Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Замкнутые системы автоматизированного электропривода. АЭП с отрицательной обратной связью по скорости.
|
|
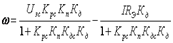
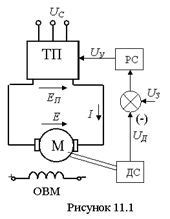 Анализ показывает, что жесткость механических характеристик электропривода с вентильным преобразователем относительно мала. В связи с этим, с целью расширения диапазона регулирования скорости в системах вентильного электропривода постоянного тока, могут использоваться обратные связи, а именно положительная по току якоря, либо отрицательные по скорости и по напряжению. Система АЭП с отрицательной обратной связью по скорости представлена на рисунке 11.1. На рисунке РС – регулятор скорости с коэффициентом усиления КРС, ДС - датчик скорости с передаточным коэффициентом кдс. На сумматоре алгебраически складываются напряжения задания по скорости Uзс и напряжения от датчика скорости Uдс. Напряжение управления равно
Анализ показывает, что жесткость механических характеристик электропривода с вентильным преобразователем относительно мала. В связи с этим, с целью расширения диапазона регулирования скорости в системах вентильного электропривода постоянного тока, могут использоваться обратные связи, а именно положительная по току якоря, либо отрицательные по скорости и по напряжению. Система АЭП с отрицательной обратной связью по скорости представлена на рисунке 11.1. На рисунке РС – регулятор скорости с коэффициентом усиления КРС, ДС - датчик скорости с передаточным коэффициентом кдс. На сумматоре алгебраически складываются напряжения задания по скорости Uзс и напряжения от датчика скорости Uдс. Напряжение управления равно
Uy = (Uзс – Uдс)× крс. (11.1)
ЭДС преобразователя уравновешивается ЭДС двигателя и падением напряжения на эквивалентном сопротивлении
Еп = Uу × кп = Е + I× RЭ, (11.2)
где Е = k× Фн× ω - ЭДС якоря ДПТ;
КП – коэффициент усиления преобразователя.
Напряжение датчика скорости пропорционально частоте вращения якоря двигателя
Uдс = кдс× ω. (11.3)
Совместное решение уравнений (11.1), (11.2) и (11.3) дает выражение (11.4) для электромеханической характеристики привода с отрицательной обратной связью по скорости
(Uзс – кдс× ω)× крс× кп = k× Фн× ω + I× RЭ,
Uзс× крс× кп + кдс× ω × крс× кп = k× Фн× ω + I× RЭ,
 (11.4)
(11.4)
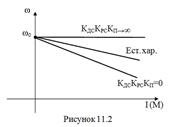
где Кд = 1/kФН – коэффициент передачи двигателя.
40. Замкнутые системы автоматизированного электропривода. АЭП с обратной связью по току.
Анализ показывает, что жесткость механических характеристик электропривода с вентильным преобразователем относительно мала. В связи с этим, с целью расширения диапазона регулирования скорости в системах вентильного электропривода постоянного тока, могут использоваться обратные связи, а именно положительная по току якоря, либо отрицательные по скорости и по напряжению. Система АЭП с отрицательной обратной связью по скорости представлена на рисунке 11.1.
 На рисунке РС – регулятор скорости с коэффициентом усиления КРС, ДС - датчик скорости с передаточным коэффициентом кдс. На сумматоре алгебраически складываются напряжения задания по скорости Uзс и напряжения от датчика скорости Uдс. Напряжение управления равно
На рисунке РС – регулятор скорости с коэффициентом усиления КРС, ДС - датчик скорости с передаточным коэффициентом кдс. На сумматоре алгебраически складываются напряжения задания по скорости Uзс и напряжения от датчика скорости Uдс. Напряжение управления равно
Uy = (Uзс – Uдс)× крс. (11.1)
ЭДС преобразователя уравновешивается ЭДС двигателя и падением напряжения на эквивалентном сопротивлении
Еп = Uу × кп = Е + I× RЭ, (11.2)
где Е = k× Фн× ω - ЭДС якоря ДПТ;
КП – коэффициент усиления преобразователя.иНапряжение датчика скорости пропорционально частоте вращения якоря двигателя
Uдс = кдс× ω. (11.3)
Совместное решение уравнений (11.1), (11.2) и (11.3) дает выражение (11.4) для электромеханической характеристики привода с отрицательной обратной связью по скорости
(Uзс – кдс× ω)× крс× кп = k× Фн× ω + I× RЭ,
Uзс× крс× кп + кдс× ω × крс× кп = k× Фн× ω + I× RЭ,  (11.4)
(11.4)
где Кд = 1/kФН – коэффициент передачи двигателя.
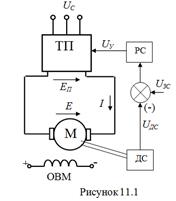
На рисунке 11.2 представлены естественная и искусственные статические характеристики ЭП с ООС по скорости. В замкнутой системе снижение скорости
и при кдс× крс× кп = 0 соответствуют разомкнутой системе. При кдс× крс× кп → ¥ (т.е. при очень большом коэффициенте усиления) можно получить абсолютно жесткие характеристики (∆ ω = 0). Такие же характеристики можно получить при интегральном регуляторе скорости.
На рисунке 11.3 представлена схема ЭП с обратной связью по току.
