-3, а). Если в цепь якоря включен добавочный резистор или реостат Rn, то п = [U-Iа(Σ Rа+ RП)]/(сеФ) = п0-Δ п, (7-1) где по=U/(сеФ) — частота вращения при холостом ходе; Δ п = ( Σ R а+ Rп)1а/(сеФ) — снижение частоты, обусловленное суммарным падением напряжения во всех сопротивлениях, включенных в цепь якоря двигателя. Величина Δ n, зависящая от суммы сопротивлений Σ R а+ RП, определяет наклон скоростной n = f(I а) и механической n = f(M) характеристик к оси абсцисс. При отсутствии в цепи якоря добавочного сопротивления Rn указанные характеристики жесткие (естественные характеристики 1 на рис.7-2, б и 7-3, а).
Рис. 7-3. Механические (а) и рабочие (б) характеристики двигателя с параллельным возбуждением При включении добавочного реостата угол наклона этих характеристик возрастает, вследствие чего образуется семейство реостатных характеристик 2, 3, 4, соответствующих различным сопротивлениям реостата Rnl, Rn2 и Rn3. Чем больше сопротивление Rn, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче. Реакция якоря, уменьшая несколько поток машины Φ при нагрузке, стремится придать естественной механической характеристике отрицательный угол наклона, при котором частота вращения η возрастает с увеличением момента М. Однако двигатель с такой характеристикой в большинстве электроприводов устойчиво работать не может. Поэтому современные двигатели большой и средней мощностей с параллельным возбуждением часто имеют небольшую последовательную обмотку возбуждения, которая придает механической характеристике необходимый наклон. МДС этой обмотки при токе I ном составляет около 10% от МДС параллельной обмотки. Регулировочный реостат Rp. B позволяет изменять ток возбуждения двигателя I в и его магнитный поток Ф. При этом изменяется и частота вращения п. В цепь обмотки возбуждения выключатели и предохранители не устанавливают, так как при разрыве этой цепи и небольшой нагрузке на валу частота вращения двигателя резко возрастает(двигатель идет в «разнос»). При этом сильно увеличивается ток якоря и может возникнуть искрение щеток. Рабочие характеристики рассматриваемого двигателя (рис.7-3, б) представляют собой зависимости потребляемой мощности Ρ 1, тока Ι α Если в двигателе обмотка якоря и обмотка возбуждения подключены к источникам питания с различными напряжениями, то его называют двигателем с независимым возбуждением. Такие двигатели применяют в электрических приводах, у которых питание обмотки якоря осуществляется от генератора или полупроводникового преобразователя. Механические и рабочие характеристики двигателя с независимым возбуждением аналогичны характеристикам двигателя с параллельным возбуждением, так как у них ток возбуждения I в также не зависит от тока якоря 1а. Двигатель с последовательным возбуждением. В этом двигателе (рис.7-4, а) ток возбуждения I в = I а, поэтому
Рис. 7-4. Схема двигателя с последовательным возбуждением (а) и его моментная и скоростная характеристики (б) магнитный поток Ф является некоторой функцией тока якоря 1а. Характер этой функции изменяется в зависимости от нагрузки двигателя. При I а< (0, 8...0, 9 )I ном, когда магнитная система машины не насыщена, Ф = kфIа, причем коэффициент пропорциональности kф в значительном диапазоне нагрузок остается практически постоянным. При дальнейшем возрастании тока якоря поток Ф возрастает медленнее, чем I а, при больших нагрузках (I а > I НОМ) можно считать, что Ф При /а< (0, 8...0, 9)/ном скоростная характеристика двигателя n = f(la) (рис.7-4, б) имеет форму гиперболы, так как частота вращения
где С1 и С2 — постоянные. При 1а > I ном скоростная характеристика становится линейной, так как частота вращения
где С'1 и С'2 — постоянные. Аналогично можно получить зависимость электромагнитного момента от тока якоря M=f(la). При I а< (0, 8...0, 9 )I н * *I ном моментная характеристика M=f(Ia) имеет форму параболы (рис.7-4, б), так как электромагнитный момент М=смФIа= смкф12а= С312а, (7-4) где С3 — постоянная. При Ia> I HOM моментная характеристика линейная, так как
Рис. 7-5. Механические (а) и рабочие (б) характеристики двигателя с последовательным возбуждением М=смФ1а= С'31а, (7-5) где С'з — постоянная. Механические характеристики n = f(M) (рис.7-5, а) можно построить на основании зависимостей n = f(la) и М= f(la). При I а< (0, 8...0, 9 )I ном частота вращения изменяется по закону
