Главная страница Случайная страница
КАТЕГОРИИ:
АвтомобилиАстрономияБиологияГеографияДом и садДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеталлургияМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРелигияРиторикаСоциологияСпортСтроительствоТехнологияТуризмФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Механизм
|
|
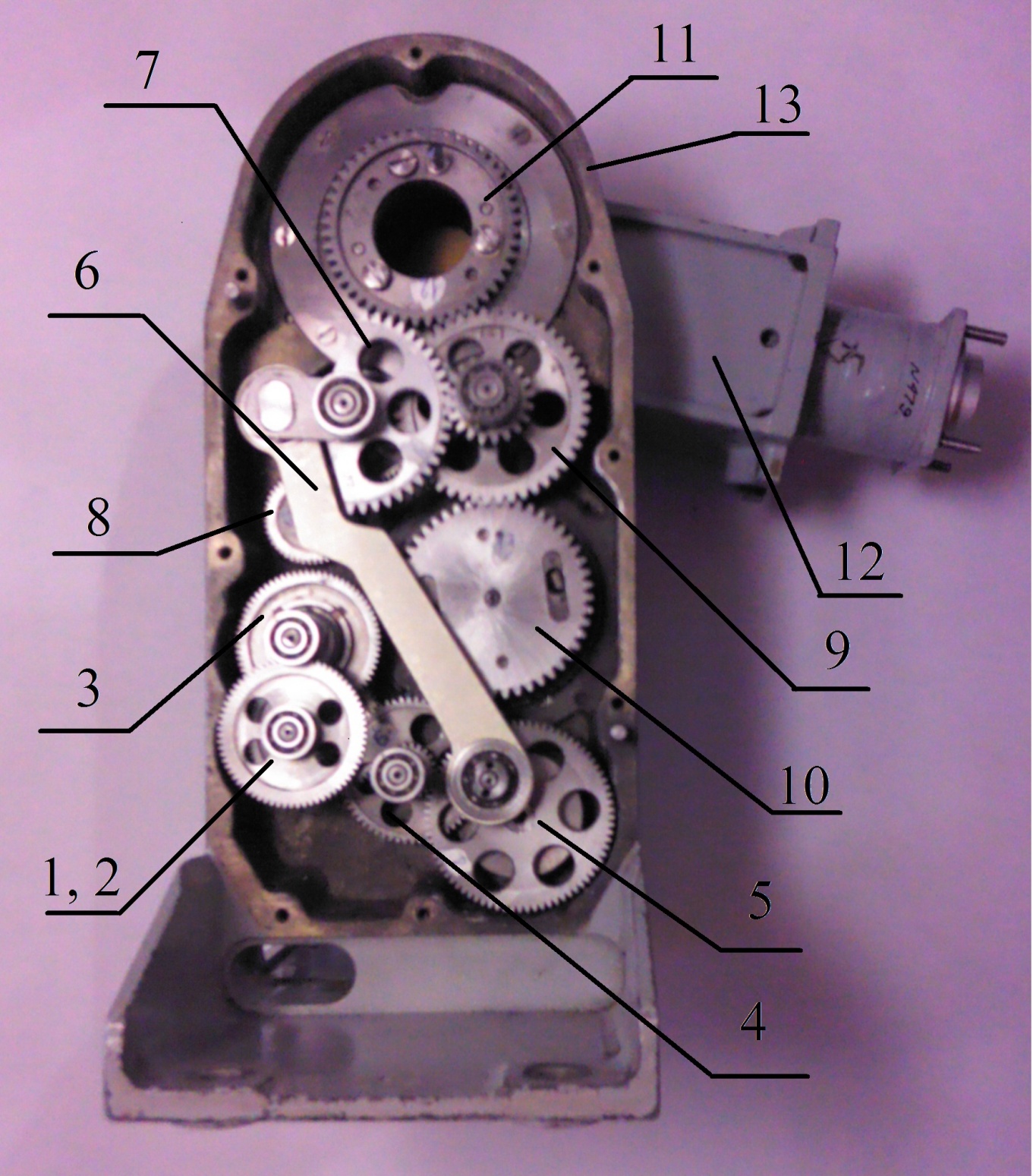
Рис. 2 Механизм
Позиции с 1-й(рис.4) по 11-ю(рис.2) — звенья с зубчатыми колесами (кроме 6-й(рис.6) — шатуна). 8-е(рис.2) колесо соединено со счетчиком-регистратором оборота антенны. 10-я(рис.9.1) позиция – колесо, соединенное с вращающимся синусно-косинусным трансформатором 6ВТИ-2ТВ, измеряющим угол поворота антенны. 