Напряжение управления и ЭДС преобразователя определяются, как
Uy = (UзТ ± UдТ)× крТ, (11.5)
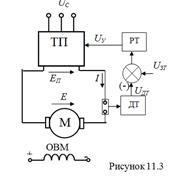
Еп = Uу × кп = Е + I× RЭ. (11.6)
Напряжение датчика тока пропорционально току якоря двигателя
UдТ = кдТ× I = β × I× RЭ.. (11.7)
Совместное решение уравнений (9.5), (9.6) и (9.7) дает выражение (9.8) для электромеханической характеристики привода с положительной или отрицательной обратной связью по току
 , (11.8)
, (11.8)
где (+) – для положительной ОС, (-) – для отрицательной ОС.
При положительной обратной связи по току снижение скорости
 ,
,
и при кдТ× крТ× β = 0 соответствует разомкнутой схеме, при кдТ× крТ× β = 0 характеристика будет абсолютно жесткой, а при кдТ× крТ× β → ∞ - ∆ ω → -∞ (отрицательная жесткость).
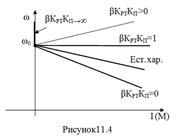
Положительная обратная связь по току делает характеристики более жесткими, чем те же характеристики в разомкнутой системе (см. рисунок 11.4).Отрицательная обратная связь по току обеспечивает перепад скорости

и применяется для реализации мягких характеристик ЭП. При кдТ× крТ× β = 1 характеристика будет соответствовать разомкнутой системе, а при кдТ× крТ× β → ∞ - ∆ ω → ∞ (абсолютно мягкая). В одноконтурных системах АЭП отрицательная обратная связь, как правило, применяется задержанная, т.е. вступает в работу при определенной токовой нагрузке. Для задержания ОС применяется стабилитрон.
41.Двухконтурная система электропривода с отрицательной обратной связью по скорости и отсечкой (задержанной обратной связью) по току. 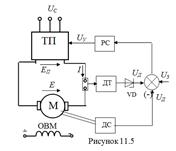
С целью ограничения тока в вентильном преобразователе и якоре двигателя может использоваться задержанная отрицательная обратная связь по току (токовая отсечка). В этом случае электропривод имеет экскаваторную характеристику. На рисунке 11.5 представлена функциональная схема двухконтурной системы электропривода с отрицательной обратной связью по скорости и отсечкой (задержанной обратной связью) по току.
В зависимости от величины тока якоря, возможны два режима работы привода:
а) I < Iотс, ½ Uдт½ < Uст VD.
В рабочем диапазоне тока работает только одна отрицательная обратная связь по скорости (сигнал ОС по току не поступает на усилитель).Тогда параметры и характеристики (при Rзс = Rдс) описываются уравнениями (11.1 – 11.4);
б) I > Iотс, ½ Uдт½ > Uст VD.
В этом диапазоне тока одновременно на входе регулятора скорости действуют два сигнала ОС:
- сигнал по скорости, который стремится сделать скоростную
характеристику более жесткой;
- сигнал по току, который стремится сделать скоростную характеристику более мягкой.
Для получения требуемой характеристики должна преобладать ОС по току. Сигнал управления становится равен
Uy = (Uзс – Uдс – Uдт + Uст)× крс (11.9)
где UДТ = b× I× RЭ - сигнал датчика тока;
UСТ – напряжение пробоя стабилитрона.
Решая совместно уравнения (11.2), (11.3) и (11.5), получим выражение (11.10) для второго участка электромеханической характеристики привода при наличии обратных связей по скорости и по току
[Uзс – ω × кдс – b× I× (Ra + Rп) + Uст]× крс× кп = се× Фн× ω + I× (Ra + Rп),
 . (11.10)
. (11.10)
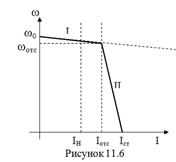
Статические характеристики двухконтурной системы АЭП с отрицательной ОС по скорости и отсечкой по току представлены на рисунке 11.6.
Для того, чтобы сформировать такую характеристику, необходимо рассчитать параметры
преобразователя, датчиков скорости и тока, регуляторов, что составляет содержание РГР.
42. Переходные процессы в электроприводе при L=0 и изменениях воздействующих факторов скачком. MС=const, M ≡ ω.
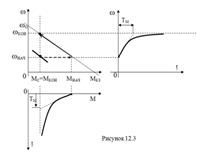
в) MС=const, M ≡ ω (рисунок 12.3)
Уравнение линейной механической характеристики двигателя с отрицательной жесткостью (например, ДПТ НВ) может быть записано, как
 , (12.4)
, (12.4)
или
 , (12.5)
, (12.5)
где β =dM/dω – жесткость механической характеристики, для линейной характеристики β =∆ M/∆ ω.
Из (12.5) и (12.1) получаем
 ,
,
или

Подставив в (12.1) значение dω /dt, полученное из (12.4), получим
 ,
,
43. Переходные процессы в электроприводе при L=0 и изменениях воздействующих факторов скачком. MС, M нелинейны.
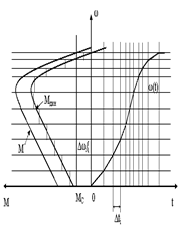
В этом случае можно воспользоваться одним из итерационных методов. Для примера приводим графо – аналитическую интерпретацию пуска АД.
Статическая механическая характеристика АД М(s) строится по формуле Клосса (5.9) в диапазоне скольжений от 1 до 0 (двигательный режим). Далее рассчитывается и строится кривая динамического момента (рисунок 12.4)
 ,
,
которая разбивается на n участков. На каждом участке динамический момент равен Мдинi. Переходя от бесконечно малых приращений к конечным приращениям, уравнение движения (3) записываем для i – го участка, как
 ,
,
время пуска на каждом участке
|
 .
.
Рисунок 12.4