где С4 — постоянная. При Ia> I ном зависимость n = f(M) становится линейной. Включая в цепь якоря пусковые реостаты с сопротивлениями Rnl9Rn2 и Rn3 кроме естественной характеристики 1 можно получить семейство реостатных характеристик 2, 3 и 4, причем, чем больше Rn, тем ниже располагается характеристика. Рабочие характеристики двигателя с последовательным возбуждением приведены на рис.7-5, б. Зависимости n = f(P2), M=f(P2) являются нелинейными; зависимости P 1 = f(P 2)' Ia= f(P2) и η = f (P2) имеют примерно такой же характер, как и у двигателя с параллельным возбуждением. Из рассмотрения рис.7-5, а следует, что механические характеристики рассматриваемого двигателя (естественная и реостатные) являются мягкими и имеют гиперболический характер.При малых нагрузках частота вращения п резко возрастает и может превысить максимально допустимое значение (двигатель идет «в разнос»). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода или при небольшой нагрузке(различные станки, транспортеры и пр.). Обычно минимально допустимая нагрузка составляет (0, 2...0, 25 )I НОМ; только двигатели малой мощности (десятки ватт) используют для работы
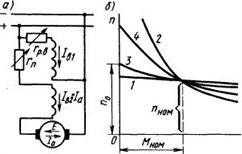
Рис. 7-6. Характеристики двигателей с последовательным и параллельным возбуждением в устройствах, где возможен холостой ход. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко; применение ременной передачи или фрикционной муфты для включения недопустимо. Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют в различных электрических приводах, особенно там, где имеется изменение нагрузочного момента в широких пределах и тяжелые условия пуска (грузоподъемные и поворотные механизмы, тяговый привод и пр.). Это объясняется тем, что мягкая характеристика рассматриваемого двигателя более благоприятна для указанных условий работы, чем жесткая характеристика двигателя с параллельным возбуждением. Мощность Р1 и ток 1а у двигателей с последовательным возбуждением изменяются в меньших пределах, чем у двигателей с параллельным возбуждением; кроме того, они лучше переносят перегрузки. Двигатель с последовательным возбуждением развивает больший пусковой момент. На рис.7-6 показаны для сравнения характеристики двигателей с последовательным (индексы «1») и параллельным (индексы «2») возбуждением. Двигатель со смешанным возбуждением. В этом двигателе (рис.7-7, а) магнитный поток Φ создается в результате совместного действия двух обмоток возбуждения — паралельной и последовательной. Поэтому его механические характеристики (рис. 7-7, б, кривые 3 и 4) располагаются между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения МДС параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (при малой МДС последовательной обмотки) или к характеристике 2 (при малой МДС параллельной обмотки). Одним из достоинств двигателя со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, так как его частота вращения п0 может быть ограничена на допустимом уровне.
Рис. 7-7. Схема двигателя со смешанным возбуждением (а) и его механические характеристики (б) |
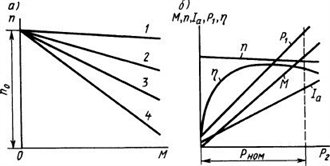
 I н, частоты вращения n, момента Μ и КПД η от отдаваемой мощности Р2 на валу двигателя при U= const и IB= const. Характеристики n = f (Р2) и М = f (Р2) являются линейными, а зависимости Ρ ι = f (Ρ 2), Ia= f(P2) и η = f(P2) имеют характер общий для всех электрических машин. Иногда рабочие характеристики строят в зависимости от тока якоря 1а.
I н, частоты вращения n, момента Μ и КПД η от отдаваемой мощности Р2 на валу двигателя при U= const и IB= const. Характеристики n = f (Р2) и М = f (Р2) являются линейными, а зависимости Ρ ι = f (Ρ 2), Ia= f(P2) и η = f(P2) имеют характер общий для всех электрических машин. Иногда рабочие характеристики строят в зависимости от тока якоря 1а.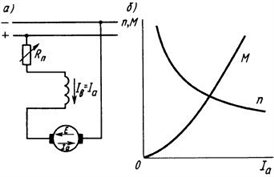
 const. В соответствии с этим изменяются зависимости n = f(Ia) и M = f(Ia).
const. В соответствии с этим изменяются зависимости n = f(Ia) и M = f(Ia). (7-2)
(7-2) (7-3)
(7-3)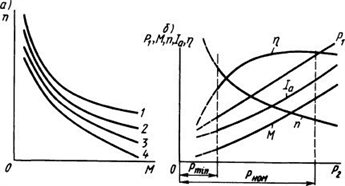
 (7-6)
(7-6)
7) способы пуска и регулирования частоты вращения асинхронных двигателей
На практике замечено, что ток, потребляемый обмоткой статора в первый момент пуска двигателя, очень большой. В ряде случаев он превышает номинальный ток в 6 - 10 раз.