12-я позиция(рис.2) — держатель антенны локатора. 13-я(рис. 3.2) — корпус механизма. Зубчатое колесо 1 звена 1(рис.4) в рассматриваемой цепи не участвует, и, скорее всего, передает частоту вращения входного вала другим узлам РЛС.
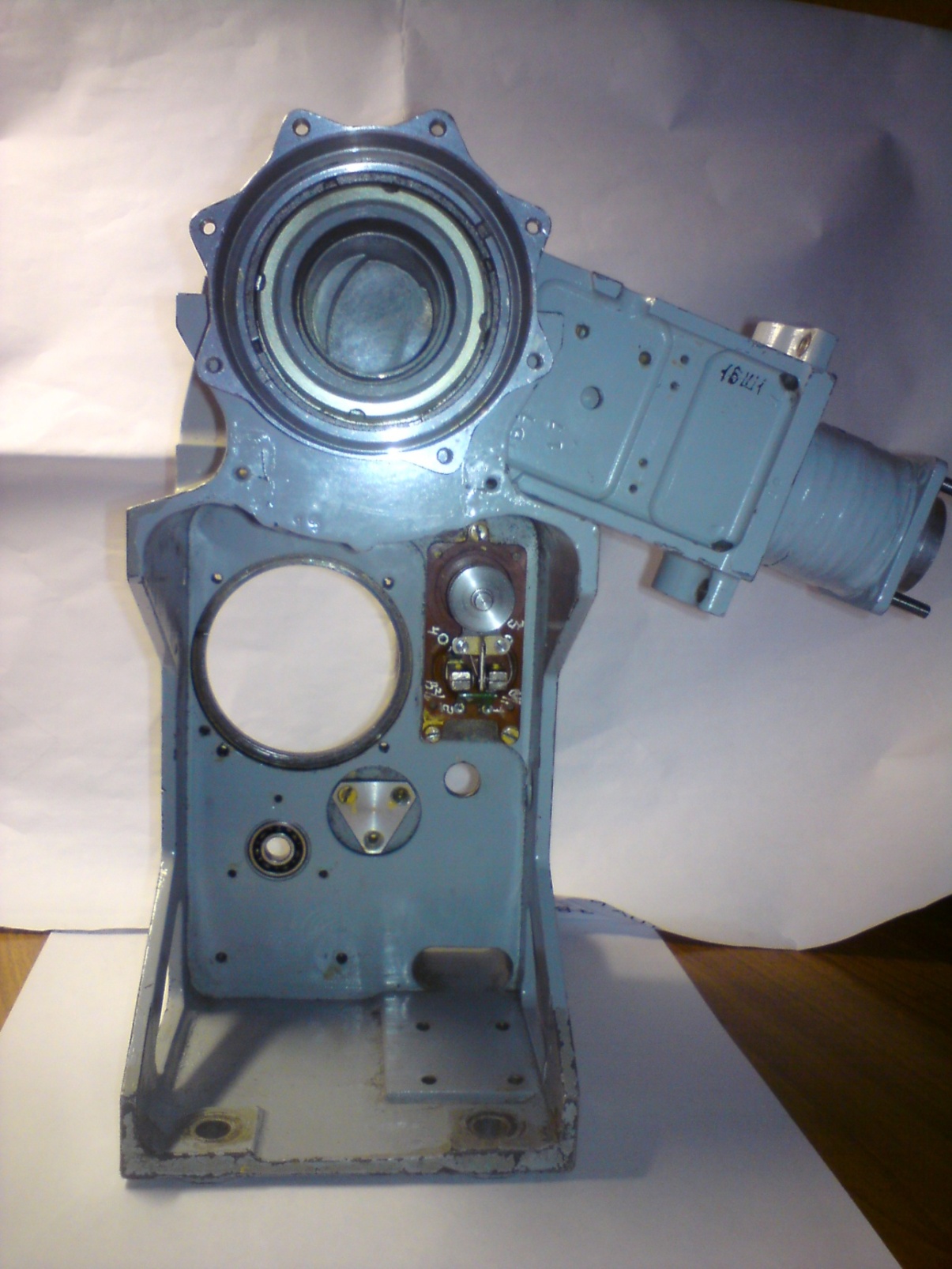
Рис. 3.1 Корпус (вид сзади)
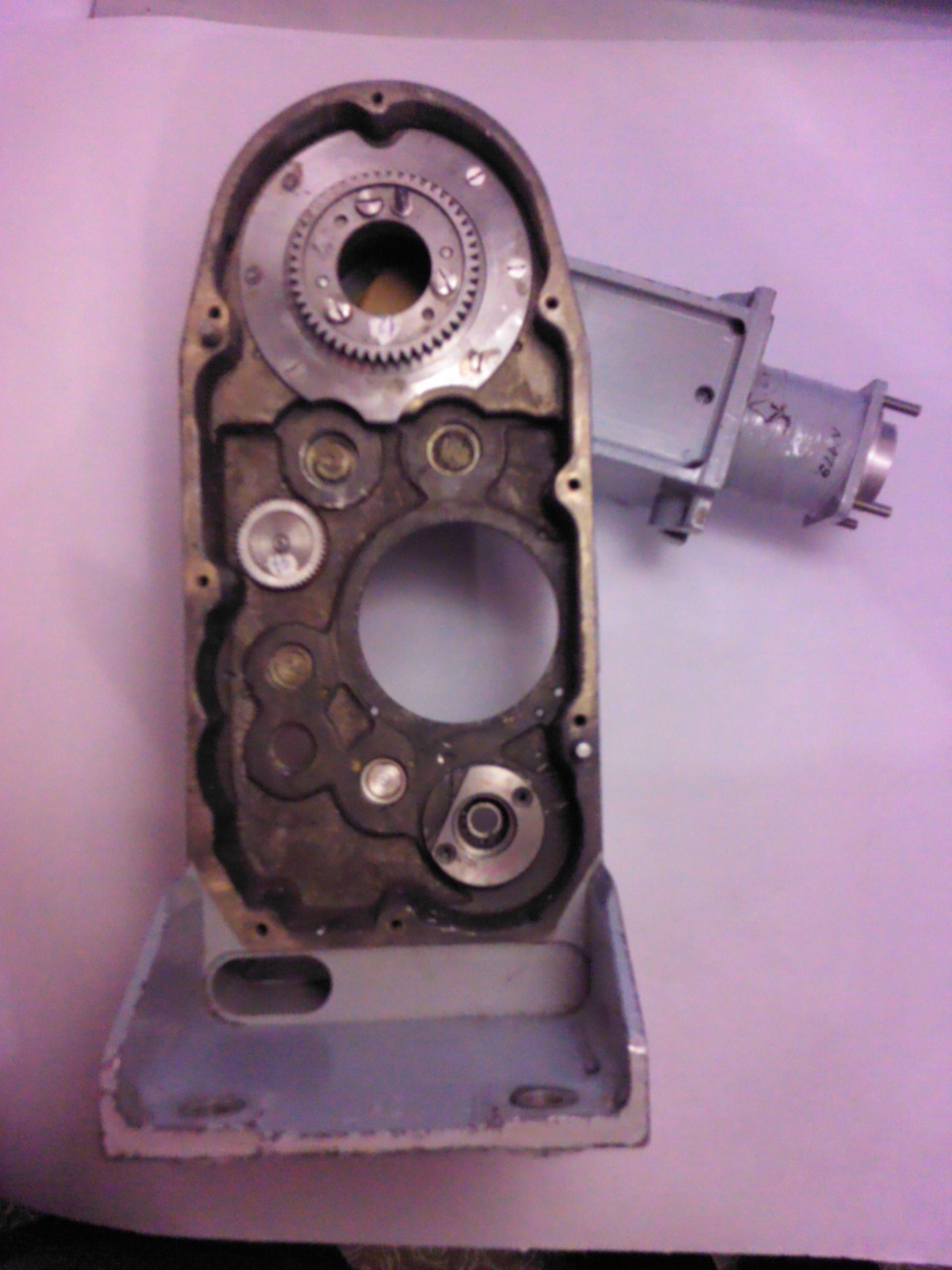
Рис. 3.2 Корпус