Такой нагрузки может не выдержать не только питающая сеть, но и сама обмотка статора. Поэтому для пуска крупных асинхронных двигателей применяют специальные устройства, снижающие пусковой ток. На рис. 5.13.1. показаны схемы пуска мощных двигателей с помощью реакторов и автотрансформатора.
Принцип ограничения тока заключается в том, что к статорной обмотке двигателя на период пуска подводится пониженное напряжение. После разгона его дополнительные устройства от двигателя отключаются.
Иногда для снижения напряжения, подаваемого в обмотки статора, изменяют схему переключения обмоток. Например, асинхронный двигатель нормально работает по схеме " треугольник". Если на период пуска его обмотки включить " звездой", то на каждую фазу придется напряжение в  раз меньшее.
раз меньшее.
Двигатели с фазным ротором пускаются в работу с помощью дополнительных сопротивлений. Вводя дополнительные сопротивления в цепь ротора, добиваются ограничения пускового тока.
Регулирование частоты вращения асинхронного двигателя определяется формулой:
 .
.
Здесь возможны три различных способа реализации:
Первый заключается в изменении частоты тока f, подаваемого в обмотки двигателя. Этот способ позволяет осуществлять плавное регулирование частоты вращения двигателя. Регуляторы частоты тока пока еще очень дороги, поэтому они мало применяются.
Второй способ связан с изменением пар полюсов p на статоре.
Укладывая на статоре несколько обмоток, рассчитанных на различные числа пар полюсов (р=1, 2, 3, 4), можно обеспечить различные частоты вращения магнитного поля (соответственно: 3000, 1500, 1000, 750 об/мин). Подключение к сети необходимой обмотки производится специальным переключателем.
Этот способ регулирования ступенчатый, но в ряде металлообрабатывающих станков он нашел самое широкое применение (например, для привода продольно-строгального станка при рабочем и обратном ходе).
Третий способ регулирования частоты вращения возможен лишь для двигателей с фазным ротором. Здесь изменение скольжения S достигается введением в цепь ротора регулировочных сопротивлений. Такие схемы широко используются на грузоподъемных кранах.
К категории регулирования вращения вала двигателя относится так называемое реверсирование, т.е. изменение направления вращения на обратное. Осуществляется оно путем изменения порядка чередования фаз обмотки статора. На рис. 5.13.2. показана схема изменения направления вращения вала двигателя.
Торможение асинхронного двигателя может быть механическим и электрическим.
К механическим относятся торможения муфтами, электромагнитными лентами, колодками и т.д.
Иногда применяют электродинамическое торможение, когда после отключения двигателя от сети переменного тока в его обмотки подается постоянный ток. В этом случае постоянное магнитное поле заметно сокращает выбег ротора.
Чаще используется торможение " противовыключением". После отключения двигателя от сети его кратковременно включают на вращение в обратную сторону. Как только оставшаяся частота вращения ротора n2 станет равной нулю, двигатель отключается от сети.
8) устройство и принцип работы трансформатора
Трансформатор – статический электромагнитный аппарат для преобразования переменного тока одного напряжения в переменный ток другого напряжения, той же частоты. Трансформаторы применяют в электрических цепях при передаче и распределении электрической энергии, а также в сварочных, нагревательных, выпрямительных электроустановках и многом другом.
Трансформаторы различают по числу фаз, числу обмоток, способу охлаждения. В основном используются силовые трансформаторы, предназначенные для повышения или понижения напряжения в электрических цепях.
Схема однофазного двухобмоточного трансформатора представлена ниже. 
На схеме изображены основные части: ферромагнитный сердечник, две обмотки на сердечнике. Первая обмотка и все величины которые к ней относятся (i1-ток, u1-напряжение, n1-число витков, Ф1 – магнитный поток) называют первичными, вторую обмотку и соответствующие величины - вторичными.
Первичную обмотку включают в сеть с переменным напряжением, её намагничивающая сила i1n1 создает в магнитопроводе переменный магнитный поток Ф, который сцеплен с обеими обмотками и в них индуцирует ЭДС e1= -n1 dФ/dt, e2= -n2dФ/dt. При синусоидальном изменении магнитного потока Ф = Фm sinω t, ЭДС равно e = Em sin (ω t-π /2). Для того чтобы посчитать действующее значение ЭДС нужно воспользоваться формулой E=4.44 f n Фm, где f- циклическая частота, n – количество витков, Фm – амплитуда магнитного потока. Причем если вы хотите посчитать величину ЭДС в какой либо из обмоток, нужно вместо n подставить число витков в данной обмотке.
Из приведенных выше формул можно сделать вывод о том, что ЭДС отстает от магнитного потока на четверть периода и отношение ЭДС в обмотках трансформатора равно отношению чисел витков E1/E2=n1/n2.
Если вторая обмотка не находится под нагрузкой, значит трансформатор находится в режиме холостого хода. В этом случае i2 = 0, а u2=E2, ток i1 мал и мало падение напряжения в первичной обмотке, поэтому u1≈ E1 и отношение ЭДС можно заменить отношением напряжений u1/u2 = n1/n2 = E1/E2 = k. Из этого можно сделать вывод, что вторичное напряжение может быть меньше или больше первичного, в зависимости от отношения чисел витков обмоток. Отношение первичного напряжения ко вторичному при холостом ходе трансформатора называется коэффициентом трансформации k.
Как только вторичная обмотка подключается к нагрузке, в цепи возникает ток i2, то есть совершается передача энергии от трансформатора, который получает ее из сети, к нагрузке. Передача энергии в самом трансформаторе происходит благодаря магнитному потоку Ф.
Обычно мощность на выходе и мощность на входе приблизительно равны, так как трансформаторы являются электрическими машинами с довольно высоким КПД, но если требуется произвести более точный расчет, то КПД находиться как отношение активной мощности на выходе к активной мощности на входе η = P2/P1.
Магнитопровод трансформатора представляет собой закрытый сердечник собранный из листов электротехнической стали толщиной 0, 5 или 0, 35мм. Перед сборкой листы с обеих сторон изолируют лаком.
По типу конструкции различают стержневой (Г-образный) и броневой (Ш-образный) магнитопроводы. Рассмотрим их структуру.
Стержневой трансформатор состоит из двух стержней, на которых находятся обмотки и ярма, которое соединяет стержни, собственно, поэтому он и получил свое название. Трансформаторы этого типа применяются значительно чаще, чем броневые трансформаторы.

Броневой трансформатор представляет собой ярмо внутри которого заключается стержень с обмоткой. Ярмо как бы защищает стержень, поэтому трансформатор называется броневым.

Обмотка
Конструкция обмоток, их изоляция и способы крепления на стержнях зависят от мощности трансформатора. Для их изготовления применяют медные провода круглого и прямоугольного сечения, изолированные хлопчатобумажной пряжей или кабельной бумагой. Обмотки должны быть прочными, эластичными, иметь малые потери энергии и быть простыми и недорогими в изготовлении.
Охлаждение
В обмотке и сердечнике трансформатора наблюдаются потери энергии, в результате которых выделяется тепло. В связи с этим трансформатору требуется охлаждение. Некоторые маломощные трансформаторы отдают свое тепло в окружающую среду, при этом температура установившегося режима не влияет на работу трансформатора. Такие трансформаторы называют “сухими”, т.е. с естественным воздушным охлаждением. Но при средних и больших мощностях, воздушное охлаждение не справляется, вместо него применяют жидкостное, а точнее масляное. В таких трансформаторах обмотка и магнитопровод помещены в бак с трансформаторным маслом, которое усиливает электрическую изоляцию обмоток от магнитопровода и одновременно служит для их охлаждения. Масло принимает теплоту от обмоток и магнитопровода и отдает ее стенкам бака, с которых тепло рассеивается в окружающую среду. При этом слои масла имеющие разницу в температуре циркулируют, что улучшает теплообмен. Трансформаторам с мощностью до 20-30 кВА хватает охлаждения бака с гладкими стенками, но при больших мощностях устанавливаются баки с гофрированными стенками. Также нужно учитывать что при нагреве масло имеет свойство увеличиваться в объеме, поэтому в высокомощных трансформаторах устанавливают резервные баки и выхлопные трубы (в случае если масло закипит, появятся пары которым нужен выход). В трансформаторах меньшей мощности ограничиваются тем, что масло не заливают до самой крышки.
9) Схема замещения однофазного двухобмоточного трансформатора