Рис. 4 Звенья 1, 2 на входном валу
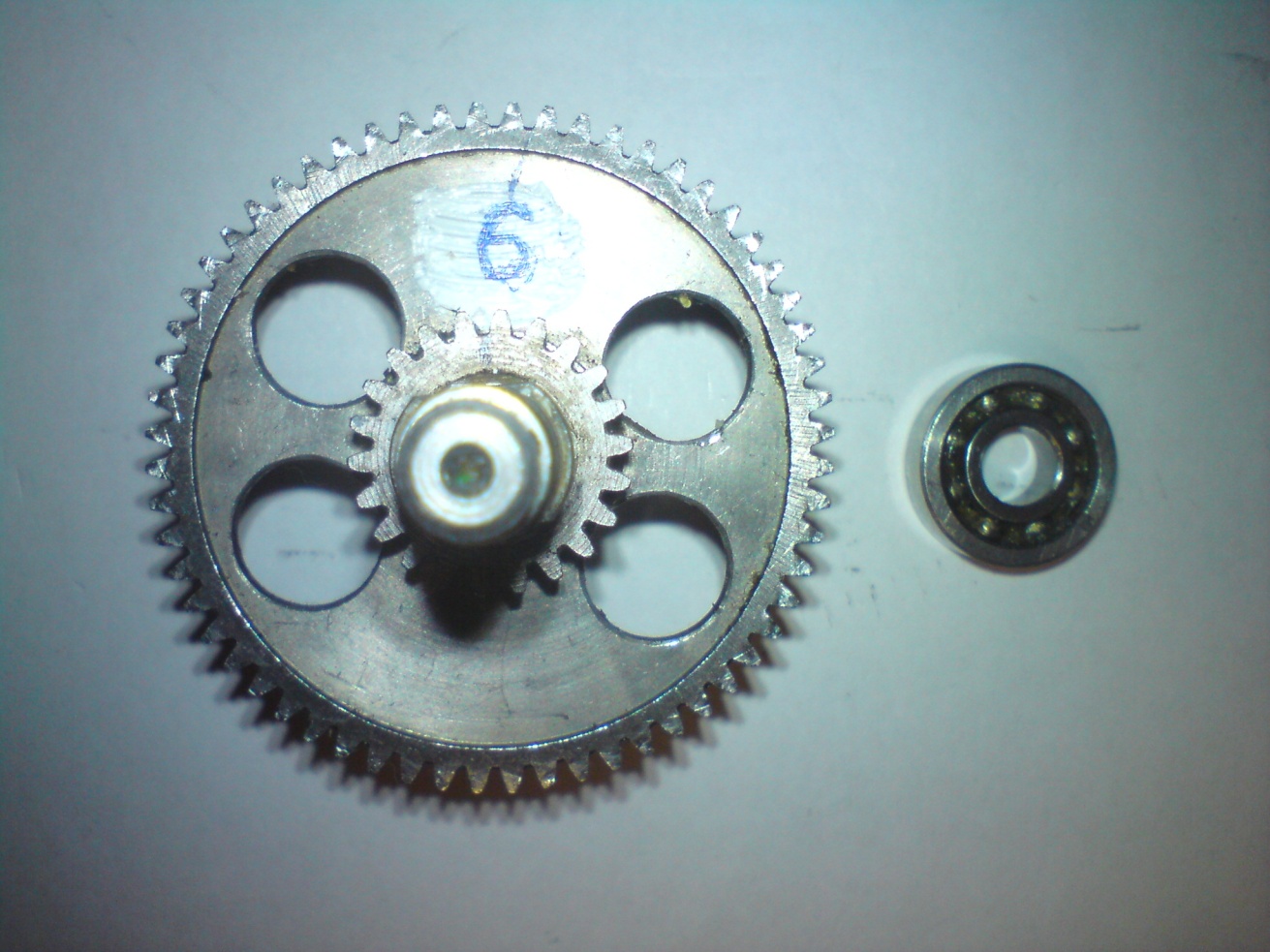
Рис. 5 Звено 4

Рис. 6 Звенья 6 (шатун) и 7

Рис. 7 Звено 5

Рис. 8 Звено 3

Рис. 9.1 Блок 10

Рис. 9.2 Блок (вид спереди)

Рис. 10 Шкала угла поворота антенны

Рис.11 Звено 9